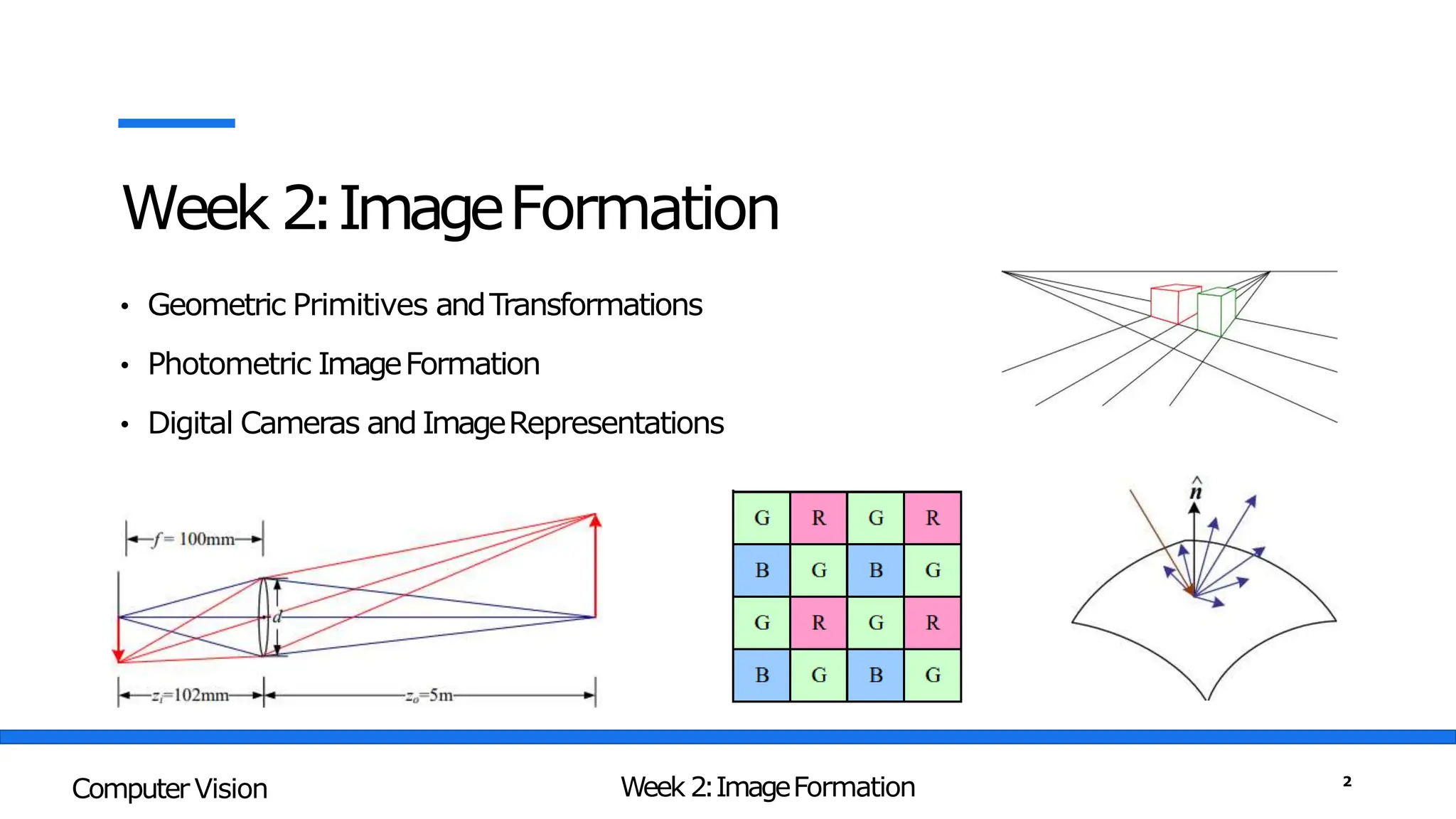
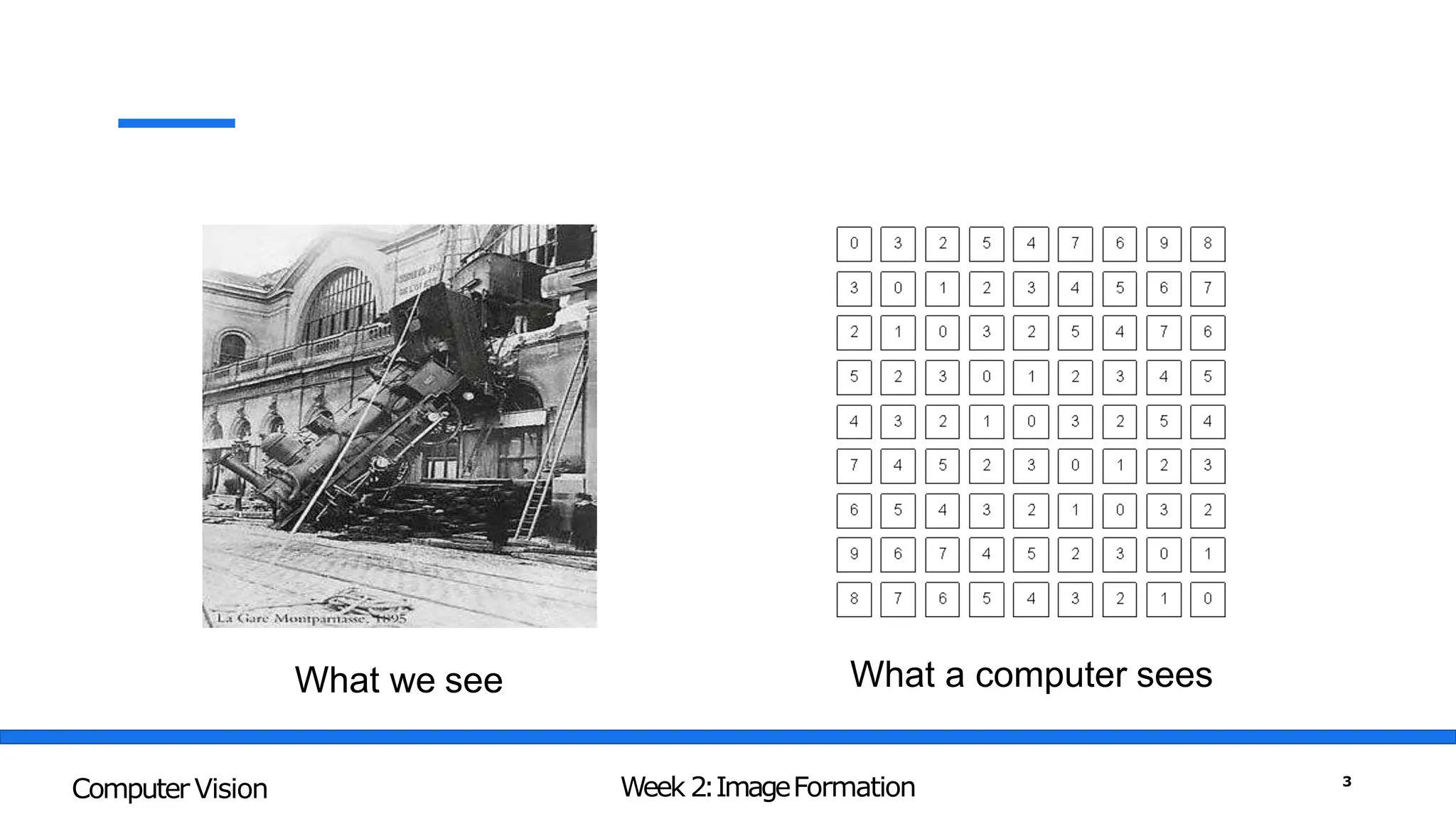
