Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Kenji Urushima
28,728 views
Certificate TransparencyによるSSLサーバー証明書公開監査情報とその課題の議論
2015年6月12日に有志で行なったCertificate Transparencyに関する勉強会の資料です。
Technology
◦
Read more
28
Save
Share
Embed
Embed presentation
Download
Downloaded 60 times
1
/ 43
2
/ 43
Most read
3
/ 43
4
/ 43
5
/ 43
6
/ 43
7
/ 43
8
/ 43
9
/ 43
10
/ 43
11
/ 43
12
/ 43
13
/ 43
14
/ 43
15
/ 43
16
/ 43
17
/ 43
18
/ 43
19
/ 43
20
/ 43
21
/ 43
22
/ 43
23
/ 43
24
/ 43
25
/ 43
26
/ 43
27
/ 43
28
/ 43
29
/ 43
30
/ 43
31
/ 43
32
/ 43
33
/ 43
34
/ 43
35
/ 43
36
/ 43
37
/ 43
38
/ 43
39
/ 43
40
/ 43
41
/ 43
42
/ 43
43
/ 43
More Related Content
PDF
IDA,VC,DID関連仕様 最新情報 - OpenID BizDay #15
by
OpenID Foundation Japan
PDF
Gitの便利ワザ
by
ktateish
PDF
なぜOpenID Connectが必要となったのか、その歴史的背景
by
Tatsuo Kudo
PDF
これからのネイティブアプリにおけるOpenID Connectの活用
by
Masaru Kurahayashi
PDF
今なら間に合う分散型IDとEntra Verified ID
by
Naohiro Fujie
PPTX
DynamoDBによるソーシャルゲーム実装 How To
by
伊藤 祐策
PDF
はじめてのGit forデザイナー&コーダー
by
Saeko Yamamoto
PDF
がんばらなくても C# で Single Page Web アプリケーションが書けてしまう「Blazor」とは
by
Jun-ichi Sakamoto
IDA,VC,DID関連仕様 最新情報 - OpenID BizDay #15
by
OpenID Foundation Japan
Gitの便利ワザ
by
ktateish
なぜOpenID Connectが必要となったのか、その歴史的背景
by
Tatsuo Kudo
これからのネイティブアプリにおけるOpenID Connectの活用
by
Masaru Kurahayashi
今なら間に合う分散型IDとEntra Verified ID
by
Naohiro Fujie
DynamoDBによるソーシャルゲーム実装 How To
by
伊藤 祐策
はじめてのGit forデザイナー&コーダー
by
Saeko Yamamoto
がんばらなくても C# で Single Page Web アプリケーションが書けてしまう「Blazor」とは
by
Jun-ichi Sakamoto
What's hot
PDF
IaC事始め Infrastructure as Code やってみる?
by
大使 梶原
PDF
PostgreSQL のイケてるテクニック7選
by
Tomoya Kawanishi
PDF
実装して理解するLINE LoginとOpenID Connect入門
by
Naohiro Fujie
PDF
ELFの動的リンク
by
7shi
PDF
SpringBootTest入門
by
Yahoo!デベロッパーネットワーク
PPTX
5分で出来る!イケてるconfluenceページ
by
CLARA, Inc.
PDF
KeycloakのDevice Flow、CIBAについて
by
Hiroyuki Wada
PPTX
Prometheus入門から運用まで徹底解説
by
貴仁 大和屋
PDF
GitHubで雑誌・書籍を作る
by
Naonori Inao
PDF
react-scriptsはwebpackで何をしているのか
by
暁 三宅
PDF
OpenID Connect 入門 〜コンシューマーにおけるID連携のトレンド〜
by
Masaru Kurahayashi
PDF
MicrosoftのDID/VC実装概要
by
Naohiro Fujie
PDF
TLS, HTTP/2演習
by
shigeki_ohtsu
PDF
GoogleのSHA-1のはなし
by
MITSUNARI Shigeo
PDF
OpenID Connect入門
by
土岐 孝平
PDF
Microsoft Partner Network ガイドライン
by
Hiroyasu Sato
PDF
Hyperledger Aries 101
by
LFDT Tokyo Meetup
PDF
30分でわかるマイクロサービスアーキテクチャ 第2版
by
Naoki (Neo) SATO
PPTX
Hybrid Azure AD Join 動作の仕組みを徹底解説
by
Yusuke Kodama
PDF
EUDI wallets with OpenID for verifiable credentials (OID4VCI/OID4VP)
by
Lal Chandran
IaC事始め Infrastructure as Code やってみる?
by
大使 梶原
PostgreSQL のイケてるテクニック7選
by
Tomoya Kawanishi
実装して理解するLINE LoginとOpenID Connect入門
by
Naohiro Fujie
ELFの動的リンク
by
7shi
SpringBootTest入門
by
Yahoo!デベロッパーネットワーク
5分で出来る!イケてるconfluenceページ
by
CLARA, Inc.
