Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
brdk
PPTX, PDF
177 views
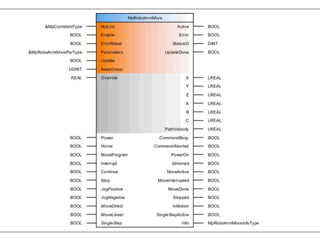
Comau robot
Comau robotten styres direkte fra PLC'en ved hjælp af mappRoboArm()
Automotive
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 2
2
/ 2
More Related Content
PPT
Robots in manufacturing
by
Anirudh Reddy
PDF
COMAU Master 2017 Brochure
by
fabrizio200
PDF
brochure summer school
by
Valerio Timo
PPTX
KUKA KR 360-3 (Six-Axis Industrial Robot for Wheel Assembly System)
by
Sharandhass Radakrishnan
PPT
Humanoid robot
by
Shiva Kalimikonda
PPTX
Robotic welding
by
Sridhar Raj
PPTX
Humanoid robots
by
Abhishek Sood
PPT
HUMANOID ROBOT PPT
by
Çhetáñ Âhírråö
Robots in manufacturing
by
Anirudh Reddy
COMAU Master 2017 Brochure
by
fabrizio200
brochure summer school
by
Valerio Timo
KUKA KR 360-3 (Six-Axis Industrial Robot for Wheel Assembly System)
by
Sharandhass Radakrishnan
Humanoid robot
by
Shiva Kalimikonda
Robotic welding
by
Sridhar Raj
Humanoid robots
by
Abhishek Sood
HUMANOID ROBOT PPT
by
Çhetáñ Âhírråö
Viewers also liked
PPTX
ATLAS(The Robot)
by
Rathika Rajasekar
PPTX
humanoid robot
by
Vandana Garg
PPTX
Humanoid robots
by
Tdjaqajgtpd
PPTX
ROBOTICS AND ITS APPLICATIONS
by
Anmol Seth
PPTX
robotics ppt
by
sivabenten1
PPTX
Robotics project ppt
by
Vundavalli Shreya
ATLAS(The Robot)
by
Rathika Rajasekar
humanoid robot
by
Vandana Garg
Humanoid robots
by
Tdjaqajgtpd
ROBOTICS AND ITS APPLICATIONS
by
Anmol Seth
robotics ppt
by
sivabenten1
Robotics project ppt
by
Vundavalli Shreya
More from brdk
PPTX
Sps2015BRHQ
by
brdk
PDF
Kanban short
by
brdk
PPTX
DHL Aarhus 2015
by
brdk
PPTX
Billeder fra DHL Odense 2015
by
brdk
PPTX
Billeder fra DHL Odense 11. august 2015
by
brdk
PPTX
Billeder fra DHL Odense 2015
by
brdk
PPTX
Safe modulesystem
by
brdk
PPTX
Find in Files
by
brdk
PPTX
automation++ - mapp intro
by
brdk
PPTX
Powerlink Cycle time
by
brdk
PPTX
TortoiseHg - Part2
by
brdk
PPTX
Pv mapping
by
brdk
PDF
B&R på kurs mod ekspansion og vækst.
by
brdk
PPTX
TortoiseHg – Part 1
by
brdk
PPTX
Ethernet - Target browser
by
brdk
PPTX
OPC UA
by
brdk
PPTX
HWgenkendelse
by
brdk
PPTX
automation++ - ARsim
by
brdk
PPTX
FTP access control
by
brdk
Sps2015BRHQ
by
brdk
Kanban short
by
brdk
DHL Aarhus 2015
by
brdk
Billeder fra DHL Odense 2015
by
brdk
Billeder fra DHL Odense 11. august 2015
by
brdk
Billeder fra DHL Odense 2015
by
brdk
Safe modulesystem
by
brdk
Find in Files
by
brdk
automation++ - mapp intro
by
brdk
Powerlink Cycle time
by
brdk
TortoiseHg - Part2
by
brdk
Pv mapping
by
brdk
B&R på kurs mod ekspansion og vækst.
by
brdk
TortoiseHg – Part 1
by
brdk
Ethernet - Target browser
by
brdk
OPC UA
by
brdk
HWgenkendelse
by
brdk
automation++ - ARsim
by
brdk
FTP access control
by
brdk
Download