Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp với đề tài: Thiết kế hệ thống đo nhiệt độ, cho các bạn làm luận văn tham khảo
Bộ phận cảm biến: bộ cảm biến phát và bộ cảm biến thu. Thông thường người ta sử dụng phần phát là LED hồng ngoại để phát ra ánh sáng hồng ngoại mục đích để chống nhiễu so với các loại ánh sáng khác, còn phần thu là transistor quang để thu ánh sáng hồng ngoại.
báo cáo thực tập tốt nghiệp nhà thuốc số 6 svth nguyễn huệ tâm - Scribd
ĐỒ ÁN: Thiết kế mạch đếm sản phẩm dùng cảm biến hồng ngoại!
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện với đề tài: Thiết kế hệ thống điều khiển bơm nước sử dụng plc s7-1200, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp với đề tài: Thiết kế hệ thống đo nhiệt độ, cho các bạn làm luận văn tham khảo
Bộ phận cảm biến: bộ cảm biến phát và bộ cảm biến thu. Thông thường người ta sử dụng phần phát là LED hồng ngoại để phát ra ánh sáng hồng ngoại mục đích để chống nhiễu so với các loại ánh sáng khác, còn phần thu là transistor quang để thu ánh sáng hồng ngoại.
báo cáo thực tập tốt nghiệp nhà thuốc số 6 svth nguyễn huệ tâm - Scribd
ĐỒ ÁN: Thiết kế mạch đếm sản phẩm dùng cảm biến hồng ngoại!
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện với đề tài: Thiết kế hệ thống điều khiển bơm nước sử dụng plc s7-1200, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện tử với đề tài: Thiết kế hệ thống đo độ ẩm, cho các bạn làm luận văn tham khảo
Đồ án Điều khiển và giám sát dây chuyền chiết rót sử dụng PLC s7 - 1200Daren Harvey
TÓM TẮT
Đề tài tốt nghiệp đề cập đến việc thiết kế giao diện để điều khiển, giám sát
và thu thập dữ liệu từ dây chuyền chiết rót. Giao diện được thiết kế trên phần mềm
Wincc của hãng Siemens với thiết kế đẹp mắt và đầy đủ các tính năng cần thiết cho
người vận hành cũng như người giám sát hệ thống. Khóa luận cũng hướng dẫn cụ thể
các bước để các bạn khóa sau có thể tham khảo lập trình trên Wincc một cách dễ dàng.
Với các chức năng cần thiết, phân quyền người dùng trong Wincc, thiết kế giao diện từ
thư viện, tạo nút nhấn…
Dây chuyền được điều khiển thông qua PLC S7-1200 của Siemens đây cũng
là loại PLC cao cấp của Siemens sử dụng rộng rãi trong các khu công nghiệp tự động
vừa và lớn với yêu cầu ổn định và chất lượng cao. Dây chuyền điều khiển thiết kế đơn
giản với 2 băng tải có chức năng vận chuyển chai, các hệ thống vòi chiết rót, hệ thống
cấp nắp, vặn nắp, dán nhãn và mâm xoay đưa các chai vào đúng vị trí. Các cảm biến
khác bao gồm cảm biến quang để xác định vị trí chai, cảm biến tiệm cận để xác định
góc quay, cảm biến mực nước chất lỏng xác định mực nước được rót vào trong chai và
hệ thống khí nén cũng được sử dụng.
https://lop7.net/
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện công nghiệp với đề tài: Xây dựng bộ biến đổi DC/AC có điện áp ra 220V ,tần số 50Hz, dạng hình sin, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện công nghiệp với đề tài: Nghiên cứu tổng quan về PLC của hãng Siemens và ứng dụng thiết kế điều khiển tự động hệ thống nhiều bơm lên bể chứa
Nhận viết luận văn đại học, thạc sĩ trọn gói, chất lượng, LH ZALO=>0909232620
Tham khảo dịch vụ, bảng giá tại: https://vietbaitotnghiep.com/dich-vu-viet-thue-luan-van
Download luận văn đồ án tốt nghiệp ngành điện với đề tài: Nghiên cứu thiết kế mạch đo nhiệt độ dùng LM35 va gửi tín hiệu nhiệt độ lên internet, cho các bạn tham khảo
Nhận viết luận văn đại học, thạc sĩ trọn gói, chất lượng, LH ZALO=>0909232620
Tham khảo dịch vụ, bảng giá tại: https://vietbaitotnghiep.com/dich-vu-viet-thue-luan-van
Download luận văn đồ án tốt nghiệp ngành điện tử truyền thông với đề tài: Hệ thống Iot điều khiển và giám sát ngôi nhà, cho các bạn có thể tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp với đề tài:Tổng hợp mạch vòng tốc độ theo hai tiêu chuẩn module tối ưu, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành kĩ thuật điện với đề tài: Mô hình phân loại sản phẩm theo chiều cao dùng Arduino, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện tử truyền thông với đề tài: Ứng dụng PLC S7 – 1200 để điều khiển và giám sát lò đốt bã mía, cho các bạn làm luận văn tham khảo
Nhận viết luận văn đại học, thạc sĩ trọn gói, chất lượng, LH ZALO=>0909232620
Tham khảo dịch vụ, bảng giá tại: https://vietbaitotnghiep.com/dich-vu-viet-thue-luan-van
Download luận văn đồ án tốt nghiệp ngành điện tử công nghiệp với đề tài: Thiết kế và thi công hệ thống giám sát và điều khiển thiết bị trong nhà kết hợp wifi và lora, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện tử với đề tài: Thiết kế hệ thống đo độ ẩm, cho các bạn làm luận văn tham khảo
Đồ án Điều khiển và giám sát dây chuyền chiết rót sử dụng PLC s7 - 1200Daren Harvey
TÓM TẮT
Đề tài tốt nghiệp đề cập đến việc thiết kế giao diện để điều khiển, giám sát
và thu thập dữ liệu từ dây chuyền chiết rót. Giao diện được thiết kế trên phần mềm
Wincc của hãng Siemens với thiết kế đẹp mắt và đầy đủ các tính năng cần thiết cho
người vận hành cũng như người giám sát hệ thống. Khóa luận cũng hướng dẫn cụ thể
các bước để các bạn khóa sau có thể tham khảo lập trình trên Wincc một cách dễ dàng.