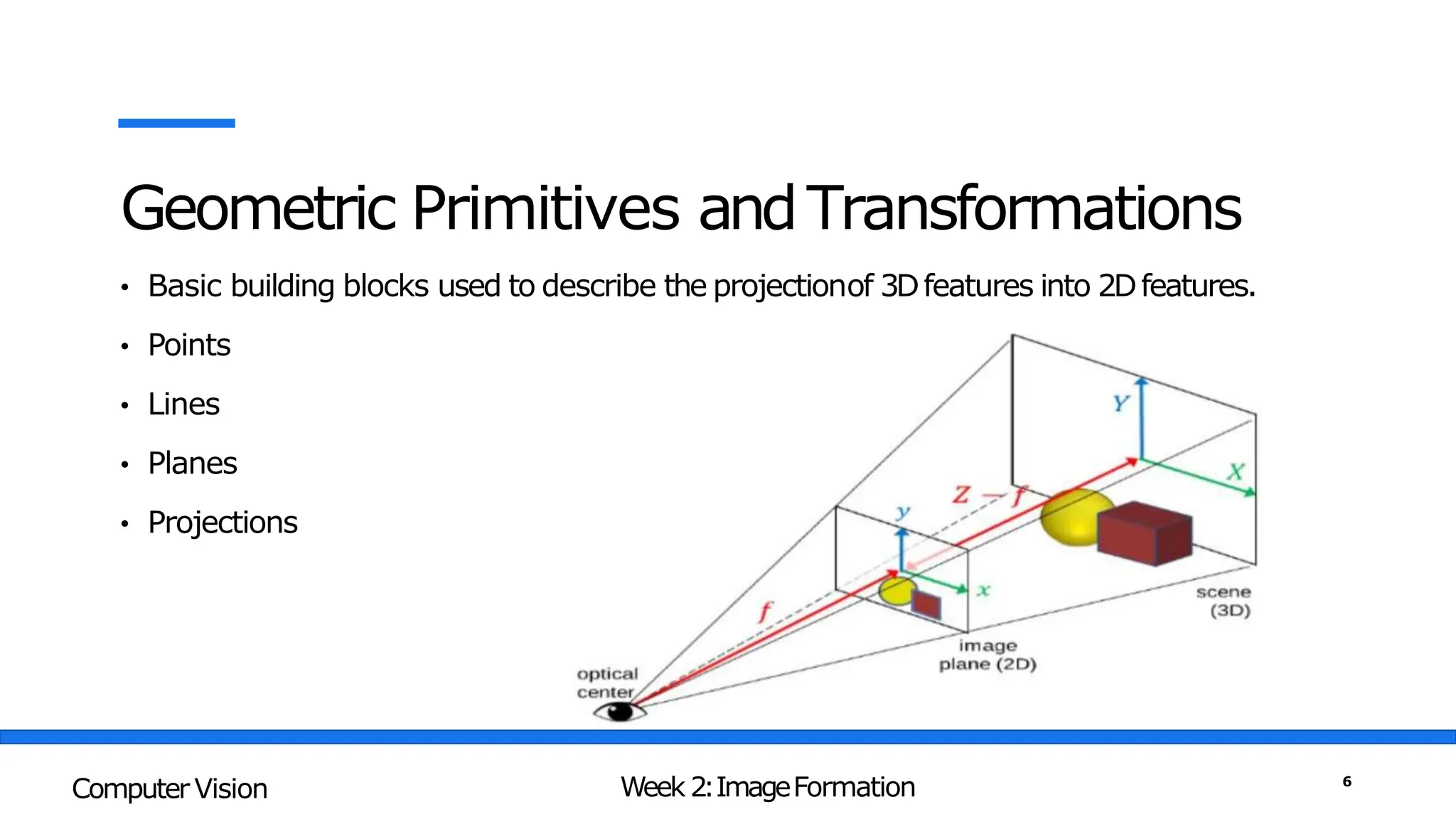
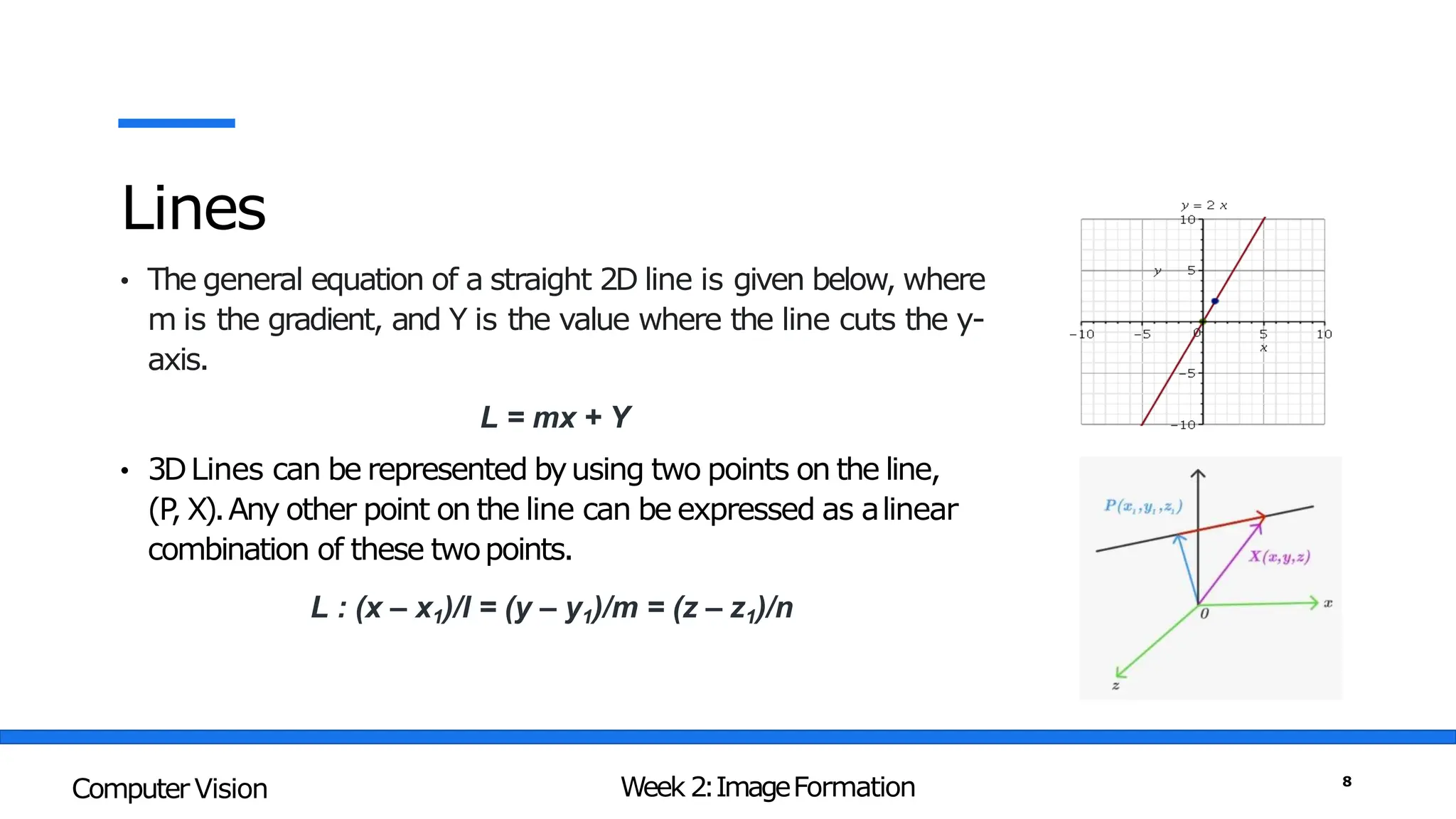
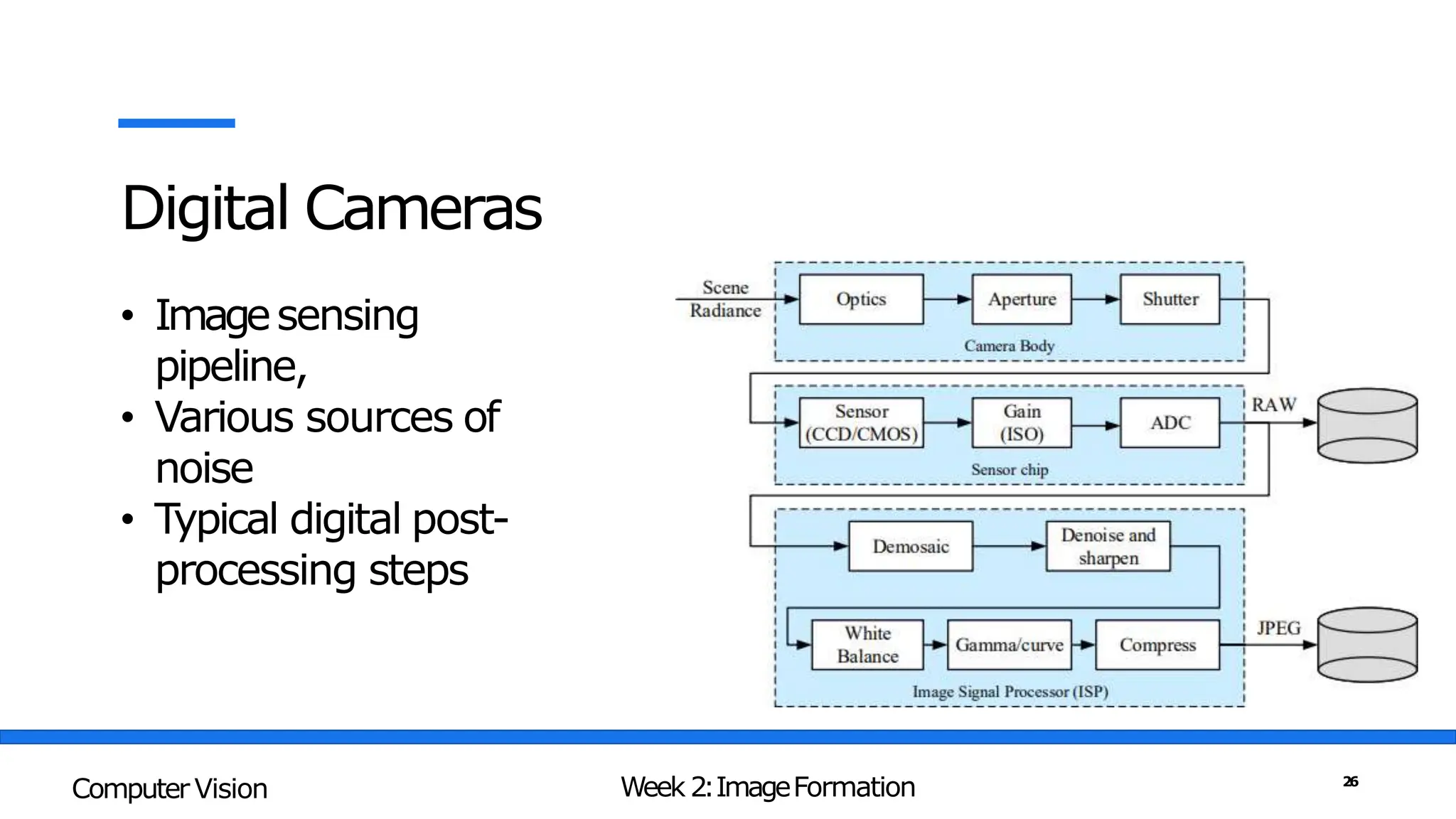