KeycloakのDevice Flow、CIBAについて
by
Hiroyuki Wada
Prometheus入門から運用まで徹底解説
by
貴仁 大和屋
GitHubで雑誌・書籍を作る
by
Naonori Inao
react-scriptsはwebpackで何をしているのか
by
暁 三宅
OpenID Connect 入門 〜コンシューマーにおけるID連携のトレンド〜
by
Masaru Kurahayashi
MicrosoftのDID/VC実装概要
by
Naohiro Fujie
TLS, HTTP/2演習
by
shigeki_ohtsu
GoogleのSHA-1のはなし
by
MITSUNARI Shigeo
OpenID Connect入門
by
土岐 孝平
Microsoft Partner Network ガイドライン
by
Hiroyasu Sato
Hyperledger Aries 101
by
LFDT Tokyo Meetup
30分でわかるマイクロサービスアーキテクチャ 第2版
by
Naoki (Neo) SATO
Hybrid Azure AD Join 動作の仕組みを徹底解説
by
Yusuke Kodama
EUDI wallets with OpenID for verifiable credentials (OID4VCI/OID4VP)
by
Lal Chandran
Viewers also liked
PDF
第4回web技術勉強会 暗号技術編その2
by
tzm_freedom
PDF
第5回web技術勉強会 暗号技術編その3
by
tzm_freedom
PPTX
Analytics CloudとEmbulkを使った社会的データの分析
by
tzm_freedom
PPTX
私はここでつまづいた! Oracle database 11g から 12cへのアップグレードと Oracle Database 12c の新機能@201...
by
yoshimotot
PDF
第2回Web技術勉強会 webパフォーマンス改善編
by
tzm_freedom
PDF
qpstudy 2015.11.14 一歩先を行くインフラエンジニアに知ってほしいSSL/TLS
by
Kenji Urushima
PDF
第3回web技術勉強会 暗号技術編その1
by
tzm_freedom
PDF
いろいろなSSL/TLS設定ガイドライン (JNSA電子署名WG 実世界の暗号・認証技術勉強会資料)
by
Kenji Urushima
PDF
セキュリティ勉強会 暗号技術入門 1章
by
Naoko Suzuki
PDF
Bitcoinを技術的に理解する
by
Kenji Urushima
PDF
introduction to jsrsasign
by
Kenji Urushima
第4回web技術勉強会 暗号技術編その2
by
tzm_freedom
第5回web技術勉強会 暗号技術編その3
by
tzm_freedom
Analytics CloudとEmbulkを使った社会的データの分析
by
tzm_freedom
私はここでつまづいた! Oracle database 11g から 12cへのアップグレードと Oracle Database 12c の新機能@201...
by
yoshimotot
第2回Web技術勉強会 webパフォーマンス改善編
by
tzm_freedom
qpstudy 2015.11.14 一歩先を行くインフラエンジニアに知ってほしいSSL/TLS
by
Kenji Urushima
第3回web技術勉強会 暗号技術編その1
by
tzm_freedom
いろいろなSSL/TLS設定ガイドライン (JNSA電子署名WG 実世界の暗号・認証技術勉強会資料)
by
Kenji Urushima
セキュリティ勉強会 暗号技術入門 1章
by
Naoko Suzuki
Bitcoinを技術的に理解する
by
Kenji Urushima
introduction to jsrsasign
by
Kenji Urushima
Similar to Certificate TransparencyによるSSLサーバー証明書公開監査情報とその課題の議論
PDF
Certificate Transparency
by
Kazuhiro Nishiyama
PDF
『プロフェッショナルSSL/TLS』読書会3章
by
MITSUNARI Shigeo
PDF
脆弱性事例に学ぶセキュアコーディング「SSL/TLS証明書検証」編 (KOF2014)
by
JPCERT Coordination Center
PDF
Wp sslandroot certificate
by
Yoshida Yuri
PDF
脆弱性事例に学ぶセキュアコーディング「SSL/TLS証明書検証」編 (JavaDayTokyo2015)
by
JPCERT Coordination Center
PDF
SSL/TLSの基礎と最新動向
by
shigeki_ohtsu
PPTX
SSLの技術的な仕組みとサイトのSSL化について
by
ssuserb5e2a0
PDF
RFC7589(NETCONF Protocol over TLS)の勉強資料
by
Tetsuya Hasegawa
PPTX
エンジニアが知っておくべきSSL/TLSの知識(仮)
by
Masahiro NAKAYAMA
PDF
SSLの最新トレンド
by
J-Stream Inc.
PDF
『プロフェッショナルSSL/TLS』読書会4章
by
MITSUNARI Shigeo
PPT
Professional SSL/TLS Reading Chapter 6
by
Shogo Hayashi
PDF
プロフェッショナルSSL/TLS 1.2章
by
MITSUNARI Shigeo
PDF
Lessons (to be) Learned from Handling OpenSSL Vulnerabilities
by
JPCERT Coordination Center
PDF
Fluentd message forwarding with authentication and encryption
by
SATOSHI TAGOMORI
PDF
http2study 20160423 IETF95 Report
by
Kaoru Maeda
Certificate Transparency
by
Kazuhiro Nishiyama
『プロフェッショナルSSL/TLS』読書会3章
by
MITSUNARI Shigeo
脆弱性事例に学ぶセキュアコーディング「SSL/TLS証明書検証」編 (KOF2014)
by
JPCERT Coordination Center
Wp sslandroot certificate
by
Yoshida Yuri
脆弱性事例に学ぶセキュアコーディング「SSL/TLS証明書検証」編 (JavaDayTokyo2015)
by
JPCERT Coordination Center
SSL/TLSの基礎と最新動向
by
shigeki_ohtsu
SSLの技術的な仕組みとサイトのSSL化について
by
ssuserb5e2a0
RFC7589(NETCONF Protocol over TLS)の勉強資料
by
Tetsuya Hasegawa
エンジニアが知っておくべきSSL/TLSの知識(仮)
by
Masahiro NAKAYAMA
SSLの最新トレンド
by
J-Stream Inc.