Với các chức năng cần thiết, phân quyền người dùng trong Wincc, thiết kế giao diện từ
thư viện, tạo nút nhấn…
Dây chuyền được điều khiển thông qua PLC S7-1200 của Siemens đây cũng
là loại PLC cao cấp của Siemens sử dụng rộng rãi trong các khu công nghiệp tự động
vừa và lớn với yêu cầu ổn định và chất lượng cao. Dây chuyền điều khiển thiết kế đơn
giản với 2 băng tải có chức năng vận chuyển chai, các hệ thống vòi chiết rót, hệ thống
cấp nắp, vặn nắp, dán nhãn và mâm xoay đưa các chai vào đúng vị trí. Các cảm biến
khác bao gồm cảm biến quang để xác định vị trí chai, cảm biến tiệm cận để xác định
góc quay, cảm biến mực nước chất lỏng xác định mực nước được rót vào trong chai và
hệ thống khí nén cũng được sử dụng.
https://lop7.net/
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện công nghiệp với đề tài: Xây dựng bộ biến đổi DC/AC có điện áp ra 220V ,tần số 50Hz, dạng hình sin, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện công nghiệp với đề tài: Nghiên cứu tổng quan về PLC của hãng Siemens và ứng dụng thiết kế điều khiển tự động hệ thống nhiều bơm lên bể chứa
Nhận viết luận văn đại học, thạc sĩ trọn gói, chất lượng, LH ZALO=>0909232620
Tham khảo dịch vụ, bảng giá tại: https://vietbaitotnghiep.com/dich-vu-viet-thue-luan-van
Download luận văn đồ án tốt nghiệp ngành điện với đề tài: Nghiên cứu thiết kế mạch đo nhiệt độ dùng LM35 va gửi tín hiệu nhiệt độ lên internet, cho các bạn tham khảo
Nhận viết luận văn đại học, thạc sĩ trọn gói, chất lượng, LH ZALO=>0909232620
Tham khảo dịch vụ, bảng giá tại: https://vietbaitotnghiep.com/dich-vu-viet-thue-luan-van
Download luận văn đồ án tốt nghiệp ngành điện tử truyền thông với đề tài: Hệ thống Iot điều khiển và giám sát ngôi nhà, cho các bạn có thể tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp với đề tài:Tổng hợp mạch vòng tốc độ theo hai tiêu chuẩn module tối ưu, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành kĩ thuật điện với đề tài: Mô hình phân loại sản phẩm theo chiều cao dùng Arduino, cho các bạn làm luận văn tham khảo
Nhận viết luận văn Đại học , thạc sĩ - Zalo: 0917.193.864
Tham khảo bảng giá dịch vụ viết bài tại: vietbaocaothuctap.net
Download luận văn đồ án tốt nghiệp ngành điện tử truyền thông với đề tài: Ứng dụng PLC S7 – 1200 để điều khiển và giám sát lò đốt bã mía, cho các bạn làm luận văn tham khảo
Nhận viết luận văn đại học, thạc sĩ trọn gói, chất lượng, LH ZALO=>0909232620
Tham khảo dịch vụ, bảng giá tại: https://vietbaitotnghiep.com/dich-vu-viet-thue-luan-van
Download luận văn đồ án tốt nghiệp ngành điện tử công nghiệp với đề tài: Thiết kế và thi công hệ thống giám sát và điều khiển thiết bị trong nhà kết hợp wifi và lora, cho các bạn làm luận văn tham khảo
Nhận viết luận văn đại học, thạc sĩ trọn gói, chất lượng, LH ZALO=>0909232620
Tham khảo dịch vụ, bảng giá tại: https://baocaothuctap.net
Download luận văn đồ án tốt nghiệp với đề tài: Xây dựng các bộ điều khiển truyền thống dùng cho các hệ thống truyền động điện, cho các bạn làm luận văn tham khảo
Những ứng dụng của PLC dành cho những ai muốn theo đổi ngành tự động hóa.
Mọi thông tin chi tiết và cấu trúc của các dòng máy bế hộp, máy cán màng nhiệt, máy xén giấy,...
các bạn truy cập vào website: http://sieuthimaynganhin.com/
CÁC BIỆN PHÁP KỸ THUẬT AN TOÀN KHI XÃY RA HỎA HOẠN TRONG.pptxCNGTRC3
Cháy, nổ trong công nghiệp không chỉ gây ra thiệt hại về kinh tế, con người mà còn gây ra bất ổn, mất an ninh quốc gia và trật tự xã hội. Vì vậy phòng chông cháy nổ không chỉ là nhiệm vụ mà còn là trách nhiệm của cơ sở sản xuất, của mổi công dân và của toàn thể xã hội. Để hạn chế các vụ tai nạn do cháy, nổ xảy ra thì chúng ta cần phải đi tìm hiểu nguyên nhân gây ra các vụ cháy nố là như thế nào cũng như phải hiểu rõ các kiến thức cơ bản về nó từ đó chúng ta mới đi tìm ra được các biện pháp hữu hiệu nhất để phòng chống và sử lý sự cố cháy nổ.
Mục tiêu:
- Nêu rõ các nguy cơ xảy ra cháy, nổ trong công nghiệp và đời sống; nguyên nhân và các biện pháp đề phòng phòng;
- Sử dụng được vật liệu và phương tiện vào việc phòng cháy, chữa cháy;
- Thực hiện được việc cấp cứa khẩn cấp khi tai nạn xảy ra;
- Rèn luyện tính kỷ luật, kiên trì, cẩn thận, nghiêm túc, chủ động và tích cực sáng tạo trong học tập.
GIÁO TRÌNH 2-TÀI LIỆU SỬA CHỮA BOARD MONO TỦ LẠNH MÁY GIẶT ĐIỀU HÒA.pdf
https://dienlanhbachkhoa.net.vn
Hotline/Zalo: 0338580000
Địa chỉ: Số 108 Trần Phú, Hà Đông, Hà Nội
GIAO TRINH TRIET HOC MAC - LENIN (Quoc gia).pdfLngHu10
Chương 1
KHÁI LUẬN VỀ TRIẾT HỌC VÀ TRIẾT HỌC MÁC - LÊNIN
A. MỤC TIÊU
1. Về kiến thức: Trang bị cho sinh viên những tri thức cơ bản về triết học nói chung,
những điều kiện ra đời của triết học Mác - Lênin. Đồng thời, giúp sinh viên nhận thức được
thực chất cuộc cách mạng trong triết học do
C. Mác và Ph. Ăngghen thực hiện và các giai đoạn hình thành, phát triển triết học Mác - Lênin;
vai trò của triết học Mác - Lênin trong đời sống xã hội và trong thời đại ngày nay.
2. Về kỹ năng: Giúp sinh viên biết vận dụng tri thức đã học làm cơ sở cho việc nhận
thức những nguyên lý cơ bản của triết học Mác - Lênin; biết đấu tranh chống lại những luận
điểm sai trái phủ nhận sự hình thành, phát triển triết học Mác - Lênin.
