Downloaded 20 times






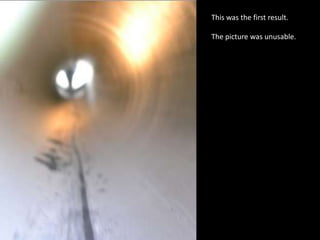










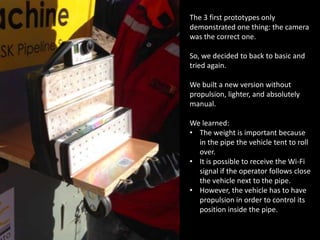















The document describes the development of an inspection robot for steel pipes through a process of continuous improvement using prototypes. The initial prototypes tested different methods of camera implementation and locomotion but faced challenges with range, image quality, and motion control. Subsequent prototypes refined these aspects, with prototype 4 achieving clear images over 50 meters using WiFi. The final prototype had 6 wheels, radio control over 250 meters, and added a cleaning function. This process allowed the company to develop a high-quality inspection robot and save thousands in costs.





























![Taller de Modelos de Negocios - Canvas [Español]](https://cdn.slidesharecdn.com/ss_thumbnails/businessmodel-canvas-250320205509-9007a9d9-thumbnail.jpg?width=640&height=640&fit=bounds)





































