Download to read offline



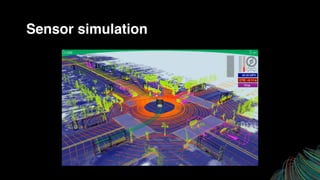
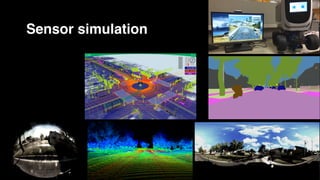
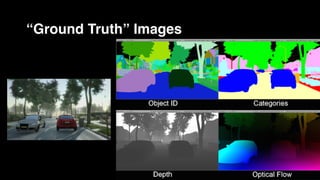
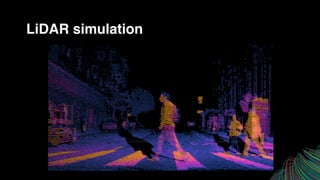
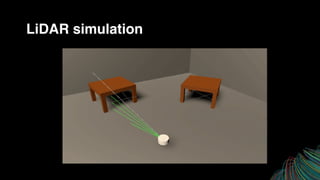
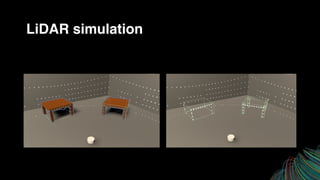
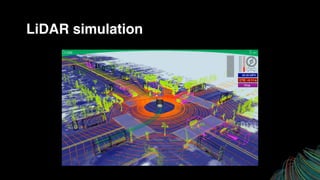

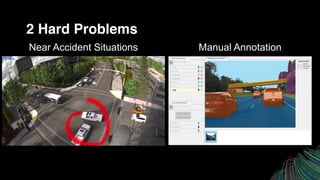
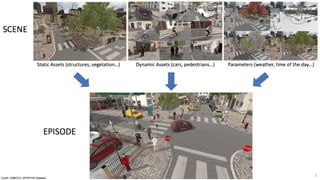
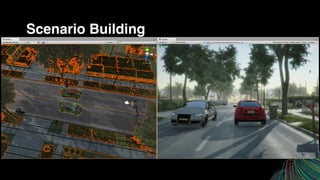
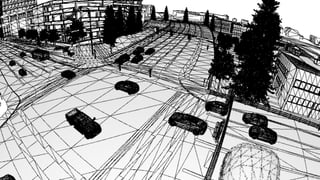
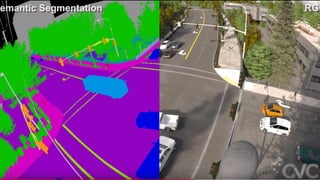
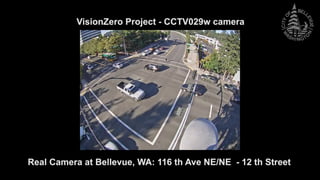
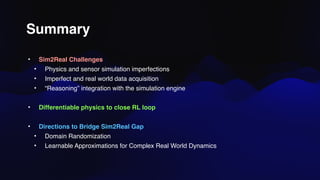

Tutorial Talk at Telluride Neuromorphic Cognition Workshop in 2025. Imperfections in dynamical systems, sensor simulation, imperfect data acquisition and real world noise hampers the usability of robotic simulations in the real world. The talk will introduce the common architecture behind the physical simulation engines and sensor simulation, as well as discuss the challenges balancing performance, speed and applicability to robotic simulations.