This document discusses force vectors and their representation. It covers key topics such as:
- Scalars and vectors, and examples of each
- Classifying forces as distributed or concentrated, and contact or body forces
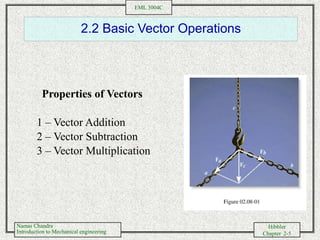
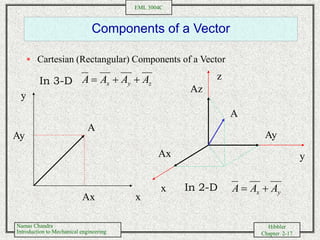
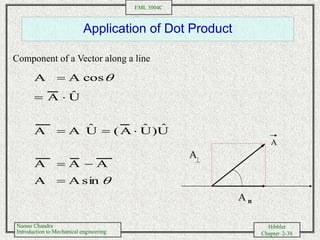
- Representing the direction and magnitude of a force vector using unit vectors
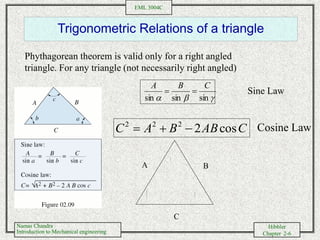
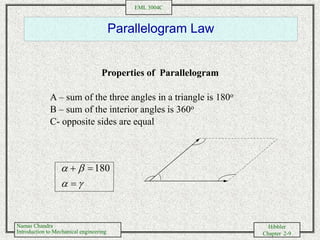
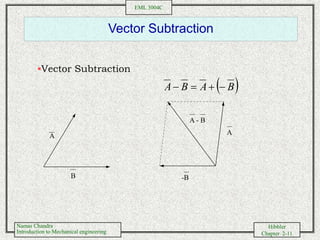
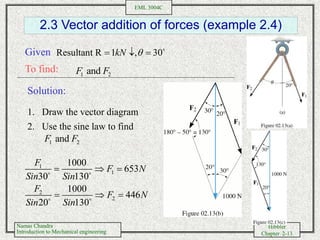
- Performing vector addition and subtraction of forces using trigonometric relationships and Cartesian components
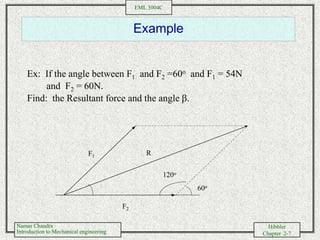
- Solving examples of adding and subtracting forces to determine the resultant force vector