『プロフェッショナルSSL/TLS』読書会4章
by
MITSUNARI Shigeo
Professional SSL/TLS Reading Chapter 6
by
Shogo Hayashi
プロフェッショナルSSL/TLS 1.2章
by
MITSUNARI Shigeo
Lessons (to be) Learned from Handling OpenSSL Vulnerabilities
by
JPCERT Coordination Center
Fluentd message forwarding with authentication and encryption
by
SATOSHI TAGOMORI
http2study 20160423 IETF95 Report
by
Kaoru Maeda
Certificate TransparencyによるSSLサーバー証明書公開監査情報とその課題の議論
1.
© 2015 Kenji
Urushima All rights reserved. Certificate Transparencyによる SSLサーバー証明書公開監査情報と その課題の議論 (資料公開版) Certificate Transparency有志勉強会 協賛:すみだセキュリティ勉強会/JNSA PKI相互運用WG 於:トレンドマイクロ株式会社(新宿)本社会議室 2015年6月12日(金) JNSA PKI相互運用WG 漆嶌賢二
2.
© 2015 Kenji
Urushima All rights reserved. • Certificate Transparency(CT)とは • Google ChromeでのCTの表示 • CTの構造 • CTの課題整理の議論 今日のアジェンダ
3.
Certificate Transparency って ご存知ですか?
4.
某S社、曰く 透かし入り証明書 某D社、曰く 証明書の透明性とか 透かし入り証明書とか 出典: http://www.digicert.ne.jp/topics/CertificateTransparency.html 出典: http://www.symantec.com/ja/jp/page.jsp?id=ssl-certificate-transparency
5.
Certificate Transparency とは 認証局が「ポカ」やって不正なSSL サーバー証明書が発行されたとしても、 それが「監査情報」を公開することに よって、その発行が正当なものかどう か判断できるようにする仕組みらしい。 「透かし入り証明書」などではなく、 「証明書発行監査の透明性(公開性)」とでも呼ぶべき
6.
Certificate Transparencyとは(2) ü 2011年、DigiCertやComodoなどで google.comドメイン不正証明書が 発行されイラクの通信が盗聴 その対策の一環として提案。 ü
2011年のGoogleの人の論文に基づく ü 実験RFC 6962になった(準拠不要?) ü Google Chromeのみが実験に対応 ü Chromeは1月〜EV証明書の必須要件に ü DigiCert, GlobalSignが先行対応 ü 他の海外認証ベンダも対応中 © 2015 Kenji Urushima All rights reserved.
7.
PKI解説サイトのImperialVioletで有名な Adam Langley氏の2011年の論文 参考出典:http://www.links.org/files/CertificateAuthorityTransparencyandAuditability.pdf DigiCert等の認証局の運用の誤りの問 題を受けて公表された論文 全ての認証局から発行される証明書に ついて、「本当に認証局が意図して発 行したのかという監査情報を公開する ようにし、利用者はこれを見て証明書 が正しく発行されたものか判断できる 仕組みの必要性を説いた。」 私見だが、CTの意義は今でも同意で きない。認証局は運用監査を受けてい るし、運用で誤った証明書なら失効す れば良いだけ。 → ただ、これが実 験RFCになり、実装までしてしまった。 © 2015
Kenji Urushima All rights reserved.
8.
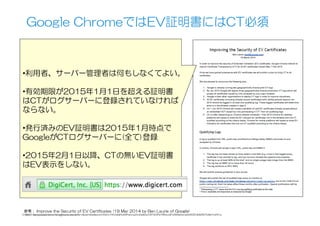
Google ChromeではEV証明書にはCT必須 参考: Improve
the Security of EV Certificates (19 Mar 2014 by Ben Laurie of Google) https://docs.google.com/a/google.com/viewer?a=v&pid=sites&srcid=ZGVmYXVsdGRvbWFpbnxjZXJ0aWZpY2F0ZXRyYW5zcGFyZW5jeXxneDo0ODhjNGRlOTIyMzYwNTcz • 利用者、サーバー管理者は何もしなくてよい。 • 有効期限が2015年1月1日を超える証明書 はCTがログサーバーに登録されていなければ ならない。 • 発行済みのEV証明書は2015年1月時点で GoogleがCTログサーバーに(全て)登録 • 2015年2月1日以降、CTの無いEV証明書 はEV表示をしない。 © 2015 Kenji Urushima All rights reserved.
9.
目に見える Certificate Transparencyとは (Chrome、DigiCert等が対応) © 2015
Kenji Urushima All rights reserved.
10.
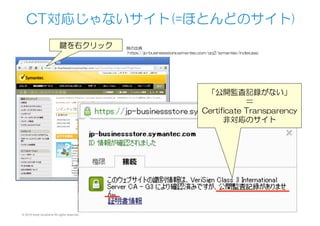
CT対応じゃないサイト(=ほとんどのサイト) 例の出典 https://jp-businessstore.symantec.com/qq2/symantec/index.asp 鍵を右クリック 「公開監査記録がない」 = Certificate Transparency 非対応のサイト ©
2015 Kenji Urushima All rights reserved.
11.