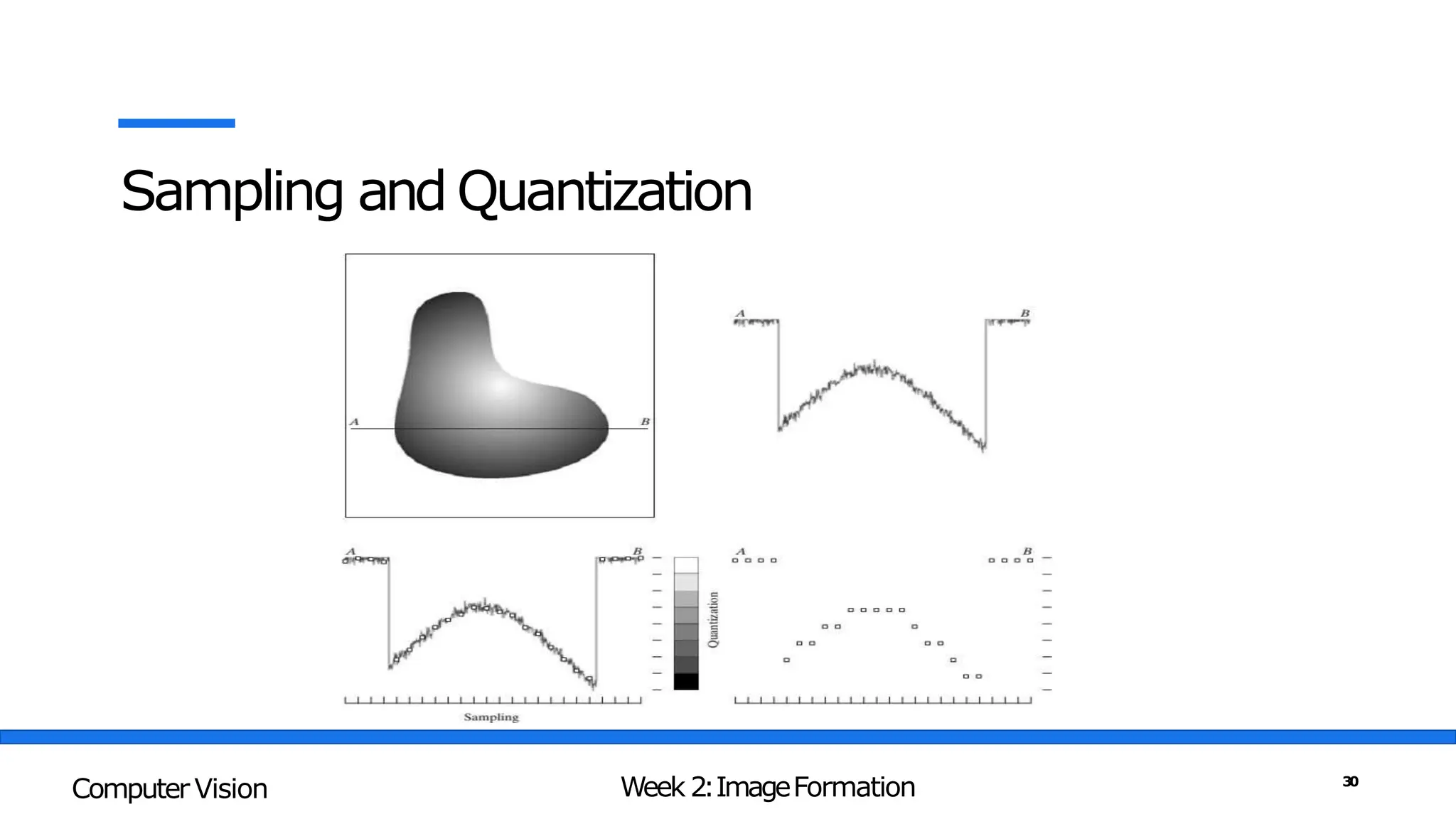
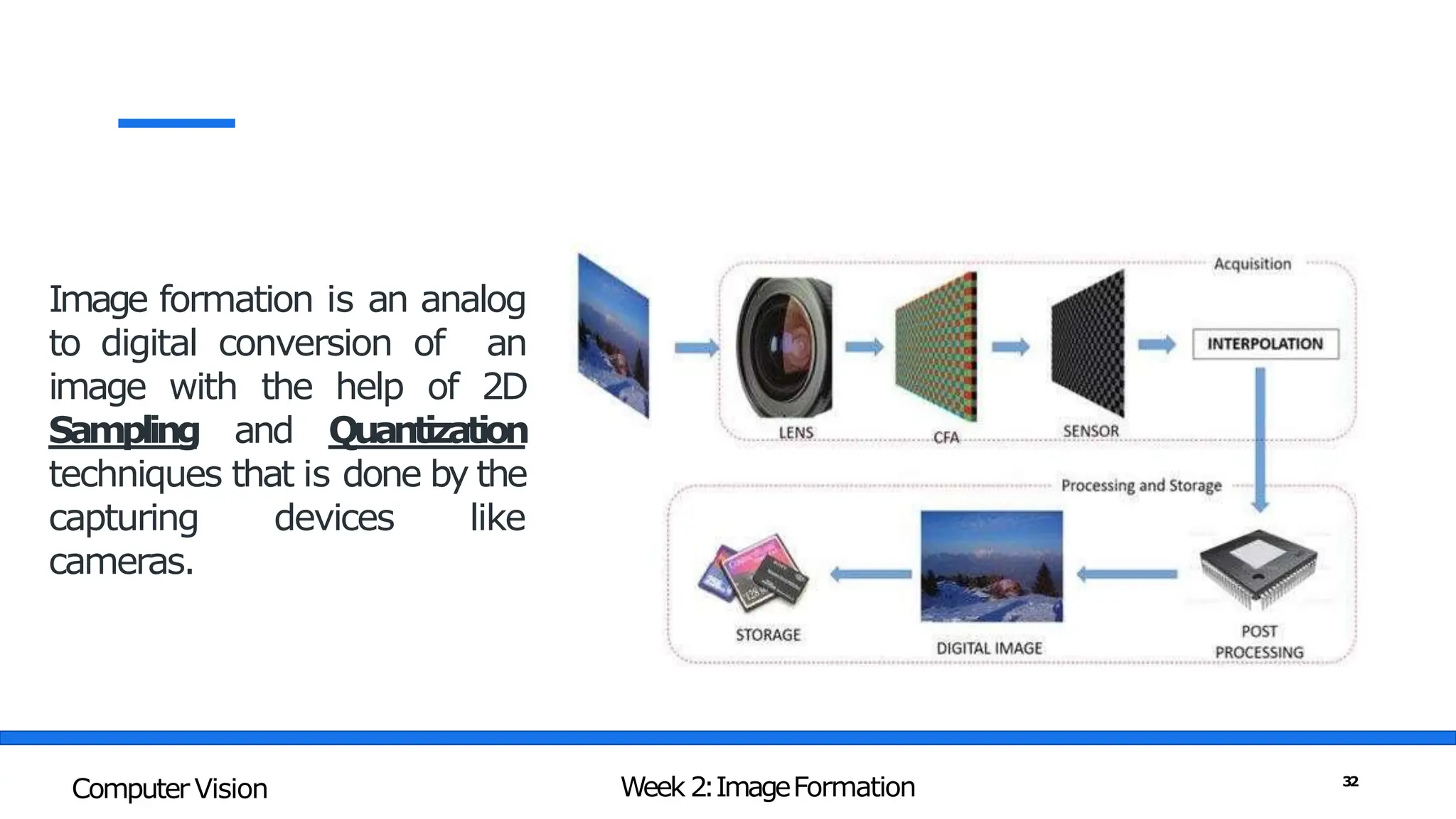