3. Về tư tưởng: Giúp sinh viên củng cố niềm tin vào bản chất khoa học và cách mạng
của chủ nghĩa Mác - Lênin nói chung và triết học Mác - Lênin nói riêng.
B. NỘI DUNG
I- TRIẾT HỌC VÀ VẤN ĐỀ CƠ BẢN CỦA TRIẾT HỌC
1. Khái lược về triết học
a) Nguồn gốc của triết học
Là một loại hình nhận thức đặc thù của con người, triết học ra đời ở cả phương Đông và
phương Tây gần như cùng một thời gian (khoảng từ thế kỷ VIII đến thế kỷ VI trước Công
nguyên) tại các trung tâm văn minh lớn của nhân loại thời cổ đại. Ý thức triết học xuất hiện
không ngẫu nhiên, mà có nguồn gốc thực tế từ tồn tại xã hội với một trình độ nhất định của
sự phát triển văn minh, văn hóa và khoa học. Con người, với kỳ vọng được đáp ứng nhu
cầu về nhận thức và hoạt động thực tiễn của mình đã sáng tạo ra những luận thuyết chung
nhất, có tính hệ thống, phản ánh thế giới xung quanh và thế giới của chính con người. Triết
học là dạng tri thức lý luận xuất hiện sớm nhất trong lịch sử các loại hình lý luận của nhân
loại.
Với tư cách là một hình thái ý thức xã hội, triết học có nguồn gốc nhận thức và nguồn
gốc xã hội.
* Nguồn gốc nhận thức
Nhận thức thế giới là một nhu cầu tự nhiên, khách quan của con người. Về mặt lịch
sử, tư duy huyền thoại và tín ngưỡng nguyên thủy là loại hình triết lý đầu tiên mà con
người dùng để giải thích thế giới bí ẩn xung quanh. Người nguyên thủy kết nối những hiểu
biết rời rạc, mơ hồ, phi lôgích... của mình trong các quan niệm đầy xúc cảm và hoang
tưởng thành những huyền thoại để giải thích mọi hiện tượng. Đỉnh cao của tư duy huyền
thoại và tín ngưỡng nguyên thủy là kho tàng những câu chuyện thần thoại và những tôn
9
giáo sơ khai như Tô tem giáo, Bái vật giáo, Saman giáo. Thời kỳ triết học ra đời cũng là
thời kỳ suy giảm và thu hẹp phạm vi của các loại hình tư duy huyền thoại và tôn giáo
nguyên thủy. Triết học chính là hình thức tư duy lý luận đầu tiên trong lịch sử tư tưởng
nhân loại thay thế được cho tư duy huyền thoại và tôn giáo.
Trong quá trình sống và cải biến thế giới, từng bước con người có kinh nghiệm và có
tri thức về thế giới. Ban đầu là những tri thức cụ thể, riêng lẻ, cảm tính. Cùng với sự tiến
bộ của sản xuất và đời sống, nhận thức của con người dần dần đạt đến trình độ cao hơn
trong việc giải thích thế giới một cách hệ thống
Để xem full tài liệu Xin vui long liên hệ page để được hỗ trợ
:
https://www.facebook.com/garmentspace/
https://www.facebook.com/thuvienluanvan01
HOẶC
https://www.facebook.com/thuvienluanvan01
https://www.facebook.com/thuvienluanvan01
tai lieu tong hop, thu vien luan van, luan van tong hop, do an chuyen nganh
CHUYÊN ĐỀ BỒI DƯỠNG HỌC SINH GIỎI KHOA HỌC TỰ NHIÊN 9 CHƯƠNG TRÌNH MỚI - PHẦN...
C6 Continuous System Design
1. CƠ SỞ ĐIỀU KHIỂN TỰ ĐỘNG TS NGUYỄN ĐỨC THÀNH CHỦ BIÊN
CHƯƠNG 6
THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
6.1 KHÁI NIỆM
Cho đối tượng điều khiển có hàm truyền G(s)=
( )
( )
Y s
U s
, tín hiệu vào u(t) gọi là tín
hiệu điều khiển, tín hiệu ra y(t) gọi là tín hiệu được điều khiển. Nếu u(t),y(t) là vô
hướng ta gọi là đối tượng SISO (single input single output), nếu u(t),y(t) là vector ta
gọi là đối tượng MIMO (multi input multi output).
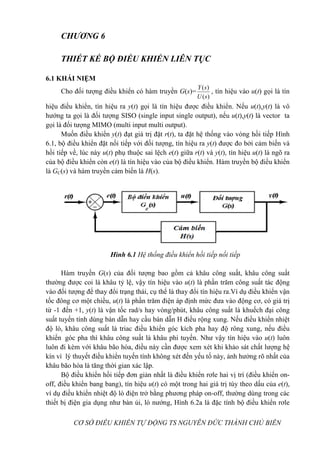
Muốn điều khiển y(t) đạt giá trị đặt r(t), ta đặt hệ thống vào vòng hồi tiếp Hình
6.1, bộ điều khiển đặt nối tiếp với đối tượng, tín hiệu ra y(t) được đo bởi cảm biến và
hồi tiếp về, lúc này u(t) phụ thuộc sai lệch e(t) giữa r(t) và y(t), tín hiệu u(t) là ngõ ra
của bộ điều khiển còn e(t) là tín hiệu vào của bộ điều khiển. Hàm truyền bộ điều khiển
là GC(s) và hàm truyền cảm biến là H(s).
Hình 6.1 Hệ thống điều khiển hồi tiếp nối tiếp
Hàm truyền G(s) của đối tượng bao gồm cả khâu công suất, khâu công suất
thường được coi là khâu tỷ lệ, vậy tín hiệu vào u(t) là phần trăm công suất tác động
vào đối tượng để thay đổi trạng thái, cụ thể là thay đổi tín hiệu ra.Ví dụ điều khiển vận
tốc đông cơ một chiều, u(t) là phần trăm điện áp định mức đưa vào động cơ, có giá trị
từ -1 đến +1, y(t) là vận tốc rad/s hay vòng/phút, khâu công suất là khuếch đại công
suất tuyến tính dùng bán dẫn hay cầu bán dẫn H điều rộng xung. Nếu điều khiển nhiệt
độ lò, khâu công suất là triac điều khiển góc kích pha hay độ rông xung, nếu điều
khiển góc pha thì khâu công suất là khâu phi tuyến. Như vậy tín hiệu vào u(t) luôn
luôn đi kèm với khâu bão hòa, điều này cần được xem xét khi khảo sát chất lượng hệ
kín vì lý thuyết điều khiển tuyến tính không xét đến yếu tố này, ảnh hưởng rõ nhất của
khâu bão hòa là tăng thời gian xác lập.
