Downloaded 132 times
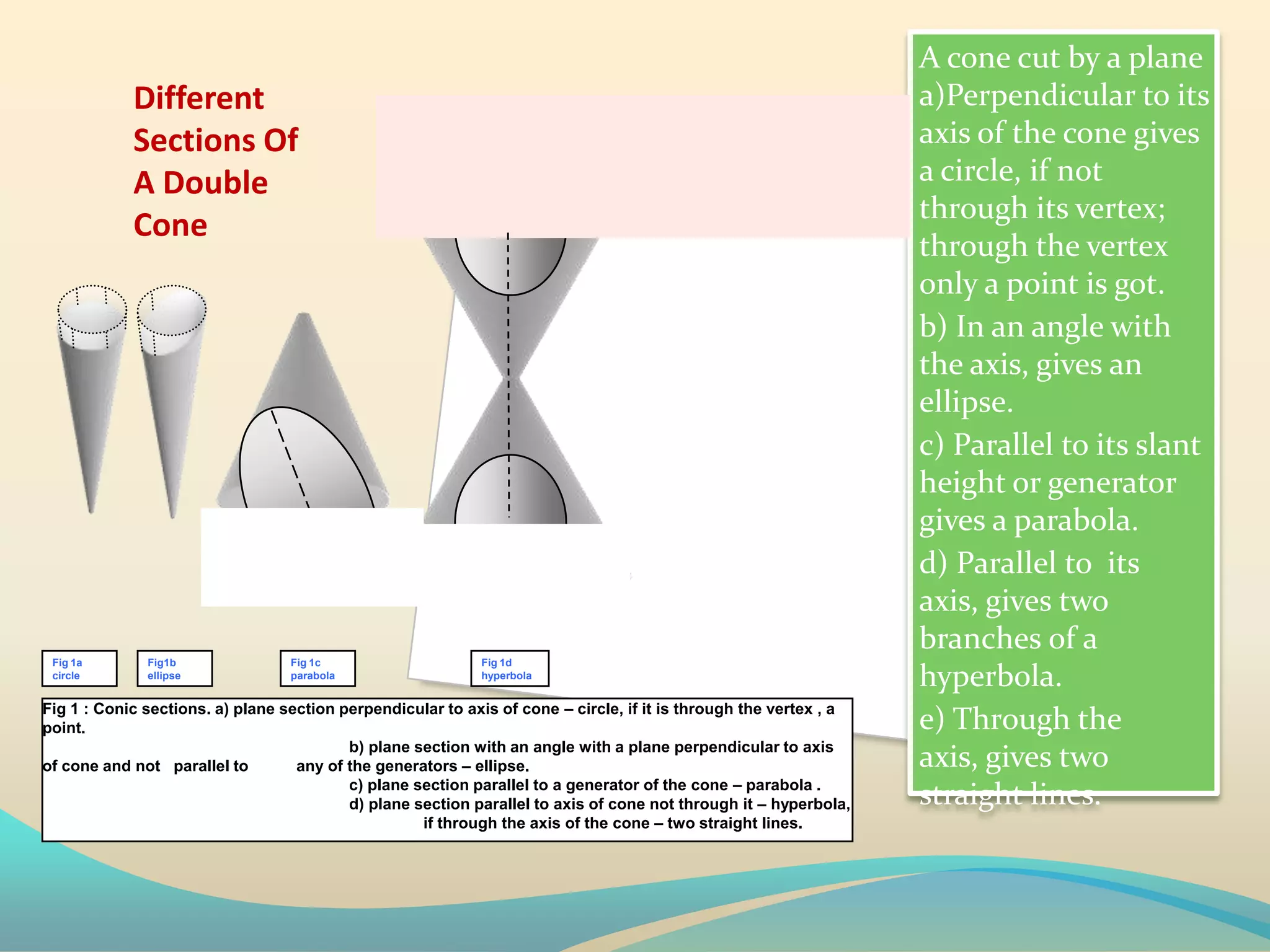

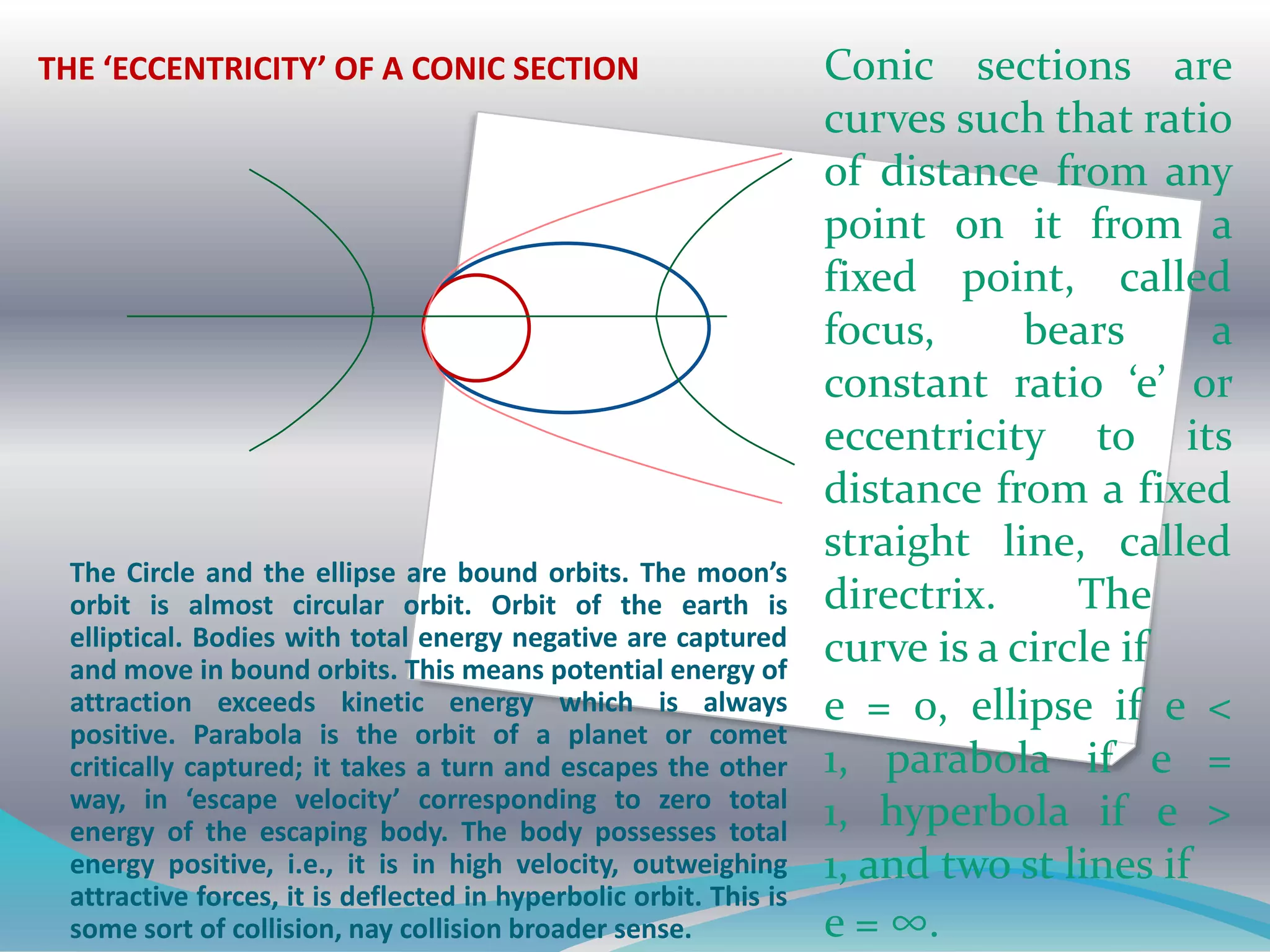