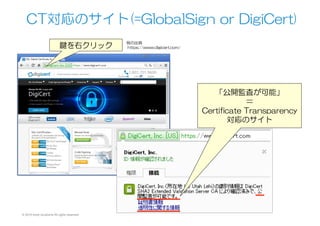
CT対応のサイト(=GlobalSign or DigiCert) 例の出典
https://www.digicert.com/鍵を右クリック 「公開監査が可能」 = Certificate Transparency 対応のサイト © 2015 Kenji Urushima All rights reserved.
12.
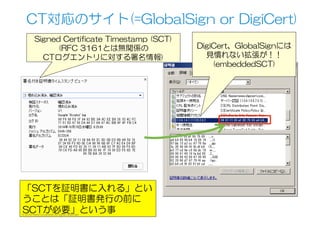
CT対応のサイト(=GlobalSign or DigiCert) Signed
Certificate Timestamp (SCT) (RFC 3161とは無関係の CTログエントリに対する署名情報) DigiCert、GlobalSignには 見慣れない拡張が!! (embeddedSCT) 「SCTを証明書に入れる」とい うことは「証明書発行の前に SCTが必要」という事© 2015 Kenji Urushima All rights reserved.
13.
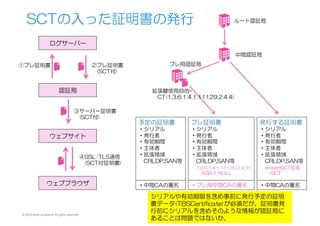
SCTの入った証明書の発行 プレ証明書 ・シリアル ・発行者 ・有効期間 ・主体者 ・拡張領域 CRLDP,SAN等
1.3.6.1.4.1.11129..2.4.3= ASN.1 NULL ・プレ用中間CAの署名 予定の証明書 ・シリアル ・発行者 ・有効期間 ・主体者 ・拡張領域 CRLDP,SAN等 ・中間CAの署名 シリアルや有効期限を含め事前に発行予定の証明 書データ(TBSCertificate)が必須だが、証明書発 行前にシリアルを含めそのような情報が認証局に あることは問題ではないか。 ルート認証局 発行する証明書 ・シリアル ・発行者 ・有効期間 ・主体者 ・拡張領域 CRLDP,SAN等 embedSCT拡張 =SCT ・中間CAの署名 中間認証局 プレ用認証局 拡張鍵使用目的= CT(1.3.6.1.4.1.11129.2.4.4) © 2015 Kenji Urushima All rights reserved. ログサーバー 認証局 ウェブサイト ウェブブラウザ ①プレ証明書 ②プレ証明書 (SCT付) ③サーバー証明書 (SCT付) ④SSL/TLS通信 (SCT付証明書)
14.
世界に配置された CTログサーバー(リポジトリ) © 2015 Kenji
Urushima All rights reserved.
15.
© 2015 Kenji
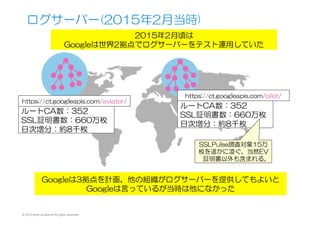
Urushima All rights reserved. ログサーバー(2015年2月当時) 2015年2月頃は Googleは世界2拠点でログサーバーをテスト運用していた Googleは3拠点を計画、他の組織がログサーバーを提供してもよいと Googleは言っているが当時は他になかった https://ct.googleapis.com/pilot/ https://ct.googleapis.com/aviator/ ルートCA数:352 SSL証明書数:660万枚 日次増分:約8千枚 ルートCA数:352 SSL証明書数:660万枚 日次増分:約8千枚 SSLPulse調査対象15万 枚を遥かに凌ぐ。当然EV 証明書以外も含まれる。
16.
© 2015 Kenji
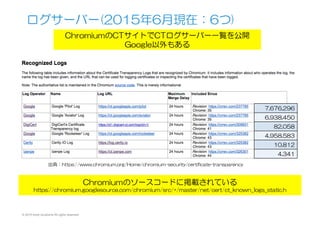
Urushima All rights reserved. ログサーバー(2015年6月現在:6つ) ChromiumのCTサイトでCTログサーバー一覧を公開 Google以外もある 7,676,296 6,938,450 82,058 4,958,583 10,812 4,341 出典:https://www.chromium.org/Home/chromium-security/certificate-transparency Chromiumのソースコードに掲載されている https://chromium.googlesource.com/chromium/src/+/master/net/cert/ct_known_logs_static.h
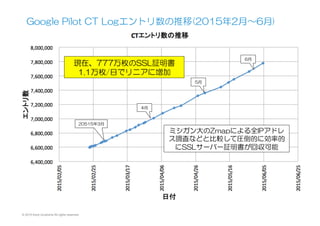
17.
© 2015 Kenji
Urushima All rights reserved. Google Pilot CT Logエントリ数の推移(2015年2月〜6月) 現在、777万枚のSSL証明書 1.1万枚/日でリニアに増加 ミシガン大のZmapによる全IPアドレ ス調査などと比較して圧倒的に効率的 にSSLサーバー証明書が回収可能 20515年3月 4月 5月 6月
18.