Bộ điều khiển hồi tiếp đơn giản nhất là điều khiển rơle hai vị trí (điều khiển on-
off, điều khiển bang bang), tín hiệu u(t) có một trong hai giá trị tùy theo dấu của e(t),
ví dụ điều khiển nhiệt độ lò điện trở bằng phương pháp on-off, thường dùng trong các
thiết bị điện gia dụng như bàn ủi, lò nướng, Hình 6.2a là đặc tính bộ điều khiển rơle
2. CHƢƠNG 6
160
hai vị trí, Hình 6.2b là đặc tính bộ điều khiển rơle hai vị trí có trễ để tránh sự đóng cắt
liên tụccòn Hình 6.2c là đặc tính bộ điều khiển rơle ba vị trí (rơle có vùng chết).
Hình 6.2Đặc tính bộ điều khiển rơle on-off
Ví dụ 6.1: Điều khiển nhiệt độ hai vị trí lò nhiệt,hàm truyền lò nhiệt G(s)=
s
e s
201
250 2
, u(t)=1 khi e(t)>0, u(t)=0 khi e(t)<0, tín hiệu đặt là 100o
C, dùng Simulink ta
được đáp ứng Hình 6.3, nhiệt độ dao động quanh giá trị đặt với biên độ ±13o
C, bộ điều
khiển này hoạt động đơn giản với cơ cấu cảm biến và đóng cắt nhiệt độ là thanh lưỡng
kim (thermostat). Tất nhiên là với yêu cầu độ chính xác cao ta phải dùng bộ điều khiển
tinh vi hơn.
Hình 6.3 Đáp ứng nhiệt độ và tín hiệu điều khiển của bộ điều khiển hai vị trí
Hình 6.4Rơle 2 vị trí
3. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
161
Hàm truyền kín Hình 6.1 có thể có các zero ảnh hưởng chất lượng điều khiển, để
khử zero ta dùng sơ dồ Hình 6.5 với bộ lọc trước (Pre Filter)(xem mục 5.4), chú ý là
bộ lọc trước sẽ gây ra thêm trễ pha giữa tín hiệu ra và vào. Bộ lọc trước còn có tác
dụng bù ảnh hưởng của H(s), bảo đảm y(t) tiệm cận r(t).
Hình 6.5 Điều khiển nối tiếp và lọc trƣớc
Khi thay đổi giá trị đặt r(t) đột ngột, sai số cũng thay đổi đột ngột , do đó tạo vọt
lố ở tín hiệu ra với hệ có bậc ≥2, để tránh hiện tượng này ta dùng bộ lọc thấp qua ở tín
hiệu đặt, độ dốc sẽ nhỏ hơn và giảm vọt lố, hoặc tín hiệu đặt sẽ đi theo hàm dốc khi
thay đổi giá trị đặt (Hình 6.6). Sơ đồ Hình 6.7 tạo tín hiệu V0 tăng hay giảm theo hàm
dốc với độ dốc 1/R1C1đến giá trị đặt Vi.
Hình 6.6 Thay đổi độ dốc khi thay đổi giá trị đặt để tránh vọt lố
Hình 6.7 V0 đi theo hàm đốc đến giá trị đặt Vi
Hệ thống điều khiển Hình 6.1 và Hình 6.5 có một vòng hồi tiếp bên ngoài, thực
tế có thể có nhiều vòng hồi tiếp bên trong, lấy ví dụ điều khiển vị trí động cơ ta có thể
thiết kế đến ba vòng gồm vòng điều khiển dòng điện, sau đó là vòng điều khiển vận
4. CHƢƠNG 6
162
tốc và ngoài cùng là vòng điều khiển vị trí, sử dụng nhiều vòng hồi tiếp giúp chất
lượng điều khiển tốt hơn và ta có thể chọn nhiều chỉ tiêu chất lượng (Hình 6.8).
Hình 6.8 Điều khiển hai vòng hồi tiếp
Việc khảo sát thiết kế bộ điều khiển theo phương pháp cổ điển thường tính bằng
tay, dùng biểu đồ Bode và quỹ tích nghiệm do hạn chế về khả năng tính toán, hiện nay
công cụ máy tính dồi dào nên việc thiết kế sử dụng chủ yếu là tính toán và mô phỏng
trên máy tính với các phần mềm hỗ trợ, đặc biệt là Matlab Simulink.
Một phương pháp thiết kế hiện đại là dùng phương trình trạng thái.Trường hợp
biểu diễn hệ thống bằng phương trình trạng thái
x Ax Bu
y Cx
Ta hồi tiếp trạng thái x theo công thức u=r-Kx(Hình 6.9)
Hình 6.9 Điều khiển hồi tiếp trạng thái
Sơ đồ điều khiển rất đa dạng, không thể liệt kê hết trong giáo trình cơ sở.
Thiết kế hệ thống điều khiển gồm các bước sau:
- Tính hàm truyền đối tượng muốn điều khiển thông qua tính toán hay/và thực
nghiệm,
- Lập bảng yêu cầu về chỉ tiêu chất lượng,
- Chọn bộ điều khiển,
- Tính thông số bộ điều khiển,
5. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
163
- Mô phỏng và chỉnh sửa,
- Thực nghiệm điều khiển và chỉnh sửa.
Matlab có công cụ SISO Design Tool giúp việc thiết kế rất dễ dàng, các chỉ tiêu
thiết kế trong cõi thời gian bao gồm độ vọt lố, thời gian xác lập, thời gian tăng, sai số
xác lập… .các chỉ tiêu thiết kế trong cõi tần số gồm băng thông, dự trữ biên và dự trữ
pha..
Phần tiếp theo ta khảo sát các phương pháp điều khiển PID, sớm trễ pha, đặt cực.
6.2 ĐIỀU KHIỂN PID
Điều khiển PID rất thông dụng trong điều khiển công nghiệp, có bốn dạng là điều
khiển P, PI, PD và PID.
6.2.1 Điều khiển tỷ lệ P
Tín hiệu ra bộ điều khiển tỷ lệ với sai lệch, u(t)=Kpe(t), bộ điều khiển không tăng
bậc hệ thống, do đó sai số xác lập với hàm nấc
- Khác 0 với hệ bậc 0, giảm khi tăng Kp,
- Bằng 0 với hệ bậc cao hơn, tăng Kp gây ra tăng POT.