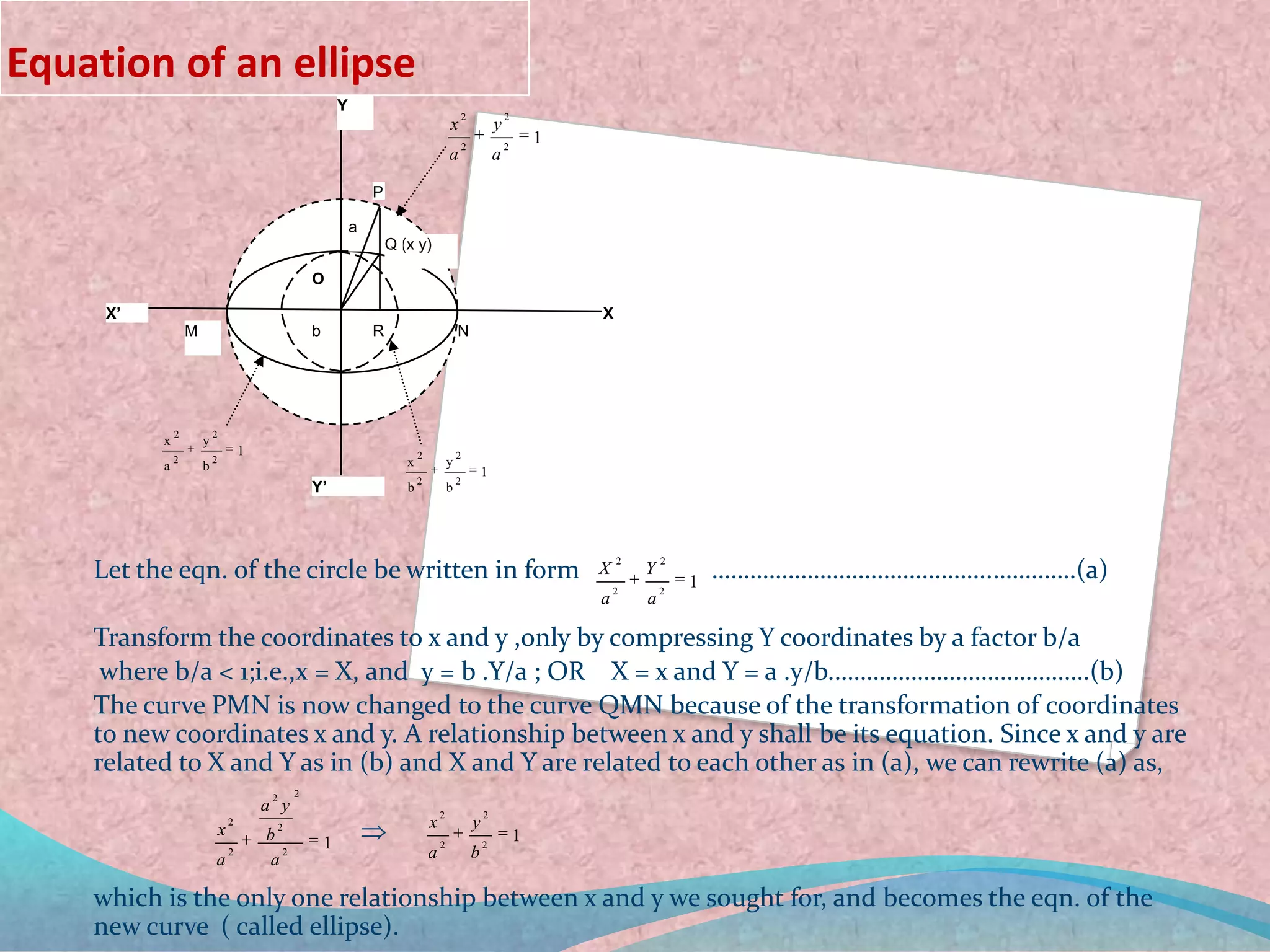

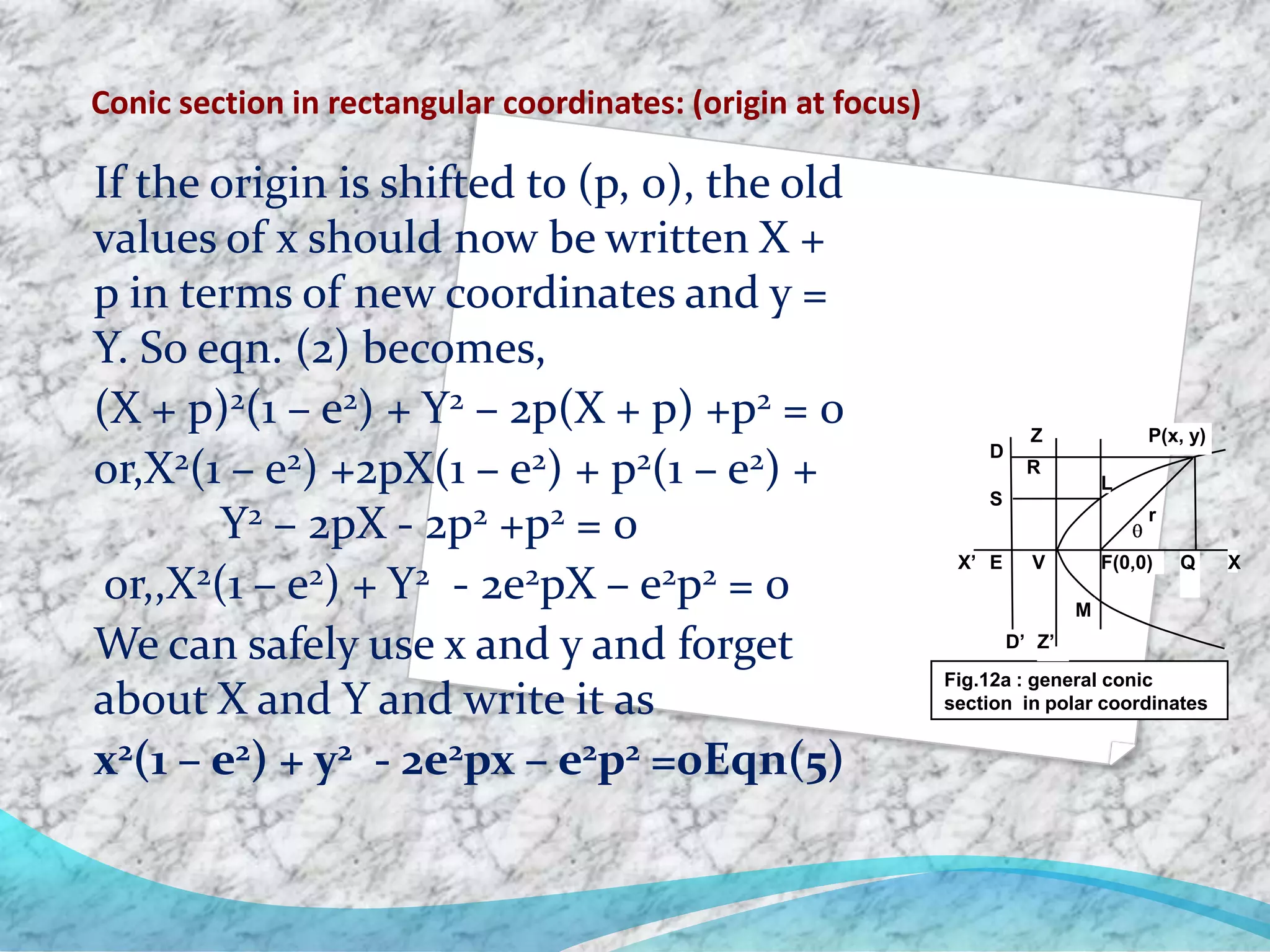
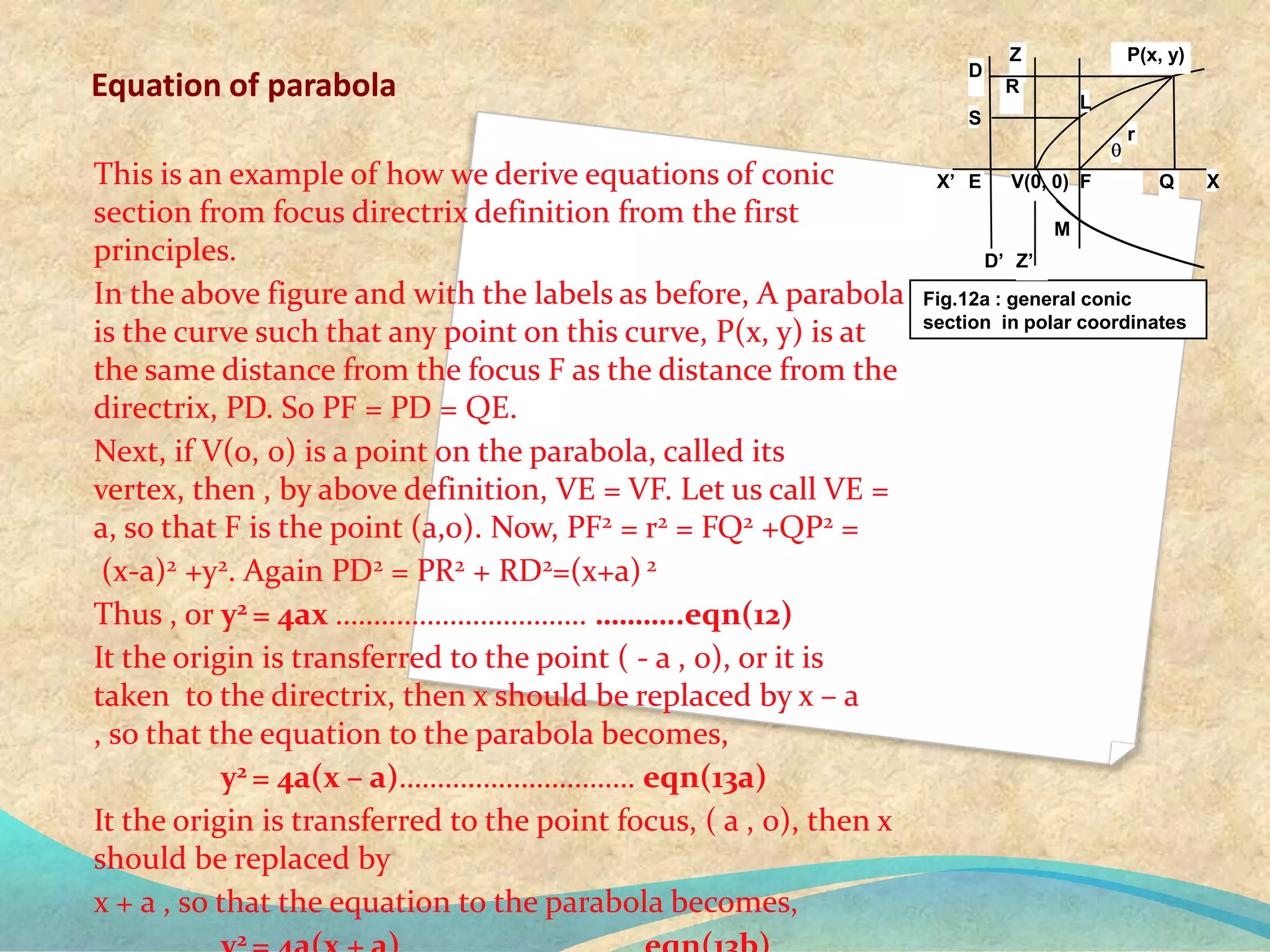