CTログの構成要素 © 2015 Kenji
Urushima All rights reserved.
19.
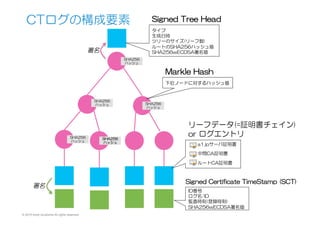
© 2015 Kenji
Urushima All rights reserved. CTログの構成要素 SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ a1.jpサーバ証明書 中間CA証明書 ルートCA証明書 リーフデータ(=証明書チェイン) or ログエントリ Signed Certificate TimeStamp (SCT) ID番号 ログ名/ID 監査時刻(登録時刻) SHA256wECDSA署名値 署名 Signed Tree Head タイプ 生成日時 ツリーのサイズ(リーフ数) ルートのSHA256ハッシュ値 SHA256wECDSA署名値 Markle Hash 下位ノードに対するハッシュ値 署名
20.
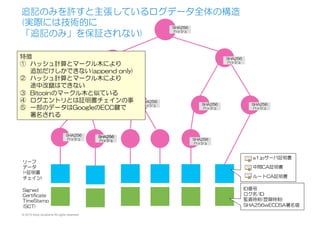
© 2015 Kenji
Urushima All rights reserved. 追記のみを許すと主張しているログデータ全体の構造 (実際には技術的に 「追記のみ」を保証されない) SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ a1.jpサーバ証明書 中間CA証明書 ルートCA証明書 特徴 ① ハッシュ計算とマークル木により 追加だけしかできない(append only) ② ハッシュ計算とマークル木により 途中改竄はできない ③ Bitcoinのマークル木と似ている ④ ログエントリとは証明書チェインの事 ⑤ 一部のデータはGoogleのECC鍵で 署名される リーフ データ (=証明書 チェイン) Signed Certificate TimeStamp (SCT) ID番号 ログ名/ID 監査時刻(登録時刻) SHA256wECDSA署名値 SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ SHA256 ハッシュ
21.
CTのマークルハッシュ木 © 2015 Kenji
Urushima All rights reserved.
22.
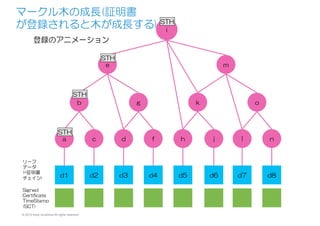
© 2015 Kenji
Urushima All rights reserved. マークル木の成長(証明書 が登録されると木が成長する) i e a d1 b c d2 リーフ データ (=証明書 チェイン) Signed Certificate TimeStamp (SCT) d d3 f d4 m k h d5 j d6 o l d7 n d8 g 登録のアニメーション STH STH STH STH
23.
© 2015 Kenji
Urushima All rights reserved. Markle Audit Path(マークル監査パス)とは o nm i j k l a b c d e d0 d1 d2 d3 d4 リーフデータ (=証明書チェイン) f d5 g d6 h d7 Pathとはリーフデータが木に含 まれていることを証明するため のノードハッシュ値のリスト 例えばリーフd3が含まれ ることを証明したいとする とき、Pathは[c, i, n]とな り、[c, i, n]とd3さえあれ ば下から順にルートハッ シュを計算できる。 ① d3からdを計算できる ② c、dからj ③ i、jからm ④ m、nからルートo 別途与えられるルートハッ シュと一致すれば、d3は 木に含まれる証明となる。
24.
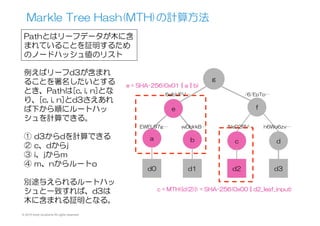
© 2015 Kenji
Urushima All rights reserved. Markle Tree Hash(MTH)の計算方法 g fe a b c d d0 d1 d2 d3 EWEL97g… ①子供が2ついるノード ②子供にリーフを1つ持つ 末端ノード この2つでハッシュ値の計 算方法が違う wDblrkB… /NeD2RV… h6Wo6zv… /6/EpTp…6eIbVFV… c = MTH({d(2)}) = SHA-256(0x00 || d2_leaf_input) e = SHA-256(0x01 || a || b)
25.
© 2015 Kenji
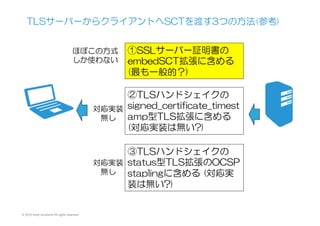
Urushima All rights reserved. TLSサーバーからクライアントへSCTを渡す3つの方法(参考) ①SSLサーバー証明書の embedSCT拡張に含める (最も一般的?) ②TLSハンドシェイクの signed_certificate_timest amp型TLS拡張に含める (対応実装は無い?) ③TLSハンドシェイクの status型TLS拡張のOCSP staplingに含める (対応実 装は無い?) ほぼこの方式 しか使わない 対応実装 無し 対応実装 無し
26.
