
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Cac lnh matlab_chuyn_di
Similar to Cac lnh matlab_chuyn_di (20)
Cac lnh matlab_chuyn_di
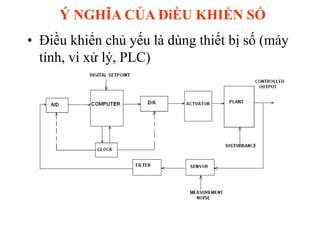
- 1. Ý NGHĨA CỦA ĐiỀU KHIỂN SỐ • Điều khiển chủ yếu là dùng thiết bị số (máy tính, vi xử lý, PLC)
- 2. Ý NGHĨA CỦA ĐIỀU KHIỂN SỐ • Các hệ thống điều khiển phân bố, nối mạng
- 3. MÔ HÌNH HỆ KHÔNG LIÊN TUC (Hệ thời gian rời rạc-discrete time system) Tín hiệu rời rạc Khi hệ thống điều khiển có sự tham gia của máy tính thì tín hiệu được máy tính xử lý là tín hiệu số, kết quả của chuyển đổi tín hiệu liên tục u(t) thành tín hiệu rời rạc u*(t) bởi chuyển đổi ADC thông qua khóa lấy mẫu chu kỳ Ts và lượng tử hóa. Tín hiệu rời rạc này chuyển đổi bởi mạch cài và DAC, gọi chung là mạch giữ bậc 0 (zero order hold), trở thành tín hiệu liên tục uh(t)
- 4. CHU KỲ LẤY MẪU • Chọn chu kỳ lấy mẫu Ts</m , m là khổ sóng tối đa của tín hiệu được lấy mẫu • Thực tế chọn Ts nhỏ hơn giá trị /m chừng 10 lần do tín hiệu thực sự thường có khổ sóng không giới hạn • Tín hiệu cần thiết thường có xen lẫn nhiễu tần số cao do đó cần phải có bộ lọc làm suy giảm thành phần tần số cao này, nếu không sẽ gây ra aliasing (frequency folding)
- 5. BIẾN ÑỔIZ u*(t) = u(tk) ở các thời điểm tk=kTs, ngoài ra u*(t) =0 )kTδ(tu(kTs))kTδ(tu(t)(t)u s 0k0k s * là hàm xung Dirac Lấy biến đñổi Laplace hai vế 0 0 00 0 * )( )()()()()( k skT s k st ss k st ss s ekTu ekTtkTuekTtkTusU Đặt zeukTu ssT ks ,)( )()(,)(, * zUsUukTuez ks sTs 0 )( k k k zuzU
- 6. BIẾN ĐỔỈ Z Biến ñổi Zcủa xk-m (trễ m chukỳ) là z-m X(z) Biến ñổi Zcủa xk+m là m i i i m zxzXz 0 )( Biến ñổi Zcủa akxk là X(z/a) Giới hạn ñầu: x(0)= limX(z)z -> Giới hạn cuối: x()= lim(z-1)X(z),z 1 Biến ñổi của là X(z).z/(z-1) k i ix 0 Biến ñổi kxk là -z dX(z)/dz
- 7. Biến đổi z Ví dụ: biến đổi z của tín hiệu nấc lấy mẫu n k k zzzzzX ..1)( 21 0 Nhân z với hai vế rồi trừ với biểu thức cũ 1 )( )()1( z z zX zzXz Ví dụ: biến đổi Z của akxk là )()( 00 a z X a z xzxa k k k k k k k Ví dụ: biến đổi Z của e-kT là biến đổi của 1.(e-T)k T T T ez z e z e z zX 1 )( Ví dụ: dùng Matlab >> syms t z ; ztrans (t) ans = z/(z-1)^2
- 8. BẢNG BIẾN ĐỔI Z Laplace Z Hàm thời gian 1 1 Xung Dirac Hàm nấc t e-at te-at s 1 1z z 2 1 s 2 )1( z Tz as 1 aT ez z 2 )( 1 as 2 )( aT aT ez zTe
- 9. BẢNG BIẾN ĐỔI Z Laplace Z Hàm thời gian 22 )( bas b aTaT aT ezbTez zbTe 22 )cos2( )sin( bte at sin 22 )( bas as aTaT aT ezbTez zbTez 22 2 )cos2( )cos( bte at cos )( ass a ))(1( )1( aT aT ezz ze at e 1 ))(( asbs ab btat ee bTaT ez z ez z