Bộ tỷ lệ điện tử thường được thực hiện bằng OPAMP theo sơ đồ Hình 6.10
Hình 6.10 Mạch Khuếch đại
Ví dụ 6.2: Xét hệ bậc nhất
sT
K
1
, hàm truyền hệ kín là
sTKK
KK
P
P
1
, sai số
xáclập (ssxl) với hàm nấc là
P1
1
KK
giảm khi tăng Kp, thời hằng hệ thống kín là
P1 KK
T
Tk
nhanh hơn hệ hở (Hình 6.11). Khi PK lớn bộ điều khiển có đặc tính
giống điều khiển on-off, với hệ thống vật lý thực tế tín hiệu điều khiển u(t) bị giới hạn
ở mức trên và dưới, nghĩa là khi mô phỏng ta phải thêm bộ bão hòa vào sau bộ điều
khiển. Việc khảo sát hệ thống với bão hòa được thực hiện dễ dàng với Simulink (Hình
6.12).
6. CHƢƠNG 6
164
Hình 6.11 Hệ kín không có khâu bão hòa , KKp=250, T=20sec
Hình 6.12 Hệ kín có khâu bão hòa , KKp=250, T=20sec, mức bão hòa trên là 1,
dƣới là 0
Ví dụ 6.3: Xét hệ bậc nhất có trễ mô phỏng lò nhiệt
sT
Ke ds
1
, , đặc điểm của điều
khiển nhiệt độ là tăng nhiệt độ bằng cách điều khiển công suất điện nhưng làm nguội
lại chỉ có thề là cắt công suất điện và chờ nhiệt độ giảm xuống, tín hiệu điều khiển là
u(t) có giá trị từ 0 đến 1 biểu thị công suất vào lò từ 0 đến Pmax, nhiệt độ tối đa là Ko
, ta
dùng xấp xỉ Padé của khâu trễ ( mục 2.11)
2
1
2
1
1 d
s
d
s
sT
K
, hệ hở có hai cực âm và một
zero dương, do đó khi KKp lớn hệ kín có thể mất ổn định, phương trình đặc tính là
2
( (1 p)) 1 p 0
2 2
d d
T s T KK s KK , vậy khi chọn KKp<1+
d
T2
thì hệ thống ổn định.
Như vậy khâu trễ đã làm cho hệ bậc nhất có thể mất ổn định nếu ta chọn thông số bộ
điều khiển không phù hợp (Hình 6.13). Giảm Kp hệ kín ổn định (Hình 6.14).
Hệ thống thực tế với khâu bão hòa không có dao động do tín hiệu u(t) bị hạn biên
ở 0 và 1 (Hình 6.15).
Ví dụ 6.4: Ta trở lại bài toán điều khiển vận tốc động cơ một chiều đã được khảo
sát sơ lược ở Ví dụ 5.6. Đầu tiên ta sử dụng bộ điều khiển tỷ lệ Kp.
Hàm truyền vận tốc là (phương trình 6.1):
7. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
165
Hình 6.13 Hệ hở bậc nhất có trì hoãn 2 sec, hệ kín không ổn định với Kp=1
Hình 6.14 Hệ hở bậc nhất có trì hoãn 2 sec, hệ kín ổn định với Kp=0.05
Hình 6.15 Hệ thống Ví dụ 6.3 với khâu bão hòa, Kp=0.5
Hình 6.16 Hệ thống Ví dụ 6.3 với khâu bão hòa, Kp=0.05
8. CHƢƠNG 6
166
01
2
2
010
22
)()()(
)(
)()()(
)(
asasa
sTcscsVb
KbRsJRbLsJL
sTsLRsKV
s la
aaaa
Laaa
(6.1)
Vận tốc động cơ vòng hở có giá trị ở xác lập ωxl=
0
00
a
Tcvb La
rad/s , valà điện áp
cung cấp cho động cơ có giá trị giới hạn bởi điện áp nguồn là ±Vmax, vận tốc động cơ
tỷ lệ thuận điện áp đặt và tỷ lệ ngược moment tải.
Với các thông số động cơ
JmMoment quán tínhrotor 0.01 kg.m^2
b Hằng số ma sát nhớt 0.1 N.m.s
Ke Hằng số điện động cơ 0.01 V/rad/sec
Km Hằng số cơ động cơ0.01 N.m/Amp
Ra Điện trở dây quấn1 Ohm
LaĐiện cảm dây quấn 0.5 H
Hàm truyền hở:
100100600050
)()501()(010
)( 2
...
..
ss
sTssV
s La
Hàm truyền vận tốc vòng kín:Ω(s)=
tp
ltp
KKbasasa
sTcscsKKb
001
2
2
01R0 )()()(
Vận tốc động cơ vòng kín ở xác lập phụ thuộc vận tốc đặt ωRvà moment tải TL
ωxl=
tp
Ltp
KKba
TcKKb
00
0R0
Phần trăm ssxl là
tpR
ss
KKba
ae
00
0
,
Suy giảm vận tốc do tải TLgiảm di so với trường hợp vòng hở.
Muốn giảm ssxl ta phải tăng Kp , tuy nhiên hệ số đệm lại giảm, do có hai cực
phức làm xuất hiện vọt lố của vận tốc.
Ví dụ 6.5: Điều khiển vị trí động cơ
Hàm truyền vị trí vòng hở:
}{
)()()(
)(
01
2
2
010
asasas
sTcscsVb
s La
Hàm truyền vị trí vòng kín:
P
LRP
Kbsasasa
sTcscssKb
s
00
2
1
3
2
010 )()())((
)(
Sai số xác lập với hàm nấc θRlà 0 nhưng có ssxl với nhiễu loạn TL, khi tăng KP hệ
thống trở nên mất ổn định.
Ta khảo sát đáp ứng dùng Simulink (Hình 6.17, 6.18), giá trị đặt là 1rad, sau 6s
tác động moment tải 0.2Nm, ssxl với giá trị đặt là 0 nhưng khi có tải sai số không triệt
tiêu. Các ví dụ trên cho thấy điều khiển tỷ lệ không bảo đảm chất lượng điều khiển.
Mục 6.6.2 sau đây trình bày điều khiển PI tỷ lệ tích phân.
9. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
167
Hình 6.15 Điều khiển tỷ lệ vận tốc động cơ DC
Hình 6.16 Điều khiển vị trí tỷ lệ liên tục
Hình 6.17Sơ đồ Simulink điều khiển tỷ lệ vị trí liên tục
10. CHƢƠNG 6
168
Hình 6.18 Đáp ứng nấc của (a) vị trí và (b) vận tốc
6.2.2 Điều khiển PI
Hàm truyền p
I
K
s
K
= )
1
1(
sT
K
s
KsK
I
p
Ip
gồm khâu tỷ lệ và khâu tích
phân ghép song song, hoặc khâu vi phân ghép nối tiếp với khâu tích phân.
