1. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
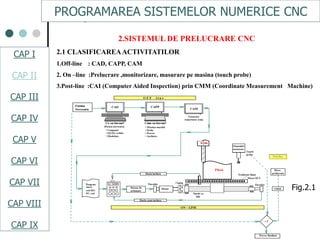
2.SISTEMUL DE PRELUCRARE CNC
2.1 CLASIFICAREAACTIVITATILOR
1.Off-line : CAD, CAPP, CAM
2. On –line :Prelucrare ,monitorizare, masurare pe masina (touch probe)
3.Post-line :CAI (Computer Aided Inspection) prin CMM (Coordinate Measurement Machine)
PROGRAMAREA SISTEMELOR NUMERICE CNC
Fig.2.1
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
2. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.1.1 ACTIVITATI OFF-LINE
Scop : generarea programului sursa de prelucrare pe masina CNC
Etape :
1. Desenul piesei pe baza caruia se genereaza Modelul geometric in 2D/3D, CAD
2.Generarea informatiilor necesare prelucrarii: itinerarul tehnologic, alegerea
masinii-unelte, a sculelor, a dispozitivelor si a parametrilor de aschiere, CAPP;
3.Realizarea programului sursa de prelucrare: generarea traiectoriei sculei pe
baza informatiilor CAD, CAPP, CAM.
Se urmareste:
-eliminarea interferentelor sculei cu piesa , dispozitive etc.
-minimizarea timpului de prelucrare.
CAM important pentru generarea traiectoriilor pe m-u cu 4-5 axe.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
3. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.1.2 ACTIVITATI ON-LINE
Scopul: realizarea fizica a piesei
In aceasta faza echipamentul CNC citeste programul de prelucrare, il memoreaza si
initiaza comenzile pentru deplasarea sculei :
-pozitia sculei
-contolul vitezei
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
4. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.1.3 ACTIVITATI POST-LINE
Scop : compararea geometriei piesei realizate cu a modelului
Se desfasoara dupa procesul de prelucrare
Activitatea se deruleaza in cadrul CAI. Se utilizeaza o masina de masurat in coordonate CMM
STEP NC
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
6. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.2 COMPONENTELE SISTEMULUI DE ACTIONARE
Fig.2.11
Mecanismul de actionare servo cuprinde:
-servomotorul
-mecanismul pentru transmiterea puterii.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
8. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
BUCLE DE CONTROL
Fig.2.13
Bucla semi inchisa
Reprezinta solutia cea mai raspandita .Encoderul , cu rol de detector de pozitie, evidentiaza
pozitia unghiulara a surubului cu bile (SB).
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
9. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Bucla inchisa:
Fig.2.14
Presupune utilizarea unui traductor linear pentru masurarea deplasarii lineare a mesei. Precizia
surubului cu bile nu influenteaza precizia de pozitionare.
PROGRAMAREA SISTEMELOR NUMERICE CNC
ε
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
10. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Bucla hibrida
Fig.2.15
Se recomanda in situatiile in care este necesar un castig mai mic ( fara a se putea spori rigiditatea
proportional cu greutatea elementelor in miscare sau reduce pierderea de miscare).
Cazul masinilor –unelte grele.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
11. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.3 COMPONENTELE UNUI SISTEM CNC
In general un sistem CNC se compune din trei componente:
-unuitatea NC care asigura interfata utilizator si realizeaza controlul pozitiei;
-motorul de actionare
-unitatea de actionare
In sens ingust numai unitatea NC este denumita sistem CNC.
Din punct de vedere functional sistemul CNC cuprinde: unitatea MMI (Man Machine
Interface), unitatea NCK (Kernel NC) si unitatea PLC (Programmable Logic Control)
PROGRAMAREA SISTEMELOR NUMERICE CNC
NCK
MMI
PLC
Fig.2.16
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
12. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
MMI:-asigura interfata utilizator/echipament NC;
- executa comenzi de operare a masinii;
- afiseaza starea masinii;
- realizeaza functii de editare a programului piesa;
- comunicare;
NCK:- interpreteaza programul;
- executa operatiile de interpolare;
- realizeaza controlul pozitiei;
- compenseaza erorile;
- controleaza servosistemul de actionare;
PLC:- controleaza secventele de schimbare a sculei;
- a vitezei (turatiei);
- schimbarea piesei;
- asigura semnale pentru porturile IN/OUT;
- controleaza comportamentul general al masinii, cu exceptia servoactionarii
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
14. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.3.2 FUNCTII MMI
Asigura operarea generala a masiniii de catre operator.