- 10. Hàm truyền z hệ rời rạc Hệ rời rạc biểu thị bằng phương trình sai phân c(k+n)+an-1c(k+n-1)+…+a1c(k+1)+a0c(k)= bmr(k+m)+bm-1r(k+m-1)+..+b1r(k+1)+b0r(k) Lấy biến đổi Z hai vế, giả sử sơ kiệnbằng 0 znC(z)+ an-1zn-1C(z) +..+a1zC(z)= bmzmR(z) + bm-1zm-1R(z) +..+b1zR(z) + b0R(z) Hàm truyền Z: 01 1 1 1 1 01 1 1 .. .. )( )( )( azazazaz bzbzbzb zR zC zG n n n n n m m m m
- 11. Phương trình trạng thái hệ rời rạc Phương trình trạng thái hệ rời rạc Từ hàm truyền hệ rời rạc ta có thể viết phương trình trạng thái dưới dạng sau x(k+1) = Fx(k)+ Gr(k) y(k) = Cx(k) + Dr(k) Các ma trận được tạo ra giống như hệ liên tục Ví dụ: 254 713124 )2()1( 713124 )( 23 23 2 23 zzz zzz zz zzz zG
- 12. MÔ HÌNH HỆ KHÔNG LIÊN TUC (Hệ thời gian rời rạc-discrete time system) Phương trình trạng thái hệ rời rạc, ví dụ Dạng first companion )(4 )( )( )( 471)( )( 1 0 0 )( )( )( 452 100 010 )1( )1( )1( 3 2 1 3 2 1 3 2 1 ku kx kx kx ky ku kx kx kx kx kx kx Dạng Jordan 2 3 1 1 )1( 2 4)( 2 zzz zG )(4 )( )( )( 312)( )( 1 1 0 )( )( )( 200 010 011 )1( )1( )1( 3 2 1 3 2 1 3 2 1 ku kx kx kx ky ku kx kx kx kx kx kx
- 13. Ví dụ MATLAB >> htz= tf([4 -1213-7],conv([1 -2],conv ([1 -1],[1-1]))) Transferfunction: 4 z^3- 12z^2+ 13 z-7 ------------------------- z^3- 4 z^2+ 5z- 2 Samplingtime:unspecified >> ptttz=canon(htz,'companion') a= x1 x2 x3 x1 0 0 2 x2 1 0 -5 x3 0 1 4 b = u1 x1 1 x2 0 x3 0 c = x1 x2 x3 y1 4 9 17 d = u1 y1 4 Samplingtime: unspecified Discrete-time model.
- 14. Hàm truyền Z từ phương trình trạng thái Tương tự như với hệ liên tục, hàm truyền Z tính theo công thức X(z)= (zI-F)-1 zx0 + (zI-F)-1 gU(z) Y(z) =c (zI-F)-1 zx0+ [c(zI-F)-1g+d]U(z) Nếu x0 = 0 dgFzIc zU zY zG 1 )( )( )( )( Tính x(k) và y(k) Từ phương trình trạng thái x(k+1) = Fx(k) + gu(k) Ta suy ra x(1) = Fx(0)+ gu(0) ; x(2)=Fx(1)+gu(1)… 1 0 1 )()0()( k i ikk iguFxFkx
- 15. Đáp ứng hệ thống Đặt (k) = Fk ,(0)= I , (k)gọi là ma trận chuyển trạng thái 1 0 )()1()0()()( k i iguikxkkx Tính (k) Dùng Z đảo (k)=Z-1[(zI-F)-1z] Ví dụ: 116.0 10 F 1 1 116.0 1 )( z z FzI
- 16. Tính đáp ứng dùng Z đảo 8.0 3/4 2.0 3/1 8.0 3/8.0 2.0 3/8.0 8.0 3/5 2.0 3/5 8.0 3/1 2.0 3/4 )8.0)(2.0()8.0)(2.0( 16.0 )8.0)(2.0( 1 )8.0)(2.0( 1 zzzz zzzz zz z zz zzzz z kkkk kkkk k )8.0( 3 4 )2.0( 3 1 )8.0( 3 8.0 )2.0( 3 8.0 )8.0( 3 5 )2.0( 3 5 )8.0( 3 1 )2.0( 3 4 )(
- 17. Tính đáp ứng dùng Z đảo Cho g = [1 1]T ,c=[1 0], x0= [1 –1]T , u(t)=1(t), ta tính được 18 25 )8.0( 9 22 )2.0( 6 17 )( kk ky Dùng công thức 1; 1 1 1 0 a a a a kk j j Dùng MATLAB >>t=0:0.1:10; >>u=ones(size(t)); >>F=[0 1;-0.16 -1]; >>g=[1;1]; >>c=[1 0]; >>d=0;rr=ss(F,g,c,d,0.1); >>[y,x]=lsim(rr,u,t,x0); >>stairs(t,y)
- 18. Tính Fk dùng định lý Cayley Hamilton FIF F k 10 21 1 21 10 Các hệ số tính từ phương trình 1 1 10 k k k Suy ra kk kk F k k kk k k 1 )1( )1( )1( )1)(1( 1 0
- 19. Hàm truyền hệ liên tục lấy mẫu Khâu ZOH có hàm truyền s e sT 1 T là thời gian lấy mẫu Biến đổi Z của hệ thời gian rời rạc là ) )( ( 1 ))( 1 ()( s sG Z z z sG s e ZzG sT ký hiệu GhoG(z)