Khâu PI có thể thực hiện bằng sơ đồ OPAMP sau
Hình 6.19 Khối so sánh và PI dùng OPAM
Khâu PI giúp tăng loại hệ thống từ loại thấp sang loại cao hơn, do đó bảo đảm ít
nhất ssxl với hàm nấc bằng 0, duy trì tín hiệu điều khiển mặc dù sai số bằng 0, do đó
chống được nhiễu loạn, thêm vào một zero
P
I
I K
K
T
1
do đó tăng tính ổn định của
hệ thống bậc cao, giảm vọt lố nếu chọn hệ số phù hợp (xem 5.4.1).
Ví dụ 6.6: Cho đối tượng bậc nhất
Ts
K
1
, tính luật điều khiển PI
Hàm truyền vòng thuận
)Ts(s
KsKK
1
)( IP
. Nếu chọn T
K
K
I
P
thì ta triệt tiêu cực và
hàm truyền vòng thuận là
s
KKI
. Hàm truyền hệ kín:
I
I
KKs
KK
, ssxl=0
Trường hợp khác, hàm truyền hệ kín
IP
2
IP
)1(
)(
KKsKKTs
KsKK
Ta nhận thấy tăng KI cực hệ kín có khuynh hướng tiến về cực phức, còn tăng KP
cực tiến về cực thực. Nên chọn zero –KI/KP gần gốc và các giá trị KI, KPnhỏ.
11. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
169
Việc tính toán các thông số thời gian như độ vọt lố và thời gian xác lập khá phức
tạp vì phụ thuộc cực và zero hệ kín và do đó phụ thuộc bốn thông số.
Một cách thiết kế là chọn trước cực hệ kín dựa vào đáp ứng thời gian hệ bậc hai
IP
2
I
1 KKs)KK(Ts
KK
ta tính được KP, KI, sau đó dùng bộ lọc trước
I
P
1
1
K
K
s
để
khử zero ở tử số.
Cho T=20s, K=250, chọn cực hệ kín có ζ=1, ts=20s=
n
.
83395
(pt 3.7), suy ra
ωn=0.2917rad/s
Chọn ωn=0.3rad/s,
Đa thức đặc tính:
090602512)512.050( 22
nn
2
IP
2
.s.sssK.sK.s
Cân bằng hai vế I512 K. =0.09, P512.050 K. =0.6, suy ra
KI=0.0072, KP=0.044
Với sơ đồ Hình 6.19, 1/CR1=0.0072, chọn C=100MF, R1=1.3889MΩ,
R2=61.12KΩ
Hàm truyền hệ kín:
09060
090550
2
.s.s
.s.
Do có zero nên đáp ứng nấc có vọt lố
Ta dùng bộ lọc trước hàm truyền P(s)=
s.
K
K
s 11161
1
1
1
I
P
để triệt tiêu vọt lố
Nếu xét thêm đáp ứng với hàm dốc, hệ thống có sai số là 1/KKI, sai số này không
thể điều chỉnh được, muốn khắc phục ta phải dùng điều khiển PID.
Hình 6.20 Đáp ứng nấc Ví dụ 6.6
12. CHƢƠNG 6
170
Ví dụ 6.7 :Điều khiển PI hệ bậc hai
01
2
01
asas
bsb
Hàm truyền vòng hở:
)(
))(/(
01
2
01PIP
asass
bsbKKsK
Hàm truyền kín:
0I0P1I0
2
P11
3
01IP
)()(
))((
bKsbKbKasKbas
bsbKsK
Hệ thống ổn định khi )( P11 Kba )( 0P1I0 bKbKa > 0IbK
Nguyên tắc thiết kế là ta chọn cặp cực chủ yếu quyết định POT và thời gian xác
lập, một cực thực âm ở xa cặp cực chủ yếu để ít ảnh hưởng đến đáp ứng quá độ , tuy
nhiên do chỉ có hai tham số KI, KP nên bài toán khó giải bằng giải tích , ta có thể dùng
phương pháp quỹ tích nghiệm để giải.
6.2.3 Thiết kế điều khiển PI hệ bậc hai dùng quỹ tích nghiệm
Hệ hở có ba cực, một cực p0 ở gốc do khâu PI, hai cực của đối tượng p1p2, một
zero z1do khâu PI có tọa độ z1= -KI/KP chưa xác định, nếu b1≠ 0 thì có thêm một zero
z2, hệ thống kín có một cực kín tiến về -∞, hai cực còn lại tiến về hai zero; nếu b1=0
chỉ có một zero, hai cực kín phức tiến về ∞, cực còn lại tiến về zero z1.
Khi thiết kế dùng quỹ tích nghiệm (QTN), ta dùng thông số chạy là KP, còn tỷ số
KI/KPcố định, các bước thiết kế như sau:
- Chọn cặp cực p* chủ yếu dựa vào POT và thời gian xác lập
- Chọn zero z1 theo nguyên tắc tổng các đối số bằng -180o
)()()(-180)( 221
o
1 z*pp*pp*p*pz*p
Tính độ lợi Kp ở cực chủ yếu theo nguyên tắc suất hàm truyền vòng hở bằng 1
Đối tượng là lò nhiệt có hàm truyền
)21)(201(
250
ss
, tín hiệu điều khiển u(t) có
giá trị từ 0 đến 1.
Ba cực là 0, -0.05, -0.5, một zero là z1=-KI/KP.
Chọn cực chủ yếu để đáp ứng có vọt lố nhỏ hơn 5%, từ Hình 3.10 suy ra ζ=0.7,
thời gian xác lập 20s, suy ra 4/ζωn=20, ωn=0.2857rad/s, chọn ωn=0.3rad/s, hai cực là -
0.21±0.2142j , lấy số chẵn hai cực là -0.2±0.2j.
Góc từ cực -0.2+0.2j đến z1là
θ=-180o
+atan2d(0.2,-0.2) +atan2d(0.2,-0.2+0.05) +atan2d(0.2,-0.2+0.5)
= -180o
+135o
+126.8699o
+33.6901o
=115.56o
1z20
20
.