Principalele categorii de functii (5):
1.Functii de operare: asigura operarea masinii si afisarea starii acesteia (cota programata,
efectuata, rest, corectiile active, parametrii tehnologici nume program/subprogram , regimul de
lucru –MDI, FRAZA CU FRAZA, AUTOMAT EDITARE ETC)
PROGRAMAREA SISTEMELOR NUMERICE CNC
Fig.2.19
Fig.2.18
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
15. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
FUNCTII MMI
2.Functii pentru setarea parametrilor- pentru utilizare interna sunt 3 categorii:
-parametrii masina pentru setarea reglarii masinii, a sistemului de actionare, corectii de
scula,sistemul de coordinate;
-parametrii utilizati in programele de prelucrare;
-parametrii de adaptare, utilizati pentru adaptarea sistemului la cerintele utilizatorului.
PROGRAMAREA SISTEMELOR NUMERICE CNC
Fig.2.20
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
16. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
FUNCTII MMI
3.Functii de editare program -se utilizeaza pentru editarea/modificarea programelor de
prelucrare. Limbajul conversational.
4. Functii de monitorizare si alarma CNC informeaza utilizatorul despre starea Masinii prin
monitorizare
5. Functii service sunt utilizate pentru a oferii asistenta utilizatorului. Tele-service, functia DNC.
PROGRAMAREA SISTEMELOR NUMERICE CNC
Fig.2.21
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
17. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.3.4 FUNCTII NCK
Procesorul central al ECN indeplineste trei functii importante:
-controleaza pozitia organelor in miscare
- realizeaza interpolarea prin controlul servo-actionarii
- interpreteaza codurile din programul de prelucrare.
1. Functia de interpretor. Se realizzeaza in cadrul blocului de introducere a datelor: citirea
liniilor din programul sursa, interpretarea lor, memorarea datelor in memoria tampon , dupa
verificarea corectitudinii lor, si apoi in memoriile operative (registri ex. N, G, X,……S,T,M),
Memoria tampon asigura continuitatea deplasarii sculei.
PROGRAMAREA SISTEMELOR NUMERICE CNC
Fig.2.22
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
18. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
FUNCTII NCK
2.Functia de interpolator.Se citesc datele din buffer si se calculeaza poztia si vitezele pe fiecare
axa, rezultatul se memoreaza intr-un buffer de tyipul FIFO prin care se controleaza
acceleratiile/deceleratiile. Interpolatorul genereaza un tren de impulsuri corespunzator cu
datele traiectoriei. Numarul de impulsuri determina lungimea traiectoriei iar frecventa
viteza de deplasare
Ex. cursa de 50 mm, 1BLU=0.002 mm
v=1m/min.Rezulta; 25000 impulsuri si frecventa 8333 imp./s
3.Functia de control accelerare-decelerare. Este executata prin utilizarea datelor de
interpolare.Deoarece la porniri si opriri apar vibratii si socuri. Filtrarile pentru controlul
acc/decc. se executa inainte de interpolare datelor si transferul catre control-pozitie.
Pentru controlul acceleratiilor/deceleratiilor se realizeaza o filtrare in faza de pornire/oprire.
Metoda se numesteaccelerare/decelerare dupa interpolare. Datele de la controlul
acceler/deceler. Sunt transmise controlerului de pozitie , de regula de tip PID.
4.Functia de control-pozitie.Datele de la control acc.decc.sunt transferate unitatii de control
pozitie.Transferul datelor se face la intervale constante de timp.De regula pentru controlul
pozitiei se utilizeaza controlere de tipul PID.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
19. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.3.5 FUNCTII PLC
Controlerele logice sunt utiluzate pentru a executa controlul secvential al masinii-unelte.
Primele controlere au fost construite cu relee numaratoare diferite ciruite si programatoare de
timp.
Acum CL contin un numar restrans de dispozitive electrice incluzand …P si memorii capabile sa
realizeze functii logice, de numarare, operatii aritmetice, programatoare de timp etc.
La punerea sub tensiune a PLC-ului, memoria sistemului controleaza I/O, releele
,numaratoarele, memoreaza programul utilizator si datele ce urmeaza a fi interpretate de ……P.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
21. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
SISTEMUL DE CONTROL
Functiile NCK,PLCsi MMI trebuie executate la anumite intervale constante de timp in
conformitate cu anumite prioritati .
Sistemul CNC este de tipul unui system complex REAL-TIME
Pentru a acoperi resursele procesorului este necesar un management adecvt de programare a
executiei lor.
Prioritatea maxima o are controlul pozitiei, urmata de interpolare, interpretor. Functia MMI
are cea mai mica prioritate. Controlul pozitiei se activeaza la fiecare 1 msec., interpolatorul la 2
msec. iar interpretorul la fiecare 4 msec. Primele trei functii au un ciclu constant. MMI cu
prioritatea minima, utilizeaza resursele in plus a procesorului dupa terminarea ciclului de
executie a primelor trei functii.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
23. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Controlul deplasărilor: prin intermediul erorii
Fig. 2.25.