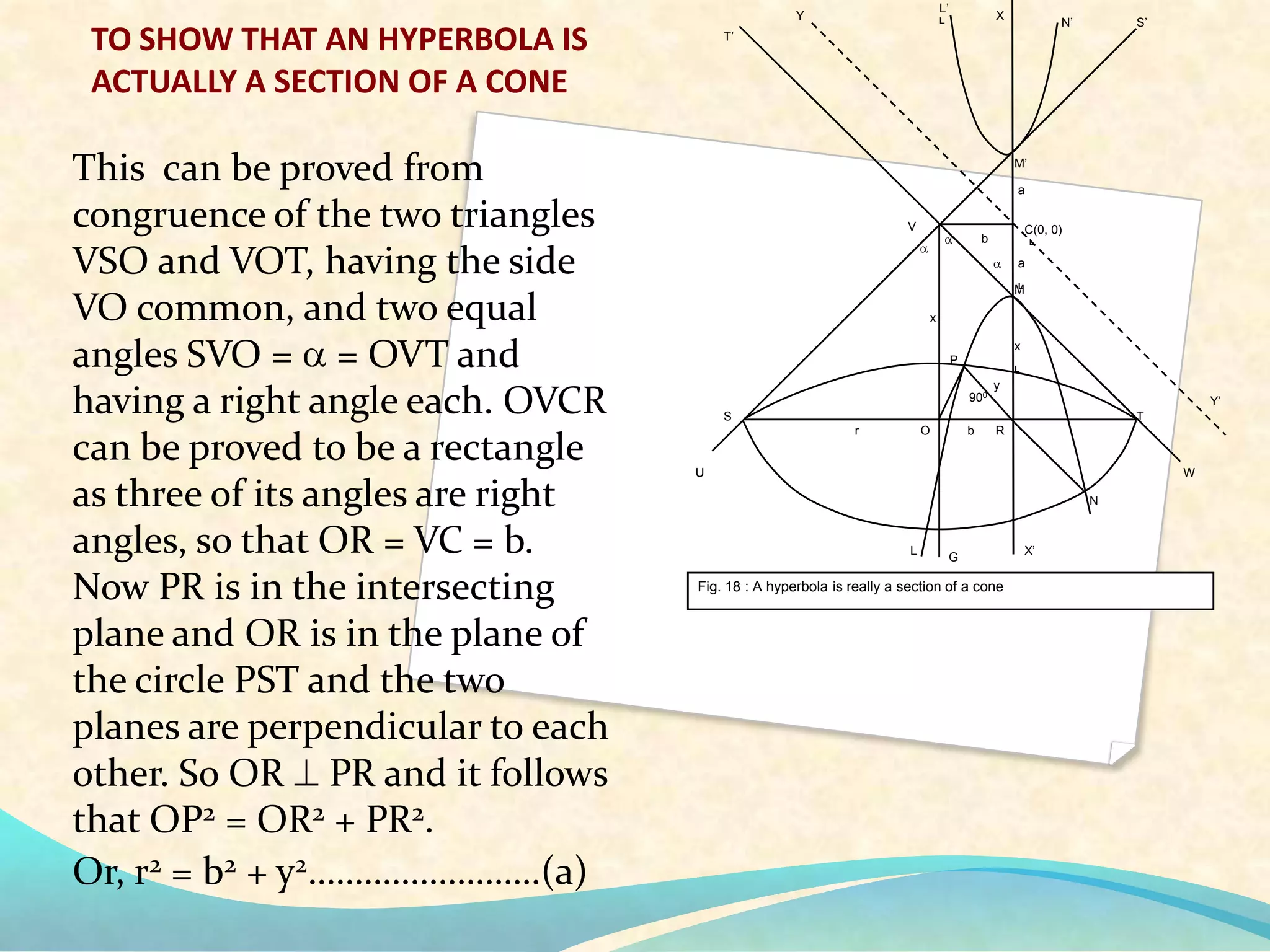

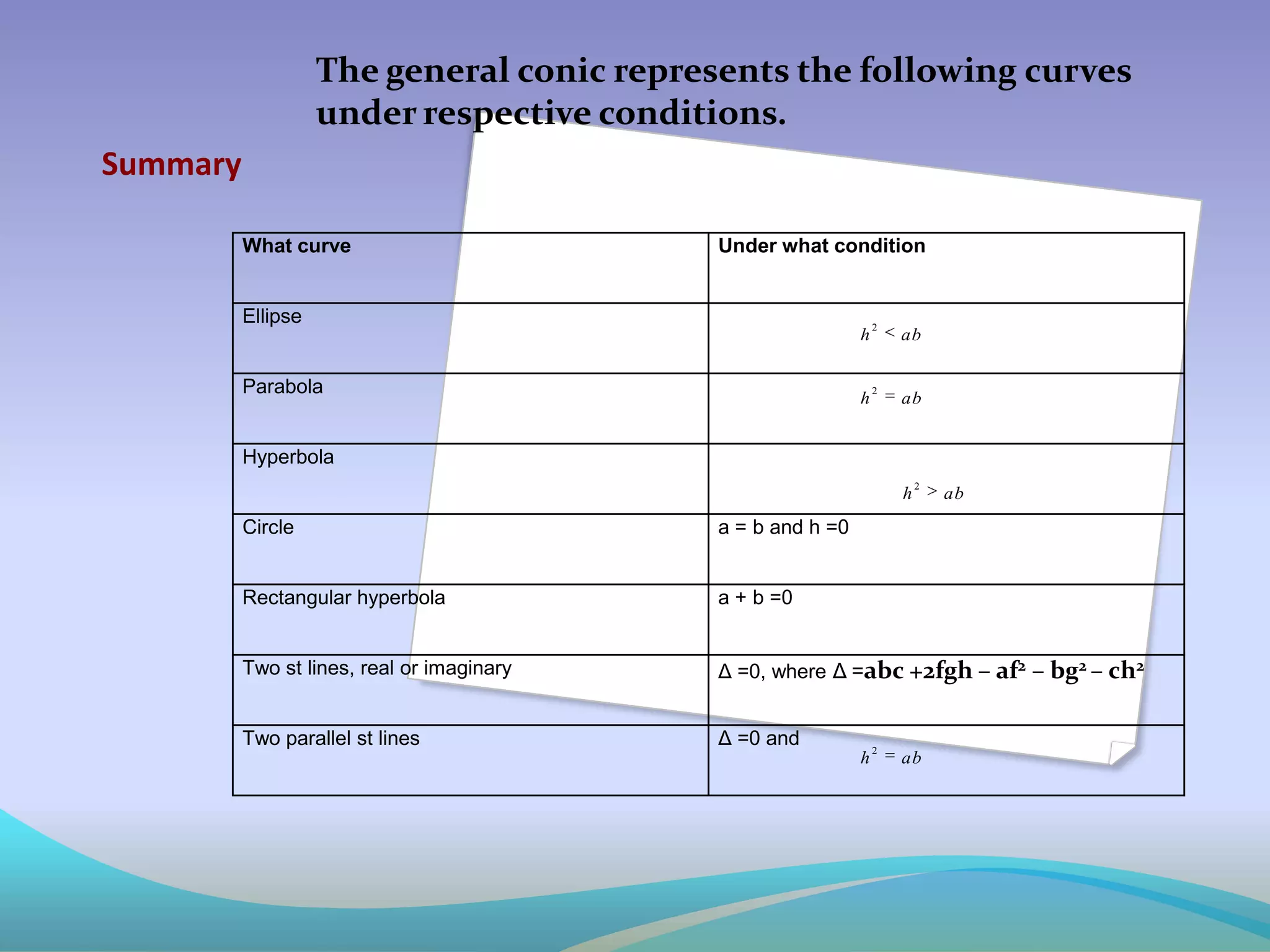
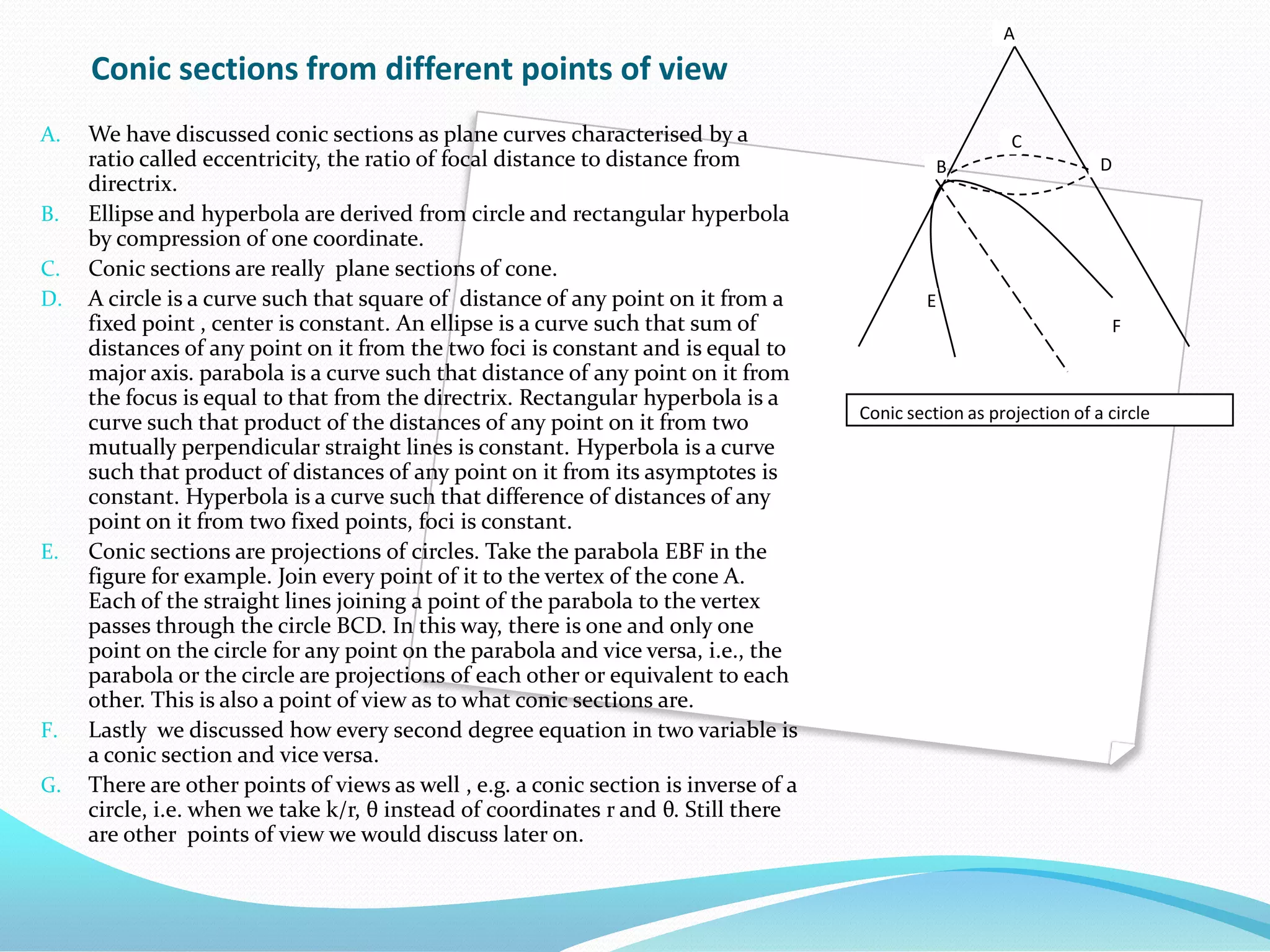
The document discusses conic sections, which are curves formed by the intersection of a cone with a plane. There are four types of conic sections: circles, ellipses, parabolas, and hyperbolas. The document provides equations to define each conic section and explains how the eccentricity relates the distance from a point on the curve to the focus and its perpendicular distance to the directrix. It also presents methods to derive the equations of conic sections in both polar and rectangular coordinate systems with the origin at either the focus or directrix.































