.
tand(115.56)=-2.0909, suy ra z1= -0.1043
13. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
171
Hàm truyền vòng hở lúc này là
)21)(201(
)10430(250 p
sss
.sK
,ở điểm -0.2+0.2j suất là
1
|)0.2j+(-0.221(||)0.2j+(-0.2201||0.2j+-0.2|
|104300.2j+-0.2250 p
.|K
Suy ra Kp =0.0184, KI=0.1043*0.0184=0.0019, đáp ứng trình bày ở Hình6.21.
Hình 6.21 Đáp ứng nấc điều khiển PI lò nhiệt
Tính toán trên Matlab cho thấy có cực thực -0.1471 và hai cực phức -
0.2015±j0.2004, vậy cực phức không phải là cực chủ yếu và đáp ứng không đúng với
tính toán, tuy nhiên chất lượng chấp nhận được với thời gian xác lập 30s và không vọt
lố. Với hệ thống thực tế có khâu bão hòa, sẽ ảnh hưởng đáp ứng, ta kiểm tra dùng
simulink (Hình 6.22).
Hình 6.22 Sơ đồ Simulink điều khiển PI nhiệt độ
Kết quả mô phỏng Hình 6.22 cho thấy hệ thống làm việc trong vùng tuyến tính.
Mục sau sẽ khảo sát bộ điều khiển sử dụng kết hợp ba bộ điều khiển P, I, và D, đó là
bộ điều khiển PID.
1
52025*20.2
22170250 p
.*
.*K
14. CHƢƠNG 6
172
Hình 6.22 Kết quả mô phỏng
6.2.4 Điều khiển PID
Điều khiển PID thường được sử dụng trong thực tế, thống kê cho thấy bộ PID
chiếm hơn 90% các bộ điều khiển. Khối PID thực hiện phép toán trên sai số e(t) và
cho tín hiệu ra u(t)
u(t)=KPe(t)+KI )()(
0
D te
dt
d
Kde
t
Có hai dạng PID là song song và nối tiếp. Hàm truyền PID dạng song song:
D
I
P sK
s
K
K =
s
KsKsK
sT
sT
K IP
2
D
D
I
P )
1
1(
TI=
I
P
K
K
gọi là thời hằng tích phân, TD=
P
D
K
K
gọi là thời hằng vi phân
Hàm truyền PID dạng nối tiếp gồm khối PD nối tiếp PI:
(1+KD1s)(KP2+
s
K 2I
) (6.1)
KP=KP2+KD1KI2, KI=KI2, KD=KP2KD1
I
DI
2
PP
1D
2
4
K
KKKK
K
, KP2=KP-KD1KI, DI
2
P 4 KKK >0 (6.2)
Hình 6.23a là sơ đồ PID song song với hàm truyền 24
311
2 1
CsR
RsCR
R
, Hình
6.23b là sơ đồ PID nối tiếp với hàm truyền )1)(
1
( 11
211
2
CsR
CsRR
R
.
15. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
173
Hình 6.23Mạch PID dùng OPAMP
Các giá trị thông số PID ảnh hưởng đến đáp ứng hệ thống theo Bảng 6.1
Bảng 6.1 Ảnh hƣởng tƣơng đối của các thông số PID
Khối PID đưa thêm hai zero và một cực vào hàm truyền, do đó hàm truyền đối
tượng cần có (bậc mẫu- bậc tử) ≥2, vị trí zero đóng vai trò quan trọng trong đáp ứng
quá độ, khâu vi phân có thể cho ngõ ra khá lớn khi tín hiệu vào thay đổi đột ngột hay
do nhiễu, đặc biệt khi tín hiệu đặt là hàm nấc thì khâu vi phân sẽ cho ra xung Dirac
biên độ vô cùng ở thời điểm bắt đầu, vì vậy thực tế thường thêm khâu quán tính cho
khối vi phân để lọc bớt đỉnh, lúc này hàm truyền PID trở thành
D
P
I D
1
(1 )
1
sT
K
T s s T
(6.3)
Nếu tín hiệu đặt là hằng số, đôi khi người ta chỉ đạo hàm tín hiệu ra để tránh
xung đạo hàm khi thay đổi tín hiệu đặt theo biểu thức
u(t)=KPe(t)+KI
t
D
0
d
( )d ( )
dt
e K y t (6.4)
Một số trường hợp để tránh vọt lố do tín hiệu đặt thay đổi nhiều, ta dùng kỹ thuật
setpoint weighting thay đổi tầm quan trọng của tín hiệu đặt trên tín hiệu ra PID
u(t)=KP {br(t)-y(t)}+KI
t
D
0
d
( )d { ( ) ( )}
dte K cr t - y t (6.5)
b và c là các hằng số từ 0 đến 1.
6.2.5 Thiết kế PID dùng phƣơng pháp giải tích
Ví dụ 6.7: Đối tượng có hàm truyền
10025
80
2
ss
, tính điều khiển PID sao
Vọt lố Thời gian xác lập
Thời gian
tăng
Sai số xác lập
với hàm nấc
Ổn định
Tăngx KP Tăng Ít thay đổi Giảm Giảm Kém hơn
Tăng KI Tăng Tăng (Hệ thống chậm hơn) Giảm Triệt tiêu Tốt hơn
Tăng KD Giảm Giảm ( Hệ thống nhanh hơn) Ít thay đổi Không ảnh hưởng Tốt hơn
16. CHƢƠNG 6
174
cho sai số xác lập với hàm dốc là 1%, hệ kín có cặp cực chủ yếu -8
Ssxl với hàm dốc: 1/(80KI/100)=0.01, suy ra KI=125
Đa thức đặc tính hệ kín: IP
2
D
3
80)80100()8025( KsKsKs
Đa thức đặc tính hệ kín mong muốn: (s+p)(s+8)2
=s3
+(16+p)s2
+(64+16p)s+64p
Suy ra D8025 K =16+p, P80100 K =64+16p, I80K =64p
p=156.25, Kp=30.85, KD=1.8406
Với các giá trị trên ta chạy mô phỏng, sau đó có thể chỉnh một số thông số, giảm
KD giảm hệ số đệm, tăng Kp tăng vọt lố, tăng tín hiệu điều khiển.