ε = aMbMVM + aJ1bJ1VJ1 + a0b0V0 + apbpVp + aRbRVR + aCSbCSVCS + aibiVi + aJ2bJ2VJ2 (2.1)
În care: a = 1 sau 0 ; b = -1 sau 1
VM – valoarea poziţiei curente a sculei în raport cu originea maşinii stabilită prin
microcontacte
am = bm = 1
VJ1 – valoarea jocului de întoarcere; aJ1 = bJ1 = 1
(se consideră numai deplasarea în sensul negativ al axei) ;
V0 – deplasarea de origine a piesei în raport cu originea maşinii; a0 = 1 ; b0 = -1
V – deplasarea suplimentară de origine prin G92. a = 1 ; b = -1
CAPI
CAPIII
CAPV
CAPVI
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
24. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
VR – valoarea cotei de referinţă, cotare incrementală, poziţia momentană a sculei faţă de
OM la începutul deplasării, se consideră şi convecţia de joc VM
VR = VM + aJ1VJ1
Când se ia în calcul VR, a0 = ap = 0 (fiind progr. G91) şi invers aR = 0 când se consideră V0
şi Vp;
Valoarea bR = -1 întotdeauna;
VCS – valoarea corecţiei de sculă, aCS = -1 când este programată G43 (bCS = 1) sau G44
(bCS= -1);
VI – valoarea cotei programate aI = 1 bI = -1;
VJ2 – valoarea deplasării suplimentare pentru pozitionări unidirecţionale, bJ2 = +1;
CAPI
CAPIII
CAPV
CAPVI
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
25. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Cand ε → 0 se initiază un ciclu de oprire;
VR – avans rapid; F – avans programat;
A0 – anticipare oprire; ZP – zona de reducere parabolică a vitezei de avans;
Din relatia (2.1) se poate deduce relaţia:
VD = VP ± VC ± VCM ± .............. în care:
VD – valoarea deplasării organului mobil;
VP – valoarea programată;
VC – valoarea corecţiei;
VCM – valoarea constantelor de maşină;
CAPI
CAPIII
CAPV
CAPVI
Fig. 2.26.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
26. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.5.1 Clasificarea ECN
posibilităţi de prelucrare: PCP, PL, C;
programarea cotelor: absolut (G90), incremental (G91);
circuite de comandă: bucla închisă, deschisă;
realizare: hardware, software.
Posibilităţi de prelucrare:
CAPI
CAPIII
CAPV
CAPVI
Fig. 2.28
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
27. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.5.2 Sisteme de control
Sisteme pas cu pas (MPP)
Se mai numesc sisteme in bucla deschisa:
Motorul pas cu pas preia impulsuri(caracterizate prin amplitudine si
frecventa) si le converteste in miscare de rotatie;
Probleme:MPP dezvolta un moment, de regula, scazut in raport de alte
motoare,la depasirea lui apare “alunecarea”.
Motorul nu “stie” unde se gaseste , stie doar unde trebuie sa ajunga.
CAPI
CAPIII
CAPV
CAPVI
Fig. 2.29.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
29. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
2.6 Caracteristici principale ale masinilor CNC:
masive, de regula de 4 ori mai grele decat o masina unealta conventionala;
motoare de actionare puternice cu posibilitati de aschiere rapida (in
concordanta cu sculele moderne).Puterea si turatia sunt de 4 ori mai mari(decat
cu m-u conventionale);
schimbator automat de scule cu capacitatea de la 8 la sute de scule si sistem
de paletizare.
Magazin de scule.(exemplu)
CAPI
CAPIII
CAPV
CAPVI
Fig. 2.31.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
31. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Sistemul de paletizare:
Precizie ridicata, de regula 0,01- 0,001 mm.
CAPI
CAPIII
CAPV
CAPVI
Fig. 2.32.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
33. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Cum se realizeaza precizia (1):
suruburi cu bile:
CAPI
CAPIII
CAPV
CAPVI
Fig. 2.33.
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
37. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Cum se realizeaza precizia (2):
ghidaje de tip tanchete ( elimina sleep-slip-ul)
Recirculabile FixeCAPI
CAPIII
CAPV
CAPVI
Fig. 2.38.
IAMU-BLAJ
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
38. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Cum se realizeaza precizia (3):
traductare de deplasare.
CAPI
CAPIII
CAPV
CAPVI
Fig. 2.39.
Encoder
Heidenhain
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX
39. CAPI
CAPII
CAPIII
CAPV
CAP IV
CAPVI
CAPVII
Animation CIM
Bibliografie recomandata:
-Programarea sistemelor numerice CNC : pg.:4-23
-Bazele programrii numerice: pg.:6-22
-Masini si instalatii in sisteme robotizate: pg.:160-165 ; pg.:185-192
CAPI
CAPIII
CAPV
CAPVI
Video
CIM
PROGRAMAREA SISTEMELOR NUMERICE CNC
CAP I
CAP II
CAP III
CAP IV
CAP V
CAP VI
CAP VII
CAP VIII
CAP IX