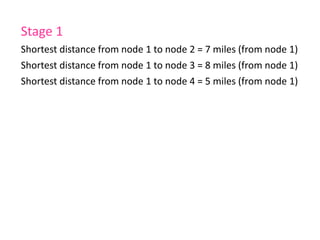
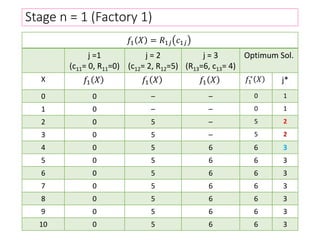
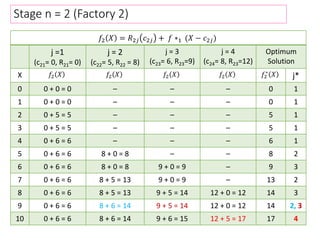
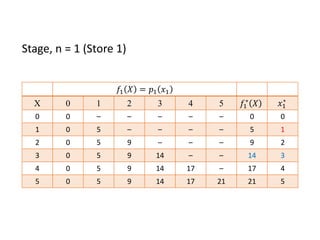
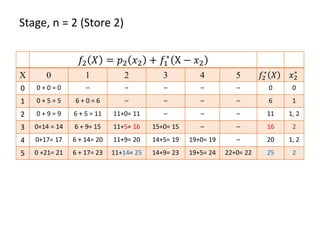
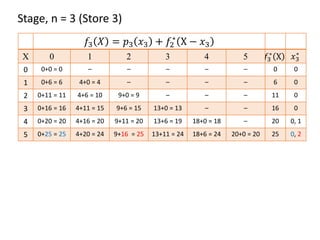
This document describes using dynamic programming to solve an optimization problem involving allocating crates of strawberries among three grocery stores. It presents the recursive equations to calculate the optimal profit from allocating various numbers of crates to each store. The optimal solution is to allocate 3 crates to store 1, 2 crates to store 2, and 0 crates to store 3, for a total maximum expected profit of 25.