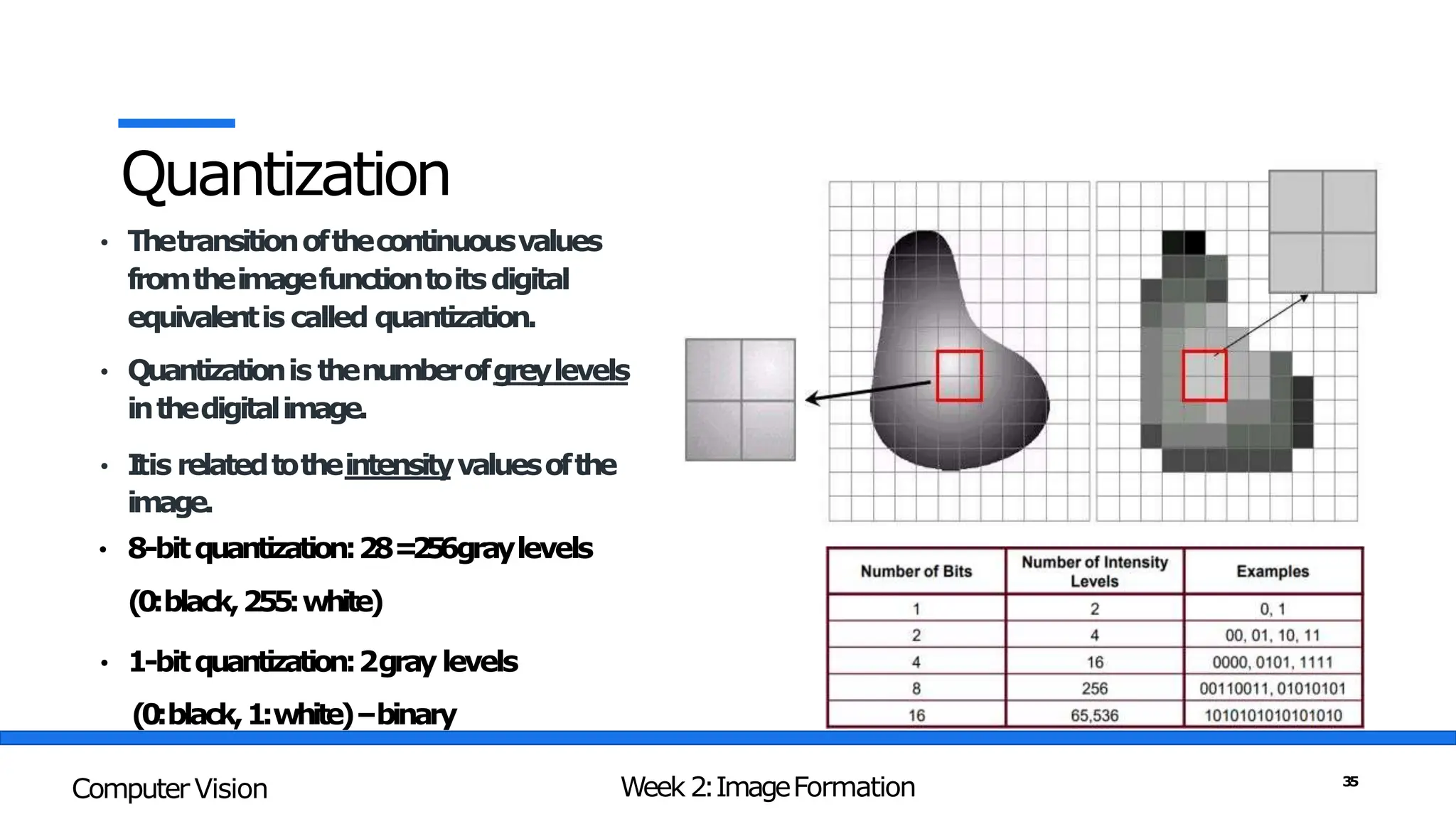
The document discusses image formation in computer vision, including geometric primitives like points, lines, and planes; photometric image formation in the human eye and digital cameras; and different image representations like binary, grayscale, and RGB images. Key topics covered include the electromagnetic spectrum, trichromatic vision, lenses, focal length, sampling and quantization in digital images, and factors affecting the performance of digital cameras.