- 20. Tính đáp ứng dùng hàm truyền z )()(1 )()( )( )( 0 0 zGHGzD zGGzD zR zY h h Với các thông số: D(z) = 1, H(s) = 1, G(s) =1/s(s+1); T = 1, r(t) là hàm nấc ))(1( )1()1( 1)1( 1 ( 1 1111 ( )1( 11 ( 1 ()( 22 20 T TTT T h ezz TeeeTz ez z z z z Tz z z sssz z ssz z s G(s) z z zGG ))Z )Z)Z
- 21. Tính đáp ứng dùng hàm truyền z Với T=1 3679.03679.1 2642.03679.0 )( 20 zz z zGGh 6321.0 2642.03679.0 )( )( 2 zz z zR zY 76 54321 23 2 2 8015.08944.0 1469.13996.13996.13679.0 6321.06321.12 2642.03679.0 6321.0 2642.03679.0 1 )( zz zzzzz zzz zz zz z z z zY Dùng Matlab >>lt = tf([1],[1 1 0]); >>ltd =c2d(lt,1,'zoh') Transfer function: 0.3679 z + 0.2642 ---------------------- z^2 - 1.368 z + 0.3679 >>htdk =feedback(ltd,1) Transfer function: 0.3679 z +0.2642 ----------------- z^2 - z+0.6321 >>[y,t]=step(ltdk); >>stairs(t,y)
- 22. Tính đáp ứng dùng hàm truyền z 0 5 10 15 20 25 0 0.2 0.4 0.6 0.8 1 1.2 1.4
- 23. PTTT hệ liên tục thời gian rời rạc Hệ liên tục có tín hiệu vàolà u+(t) từ khâu ZOH, pttt hệ liên tục : )()()( )()()( tdutcxty tbutAxtx Giải pttt t t tAttA dbuetxetx 0 0 )()()( )( 0 )( u+(t)=u(kT), kT<= t< =(k+1)T Trongkhoảng thời gian kT< = t < = (k+1)T t kT tAkTtA kTubdekTxetx )(][)()( )()( )()( )(][)())1(( )1( ))1[( kTgukTFx kTubdekTxetkx Tk kT TkAAT Đặt=-kT,= T- bdeg T A 0
- 24. PTTT hệ liên tục thời gian rời rạc Ví dụ:chohệrời rạcvới sT ss sG zz kzkzk zD 1.0, )5( 1 )( )1( )( 32 2 1 Phương trình trạng thái hệ liên tục 01, 1 0 , 50 10 cbA Dùng định lý Cayley Hamilton tính eAt t t At e e e 5 5 0 1( 5 1 1 6065.00 0787.01 0 1( 5 1 1 5 5 T T AT e e eF 0787.0 0043.0 )1( 5 1 5 1 5 1 ( 5 1 )1( 5 1 5 5 0 5 0 5 0 T T T T T A e eT de de dbeg
- 25. PTTT hệ liên tục thời gian rời rạc PTTT khối D(z) dạng đồng hành thứ hai )( )( )( 10)( )( )( )( 11 00 )1( )1( 1 4 3 12 3 4 3 4 3 kek kx kx ku ke kk k kx kx kx kx e(k) là tín hiệu sai lệch:e(k) = r(k) -y(k) =r(k)-x1(k) Phương trình trạng thái hệ kín )( )( )( )( 0001)( )( 0787.0 0043.0 )( )( )( )( 110)( 000 0787.006065.00787.0 0043.000787.00043.01 )1( )1( )1( )1( 4 3 2 1 21 3 1 1 4 3 2 1 21 3 1 1 4 3 2 1 kx kx kx kx ky kr kk k k k kx kx kx kx kk k k k kx kx kx kx
- 26. Dùng Matlab >> T=0.1; K1=1; K2=1; K3=1; >> A=[0 1;0 -5]; b =[0;1]; c=[1 0]; d=0; >> AR =[0 0;1 1]; BR=[K3;K1+K2]; CR=[0 1]; DR=K1; >> pttt1=ss (A,b,c,d); >> pttt1r = c2d(pttt1,T,'zoh'); >> pttt2r = ss(AR,BR,CR,DR,T); >> PTTTK = feedback(pttt1r*pttt2r,1) a = x1 x2 x3 x4 x1 0.9957 0.07869 0 0.004261 x2 -0.07869 0.6065 0 0.07869 x3 -1 0 0 0 x4 -2 0 1 1 b = u1 x1 0.004261 x2 0.07869 x3 1 x4 2 c = x1 x2 x3 x4 y1 1 0 0 0 d = u1 y1 0 Sampling time: 0.1 Discrete-time model.
