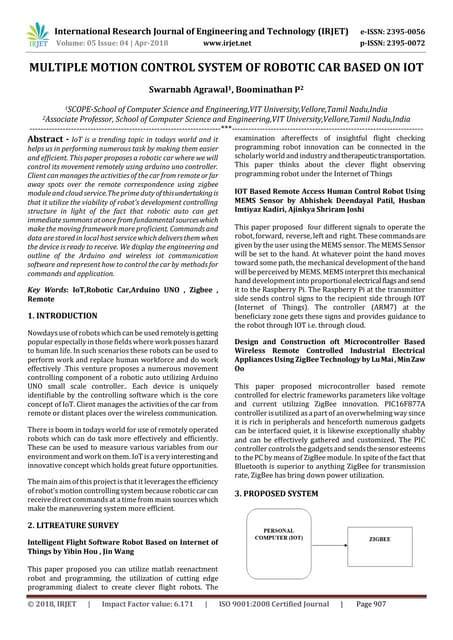
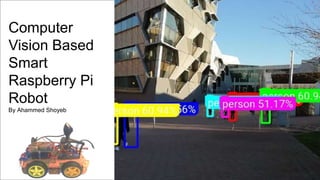
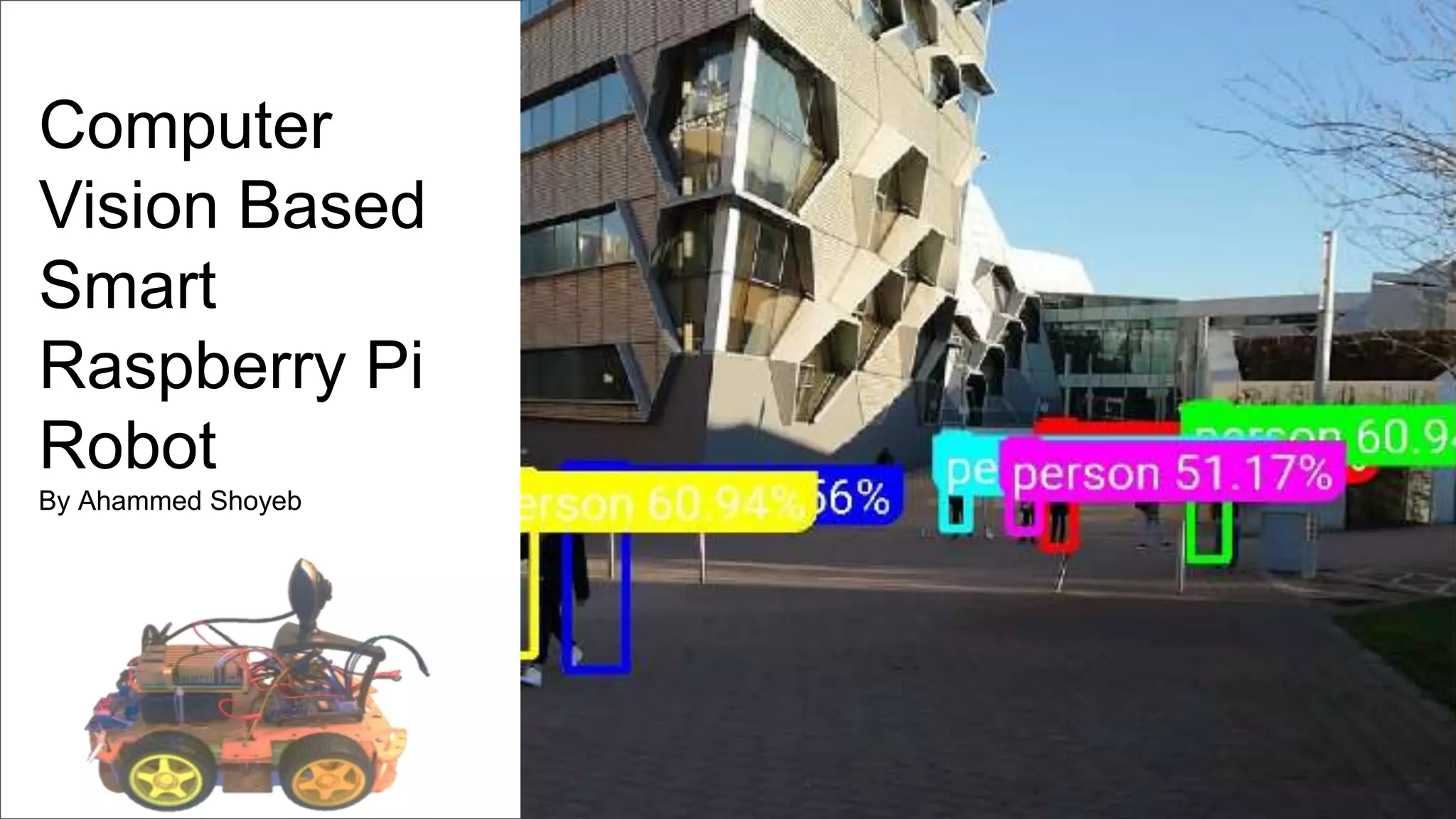
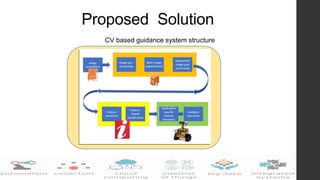
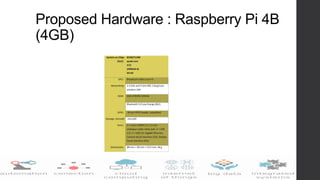
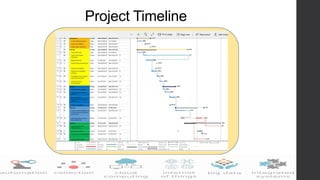
The document outlines the development of a computer vision-based autonomous robot utilizing a Raspberry Pi 4, emphasizing its efficiency and cost-effectiveness. The robot employs a convolutional neural network for object classification and navigation, successfully identifying targets and obstacles while maintaining specific distances. The project has achieved its objectives, resulting in a functional robotic guidance system with documented performance and plans for future enhancements.



![List of References
Bellis, M. (Jul. 3, 2019, thoughtco.com/definition-of-a-robot-1992364.) the
Definition of a Robot [online] available from <www.thoughtco.com/definition-of-a-
robot-1992364.> [11/10 2019]
Billingsley, J. e. and Brett, P. e. (2015) Machine Vision and Mechatronics in
Practice. 1st ed. 2015.. edn
Chaumette, F. (2015) Potential Problems of Unstability and Divergence in
Image-Based and Position-Based Visual Servoing.
Chesi, G. and Hung, Y. S. (2007) 'Global Path-Planning for Constrained and
Optimal Visual Servoing'. IEEE Transactions on Robotics 23 (5), 1050-1060
Dastur, J. and Khawaja, A. (2010) Robotic Arm Actuation with 7 DOF using Haar
Classifier Gesture Recognition.
Di Castro, M., Almagro, C. V., Lunghi, G., Marin, R., Ferre, M., and Masi, A.
(2018) Tracking-Based Depth Estimation of Metallic Pieces for Robotic Guidance.](https://image.slidesharecdn.com/wmgpresentation-200330195821/85/Computer-Vision-CV-based-Raspberry-Pi-robot-vehicle-30-320.jpg)