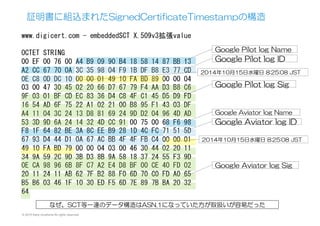
www.digicert.com - embeddedSCT
X.509v3拡張value OCTET STRING 00 EF 00 76 00 A4 B9 09 90 B4 18 58 14 87 BB 13 A2 CC 67 70 0A 3C 35 98 04 F9 1B DF B8 E3 77 CD 0E C8 0D DC 10 00 00 01 49 10 FA BD 89 00 00 04 03 00 47 30 45 02 20 66 D7 67 79 F4 AA D3 B8 C6 9F 03 01 BF CD EC 83 36 D4 C8 4F C1 45 D5 D9 FD 16 54 AD 6F 75 22 A1 02 21 00 B8 95 F1 43 03 DF A4 11 04 3C 24 13 D8 81 69 24 9D D2 04 96 4D AD 53 3D 9D 6A 24 14 32 4D CC 91 00 75 00 68 F6 98 F8 1F 64 82 BE 3A 8C EE B9 28 1D 4C FC 71 51 5D 67 93 D4 44 D1 0A 67 AC BB 4F 4F FB C4 00 00 01 49 10 FA BD 79 00 00 04 03 00 46 30 44 02 20 11 34 9A 59 2C 9D 3B D3 8B 9A 58 18 37 24 55 F3 9D 0E CA 98 96 6B 8F C7 A2 E4 D8 BF 00 CE 40 FD 02 20 11 24 11 AB 62 7F B2 88 F0 6D 70 C0 FD A0 65 B5 B6 03 46 1F 10 30 ED F5 6D 7E 89 7B BA 20 32 64 Google Pilot log Name Google Pilot log ID Google Aviator log Name Google Aviator log ID Google Pilot log Sig Google Aviator log Sig 2014年10月15日水曜日 8:25:08 JST 2014年10月15日水曜日 8:25:08 JST 証明書に組込まれたSignedCertificateTimestampの構造 なぜ、SCT等一連のデータ構造はASN.1になっていた方が取扱いが容易だった © 2015 Kenji Urushima All rights reserved.
27.
© 2015 Kenji
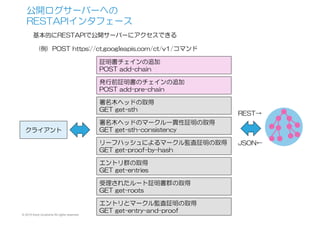
Urushima All rights reserved. 公開ログサーバーへの RESTAPIインタフェース 基本的にRESTAPIで公開サーバーにアクセスできる (例) POST https://ct.googleapis.com/ct/v1/コマンド クライアント 証明書チェインの追加 POST add-chain 発行前証明書のチェインの追加 POST add-pre-chain 署名木ヘッドの取得 GET get-sth 署名木ヘッドのマークル一貫性証明の取得 GET get-sth-consistency リーフハッシュによるマークル監査証明の取得 GET get-proof-by-hash エントリ群の取得 GET get-entries 受理されたルート証明書群の取得 GET get-roots エントリとマークル監査証明の取得 GET get-entry-and-proof REST→ JSON←
28.
© 2015 Kenji
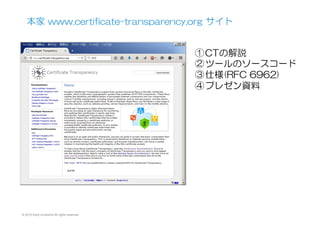
Urushima All rights reserved. 本家 www.certificate-transparency.org サイト ① CTの解説 ② ツールのソースコード ③ 仕様(RFC 6962) ④ プレゼン資料
29.
© 2015 Kenji
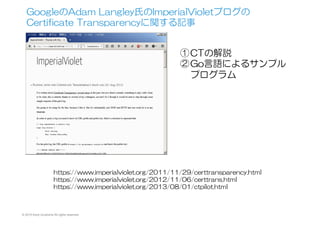
Urushima All rights reserved. GoogleのAdam Langley氏のImperialVioletブログの Certificate Transparencyに関する記事 ① CTの解説 ② Go言語によるサンプル プログラム https://www.imperialviolet.org/2011/11/29/certtransparency.html https://www.imperialviolet.org/2012/11/06/certtrans.html https://www.imperialviolet.org/2013/08/01/ctpilot.html
30.
Certificate Transparencyの 課題整理(議論) © 2015
Kenji Urushima All rights reserved. ① そもそも信頼できる監査情報なのか? ② 仕組み/データとして信頼できるのか? ③ プライバシー懸念があるのでは?
31.
© 2015 Kenji
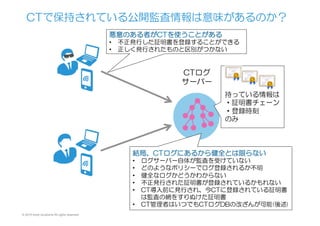
Urushima All rights reserved. CTで保持されている公開監査情報は意味があるのか? 持っている情報は ・証明書チェーン ・登録時刻 のみ CTログ サーバー 悪意のある者がCTを使うことがある • 不正発行した証明書を登録することができる • 正しく発行されたものと区別がつかない 結局、CTログにあるから健全とは限らない • ログサーバー自体が監査を受けていない • どのようなポリシーでログ登録されるか不明 • 健全なログかどうかわからない • 不正発行された証明書が登録されているかもれない • CT導入前に発行され、今CTに登録されている証明書 は監査の網をすりぬけた証明書 • CT管理者はいつでもCTログDBの改ざんが可能(後述)
32.