- 27. HÀM TRUYỀN Z HỆ CÓ TRỄ Hàm truyền rời rạc: st1st ho dd e)s(G s 1 Z)z1(e)s(G)s(G )z(U )z(Y Đặt td=NTs+Ts , 0 1 sTN1 s e)s(G s 1 Zz)z1( )z(U )z(Y
- 28. HÀM TRUYỀN Z HỆ CÓ TRỄ- VÍ DỤ as e s e Zz)z1( a 1 )as(s e Zz)z1( )z(U )z(Y as 1 )s(G TsTs N1 Ts N1 )Tt(ue)t(g as e L )Tt(u)t(g s e L )Tt(a 2 Ts 1 1 Ts 1 )Tt(ue)t(g as e L )Tt(u)t(g s e L )Tt(a 2 Ts 1 1 Ts 1 u(t) là hàm nấc đơn vị Tìm biến đổi z các hàm rời rạc g1(kT) và g2(kT)
- 29. HÀM TRUYỀN Z HỆ CÓ TRỄ- VÍ DỤ ...zezeze))kT(g(Z 1z 1 z1 1 z...)zzz1(z ...zzzz)kT(g))kT(g(Z 3)TT3(a2)TT2(a1)TT(a 2 1 13211 0k 321k 11 Đặt thông số mới m=1- aT amT 1aT 1amT 2aT21aT1amT 3aT2amT2aTamT1amT 2 ez e ze1 1 ze ...zeze1ze ...zeezeeze))kT(g(Z Sau cùng: )ez(z eez)e1( a 1 )z(U )z(Y aT1N aTamTamT
- 30. BẢNG BIẾN ĐỔI CÓ TRỄ )ez(a e )1z(a 1amT )1z( T )as(s ae )ez)(1z( )ee(z)e1( )as(s ae ez e ez e [ ab 1 )bs)(as( e ez e as e )1z( )1m(z)1m2m2(zm T s e2 )1z( T 1z mT s e 1z 1 s e aT amT 22 Ts aT aTamTamTTs bT bmT aT amTTs aT amTTs 3 2222 2 3 Ts 22 Ts Ts
- 31. PTTT Hệ rời rạc có trễ Xét hệ SISO có thời gian trễ td 1,10, )()()( mTNTt ttbutAxtx d d Nếu N = 0, ta thêm biến trạng thái xn+1 T mT AAAmTAT nn bdegbdeegeF ku g kx kxgF kx kx 0 0 21 2 1 1 1 ,, )( 1)( )( 00)1( )1( Nếu N>0,ta thêm N+1 biến trạng thái )( 1 0 : 0 0 )( )( : )( )( )( 0..0000 1 .. .. .. 0 .. 0 .. 0 .. 0 .. ............ 0..0100 0..0 )1( )1( : )1( )1( )1( 1 2 1 21 1 2 1 ku kx kx kx kx kxggF kx kx kx kx kx Nn Nn n n Nn Nn n n
- 32. PTTT Hệ rời rạc có trễ VÍ DỤ Hệ rời rạc 2387.0eedeeg 3935.0e1deg 3679.0eF 5.0m,5.0,1N sec1T,)5.1t(u)t(x)t(x 15.0 5.0 0 5.0 1 5.0 5.0 0 2 1 11 Phương trình rời rạc x1(k+1)=0.3679x1(k)+0.2387u(k-2)+0.3935u(k-1) Đặt biến x2(k)=u(k-2), x3(k)=u(k-1) )k(x]001[)k(y )k(u 1 0 0 )k(x )k(x )k(x 000 100 3935.02387.03679.0 )1k(x )1k(x )1k(x 3 2 1 3 2 1