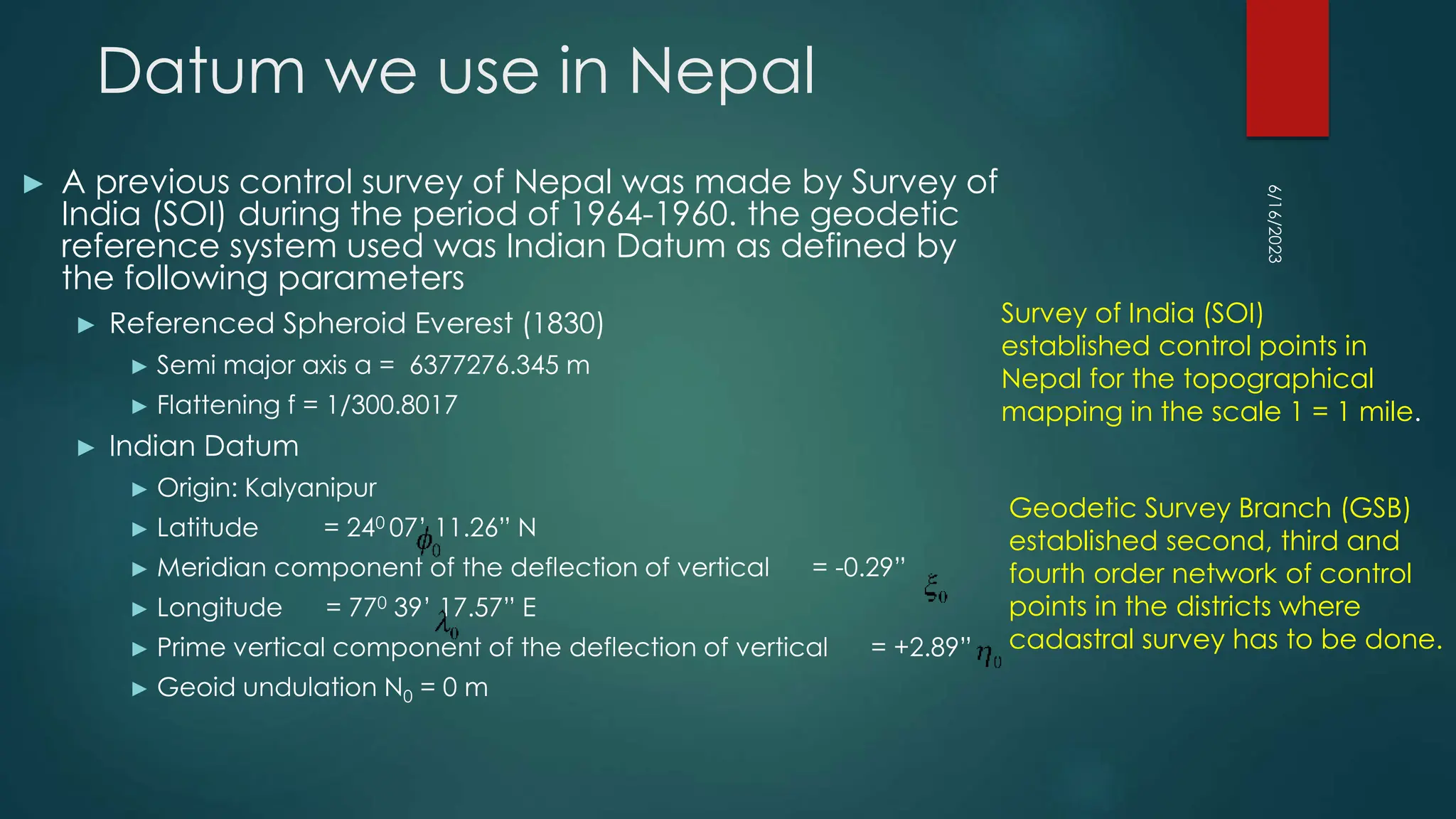
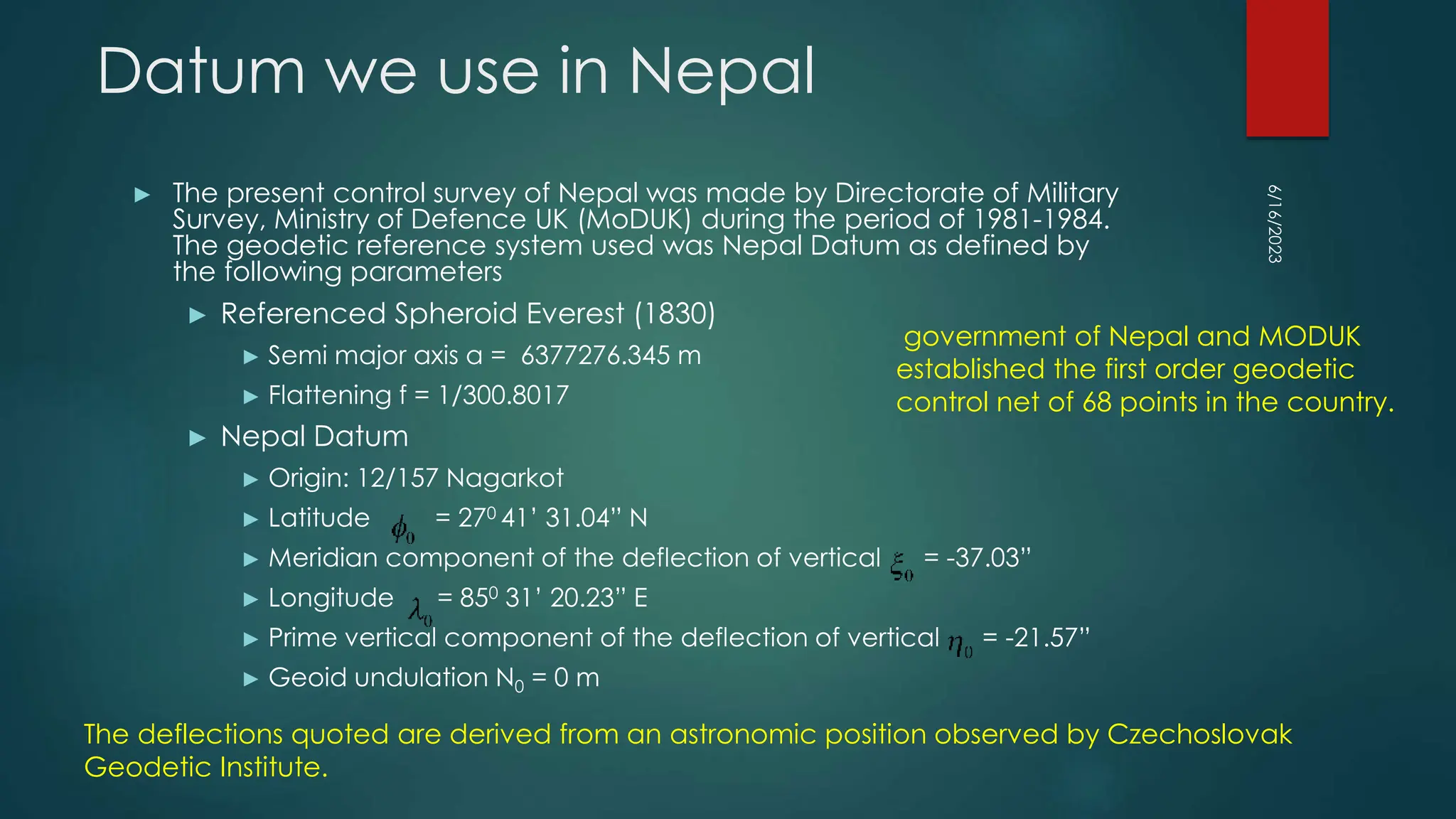
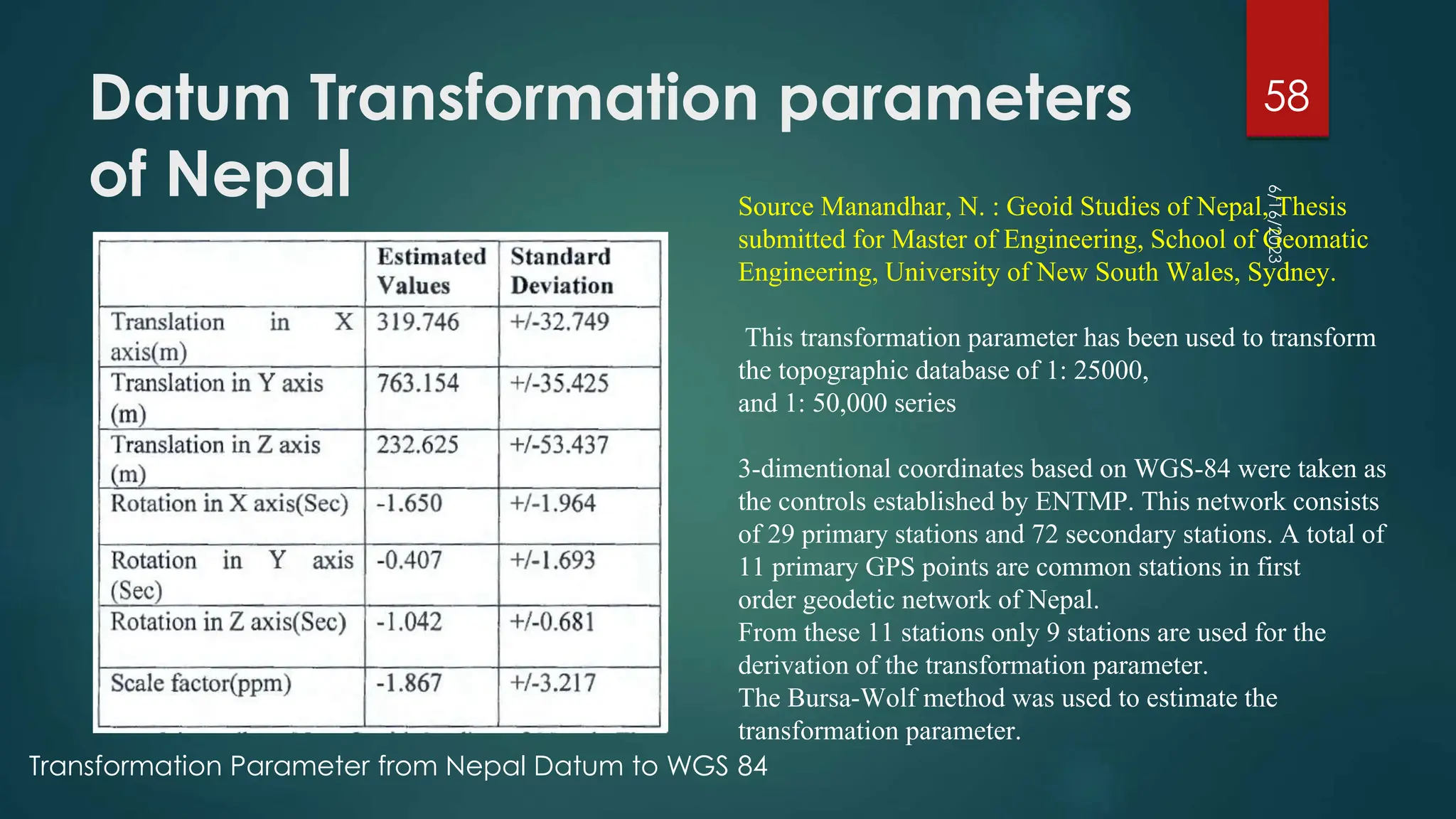
The document discusses various geodetic reference systems, including international terrestrial reference systems like WGS 84, and their importance for surveying, mapping, and infrastructure in Nepal. It covers the differences between local and global ellipsoids, the significance of mean sea level, and the implications of using incorrect datum. Additionally, it details the establishment of the Nepal datum and the transition from previous systems, emphasizing the need for accurate geodetic measurements.