© 2015 Kenji
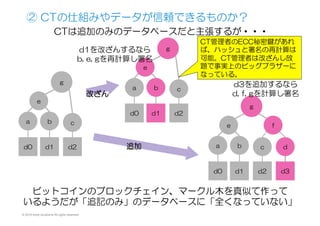
Urushima All rights reserved. ② CTの仕組みやデータが信頼できるものか? ビットコインのブロックチェイン、マークル木を真似て作って いるようだが「追記のみ」のデータベースに「全くなっていない」 g e a b c d0 d1 d2 CTは追加のみのデータベースだと主張するが・・・ g fe a b c d d0 d1 d2 d3 g e a b c d0 d1 d2 d1を改ざんするなら b, e, gを再計算し署名 d3を追加するなら d, f, gを計算し署名 CT管理者のECC秘密鍵があれ ば、ハッシュと署名の再計算は 可能。CT管理者は改ざんし放 題で事実上のビッグブラザーに なっている。 改ざん 追加
33.
© 2015 Kenji
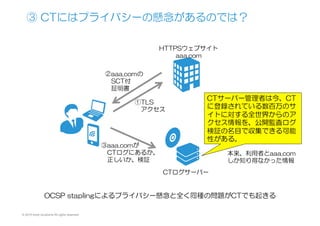
Urushima All rights reserved. ③ CTにはプライバシーの懸念があるのでは? HTTPSウェブサイト aaa.com CTログサーバー ①TLS アクセス ②aaa.comの SCT付 証明書 ③aaa.comが CTログにあるか、 正しいか、検証 CTサーバー管理者は今、CT に登録されている数百万のサ イトに対する全世界からのア クセス情報を、公開監査ログ 検証の名目で収集できる可能 性がある。 本来、利用者とaaa.com しか知り得なかった情報 OCSP staplingによるプライバシー懸念と全く同種の問題がCTでも起きる
34.
© 2015 Kenji
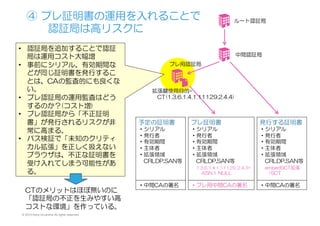
Urushima All rights reserved. ④ プレ証明書の運用を入れることで 認証局は高リスクに プレ証明書 ・シリアル ・発行者 ・有効期間 ・主体者 ・拡張領域 CRLDP,SAN等 1.3.6.1.4.1.11129..2.4.3= ASN.1 NULL ・プレ用中間CAの署名 予定の証明書 ・シリアル ・発行者 ・有効期間 ・主体者 ・拡張領域 CRLDP,SAN等 ・中間CAの署名 ルート認証局 発行する証明書 ・シリアル ・発行者 ・有効期間 ・主体者 ・拡張領域 CRLDP,SAN等 embedSCT拡張 =SCT ・中間CAの署名 中間認証局 プレ用認証局 拡張鍵使用目的= CT(1.3.6.1.4.1.11129.2.4.4) • 認証局を追加することで認証 局は運用コスト大幅増 • 事前にシリアル、有効期間な どが同じ証明書を発行するこ とは、CAの監査的にも良くな い。 • プレ認証局の運用監査はどう するのか?(コスト増) • プレ認証局から「不正証明 書」が発行されるリスクが非 常に高まる。 • パス検証で「未知のクリティ カル拡張」を正しく扱えない ブラウザは、不正な証明書を 受け入れてしまう可能性があ る。 CTのメリットはほぼ無いのに 「認証局の不正を生みやすい高 コストな環境」を作っている。
35.
© 2015 Kenji
Urushima All rights reserved. ⑤ (追記)CTに関する最新の動向(2016.06.24) • RFC 6962bis – Certificate Transparencyが準備され始めていている • https://datatracker.ietf.org/doc/draft-ietf-trans-rfc6962-bis/ • CT運用の十分な実績、実装ができたためExperimentalから Standard Trackに移すことを画策している • Standard Trackになったら、すべてのブラウザ、すべてのサーバー がこれに対応していく方向になる • 次のiOS9でCertificate Transparencyをサポートすると公表した http://gizmodo.com/one-big-list-of-the-new-privacy-and-security-features-i-1710332864 https://twitter.com/FredericJacobs/status/608003625617604608 • Chromeだけでなく、他のブラウザも対応し始めた さらに、とてもまずい状況になった
36.
© 2015 Kenji
Urushima All rights reserved. (参考) Chromium Forumでの議論 Google Chromium開発のSecurity/ Crypto TeamのRyan Sleeviのフォー ラム投稿 • 同じChroiumベースのOperaからの CTに対する批判を受けたもの • 「Googleに悪意が無いこと」を9 ページに渡る長文で弁明したが、論 点がはっきりせず、健全に運用され ていること、信頼できる仕組みであ ることは証明されていないようだ。 https://groups.google.com/a/chromium.org/forum/ #!msg/ct-policy/Udh1ddi1MrY/Ij-p0o1mP5gJ
37.
© 2015 Kenji
Urushima All rights reserved. 不完全なChromiumのCT Logの運用ポリシー Google Chromiumプロジェクトには CTログのポリシーが定められている が • 認証局はPwCなど必要な外部 運用監査をしているが • CTについては何もシステム監査 するつもりは無さそう • 精神論で「完全性を維持」と言って いるだけで、誰もその運用を担保で きない。 • 正しく運用されていた事を示す方法 がない。 • CTのEC鍵管理も不明確 https://www.chromium.org/Home/chromium- security/certificate-transparency/log-policy
38.
© 2015 Kenji
Urushima All rights reserved. (参考)IETFのCT wikiページ 出典:http://trac.tools.ietf.org/wg/trans/trac/wiki 今は大した情報はないが今後に期待??? (CT検索系のオンラインツールが整備されそう)
39.
© 2015 Kenji
Urushima All rights reserved. (参考)ChromiumのCT関連ソースコード 出典:https://chromium.googlesource.com/ chromium/src/+/master/net/cert ct_*.[ch] • 6つのサーバー用のECC公開鍵などある • 検証はあまりまともに実装されてなさそう
40.
© 2015 Kenji
Urushima All rights reserved. 主張 Certificate Transparencyは仕組 み的にも、運用的にも「証明書の有 効性」などの何かを証明できるよう な仕組みにはなっていない。そのよ うな仕組みを信頼の起点とするのは、 非常に問題があるのではないか。
41.
ご清聴ありがとうございました
42.
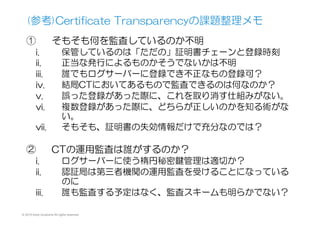
(参考)Certificate Transparencyの課題整理メモ ①
そもそも何を監査しているのか不明 i. 保管しているのは「ただの」証明書チェーンと登録時刻 ii. 正当な発行によるものかそうでないかは不明 iii. 誰でもログサーバーに登録でき不正なもの登録可? iv. 結局CTにおいてあるもので監査できるのは何なのか? v. 誤った登録があった際に、これを取り消す仕組みがない。 vi. 複数登録があった際に、どちらが正しいのかを知る術がな い。 vii. そもそも、証明書の失効情報だけで充分なのでは? ② CTの運用監査は誰がするのか? i. ログサーバーに使う楕円秘密鍵管理は適切か? ii. 認証局は第三者機関の運用監査を受けることになっている のに iii. 誰も監査する予定はなく、監査スキームも明らかでない? © 2015 Kenji Urushima All rights reserved.
43.
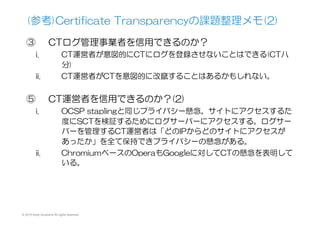
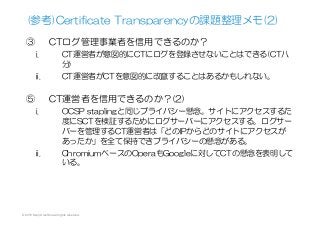
(参考)Certificate Transparencyの課題整理メモ(2) ③ CTログ管理事業者を信用できるのか? i.
CT運営者が意図的にCTにログを登録させないことはできる(CT八 分) ii. CT運営者がCTを意図的に改竄することはあるかもしれない。 ⑤ CT運営者を信用できるのか?(2) i. OCSP staplingと同じプライバシー懸念。サイトにアクセスするた 度にSCTを検証するためにログサーバーにアクセスする。ログサー バーを管理するCT運営者は「どのIPからどのサイトにアクセスが あったか」を全て保持できプライバシーの懸念がある。 ii. ChromiumベースのOperaもGoogleに対してCTの懸念を表明して いる。 © 2015 Kenji Urushima All rights reserved.
Download




![© 2015 Kenji Urushima All rights reserved.
Markle Audit Path(マークル監査パス)とは
o
nm
i j k l
a b c d e
d0 d1 d2 d3 d4
リーフデータ
(=証明書チェイン)
f
d5
g
d6
h
d7
Pathとはリーフデータが木に含
まれていることを証明するため
のノードハッシュ値のリスト
例えばリーフd3が含まれ
ることを証明したいとする
とき、Pathは[c, i, n]とな
り、[c, i, n]とd3さえあれ
ば下から順にルートハッ
シュを計算できる。
① d3からdを計算できる
② c、dからj
③ i、jからm
④ m、nからルートo
別途与えられるルートハッ
シュと一致すれば、d3は
木に含まれる証明となる。](https://image.slidesharecdn.com/ct201506120941-150623143728-lva1-app6891/85/Certificate-Transparency-SSL-23-320.jpg)

![© 2015 Kenji Urushima All rights reserved.
(参考)ChromiumのCT関連ソースコード
出典:https://chromium.googlesource.com/
chromium/src/+/master/net/cert
ct_*.[ch]
• 6つのサーバー用のECC公開鍵などある
• 検証はあまりまともに実装されてなさそう](https://image.slidesharecdn.com/ct201506120941-150623143728-lva1-app6891/85/Certificate-Transparency-SSL-39-320.jpg)