Kết quả mô phỏng Hình 6.24 (a) dùng các giá trị PID ở trên, (b) KD=1.2,
(c)KP=40, KD=1.2
Ví dụ 6.8: Đối tượng có hàm truyền
)10025(
80
2
sss
,tính điều khiển PID sao
cho sai số xác lập với hàm parabole là 1%, hệ kín có cực thật bậc bốn
Ssxl với hàm parabole là 1/(80KI/100)=0.01 suy ra KI=125
Đa thức đặc tính hệ kín IP
2
D
34
8080)80001(25 KsKsKss
Hình 6.24 Đáp ứng Ví dụ 6.7
Chọn cực bội bốnlà –a
Đa thức đặc tính hệ kín mong muốn (s+a)4
=s4
+4as3
+6a2
s2
+4a3
s+a4
Suy ra a=6.25, KI= 19.0735,KP= 12.2070, KD= 1.6797
Hàm truyền hệ kín 4
2
256
19.0735)12.207s1.6797s80
).s(
(
Hệ thống có ssxl bằng 0 với hàm nấc và hàm đốc, tuy nhiên đáp ứng với hàm nấc
có vọt lố lớn do zero, để giảm vọt lố, nếu tín hiệu vào là hàm nấc ta thêm khâu lọc
17. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
175
trước hàm truyền
2
1
1
s
K
K
s
K
K
I
D
I
P
, nếu tín hiệu vào là hàm đốc ta không dùng lọc
trước
Hình 6.25 Đáp ứng Ví dụ 6.8
6.2.6 Thiết kế dùng tiêu chuẩn ITAE
Ta tìm đa thức mẫu số của hàm truyền hệ kín, sau đó cân bằng với đa thức theo
chuẩn ITAE để tính các hệ số PID
Ví dụ 6.9:xét đối tượng
ssssss 56
1
)5)(1(
1
23
, hàm truyền hệ kín
IP
2
D
34
IP
2
D
56 KsKs)K(ss
KsKsK
,
Tham khảo Bảng 5.3, mẫu số hàm chuẩn là
432234
648234739531 nnnn s.s.s.s
6=1.953ωn, 5+KD=3.347ωn
2
, KP=2.648ωn
3
, KI=ωn
4
ωn= 3.0722, KD=26.5904, KP=76.7832, KI=89.0836,
KD/KI=0.2985, KP/KI= 0.8619
Tham khảo Bảng 5.4, mẫu số hàm chuẩn là
4 3 2 2 3 4
2.41 4.93 5.14 n n n ns s s s
6=2.41ωn, 5+KD=4.93ωn
2
, KP=5.14ωn
3
, KI=ωn
4
ωn=2.8037, KD=33.7534, KP= 113.2812, KI=61.7911,
KD/KI= 0.5463, KP/KI=1.8333.
Mô phỏng hệ thống trình bày ở Hình 6. 26 cho thấy đáp ứng rất tốt nhưng có độ
trễ so với tín hiệu vào hàm đốc và thời gian xác lập tăng lện do ảnh hưởng của bộ lọc
trước.
18. CHƢƠNG 6
176
Hình 6. 26 Điều khiển PID theo ITAE Ví dụ 6.9
6.2.7 Phƣơng pháp Ziegler Nichols
Phương pháp ZN (J. G. Ziegler and N. B. Nichols: Optimum Settings for
AutomaticControllers, Trans. ASME, Vol. 64, 1942) giúp chọn các thông số PID
nhanh chóng dựa vào bảng tra, đặc điểm của phương pháp là đáp ứng có vọt lố cao.
Có hai phương pháp là phương pháp vòng hở và phương pháp vòng kín.
a/ Phƣơng pháp vòng hở (pp ZN thứ nhất)
Phương pháp này dùng cho đối tượng ổn định, không chứa khâu tích phân, có trì
hoãn
Ts
Ke Ls
1
( ví dụ lò nhiệt) hay đáp ứng nấc vòng hở có dạng chữ S (ví dụ hàm truyền
bậc ba
)1)(1)(1( 111 sTsTsT
K
hay cao hơn, phương pháp không áp dụng cho hệ bậc
hai.
Nguyên tắc của phương pháp là áp dụng tín hiệu hàm nấc biên độ Uvào đối
tượng vòng hở và ghi lại đáp ứng ra, ví dụ với lò nhiệt ta đóng điện vào lò và ghi nhiệt
độ, tín hiệu vào là hàm nấc biên độ 1. Đáp ứng nấc đạt xác lập K sau một thời gian
(xem H 6.27)
Từ đường cong đáp ứng nấc ta xác định giá trị xác lập K, biên độ tín hiệu nấc U,
thời gian trì hoãn L và thời hằng tương đương T,
- Với khâu quán tính có trễ L là thời điểm kể từ khi có tín hiệu vào đến khi tín
hiệu ra >0 (điểm A) , để xác định T ta kẽ tiếp tuyến với đáp ứng tại A, cắt đường
ngang K tại B, chiếu xuống trục hoành tại C,
- Với đáp ứng chữ S ta tìm điểm uốn T, kẽ tiếp tuyến từ đó xác định các điểm A,
C,
- Tính độ dốc của tiếp tuyến R=K/T.
19. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
177
Hình 6.27 Tính thông số từ thực nghiệm
Các giá trị KP, TI, TD được cho trong Bảng 6.2sau
Luật KP TI TD KI KD
Điều khiển P U/LR ∞ 0
Điều khiển PI 0.9 U/LR 3.3L 0 0.27U/RL2
Điều khiển PID 1.2 U/LR 2L 0.5L 0.6U/RL2
0.6 U/R
Bảng 6.2 Thông số điều khiển PID dùng tiêu chuẩn Zigler Nichols
Với đối tượng
Ts
Ke Ls
1
bộ điều khiển PI là
s
L
s
KL
T.
sKL
T.
KL
T. 10
3
9027090
2
và bộ
điều khiển PID là
s
L
s
K
T.
K
Ts.
sKL
T.
KL
T.
2
2
)
1
(
60606021
.
Ta thử mô phỏng với giá trị K=250, L=5s, T=20s, tín hiệu đặt là 100o
C từ 0 đến
80s sau đó là 80o
C, khâu bão hòa có hai mức 0 và 1
Tra bảng được thông số khâu PI: KP=0.0144, KI = 8.6400e-04/s, và thông số
khâu PID: KP=0.0192, KI = 0.0019/s, KD = 0.0480s
Mô phỏng PI dùng Simulink khi không có khâu lọc trước vọt lố là 30%, không
chấp nhận được, ta thêm bộ lọc trước thấp qua
I1
1
sT
thì vọt lố được loại bỏ
Bây giờ điều khiển PID khi không có khâu lọc trước vọt lố là 50%, không chấp
nhận được, ta thêm bộ lọc trước thấp qua
DI
2
I1
1
TTssT
thì vọt lố được giảm còn
6%
20. CHƢƠNG 6
178
Kết luận là phương pháp ZN cho vọt lố khá lớn nên khi dùng ta phải thêm bộ lọc
trước, phương pháp ZN có ưu điểm là giúp chọn thông số PID dễ dàng.
Hình 6.28 Điều khiển nhiệt độ dùng ZN
b/ Phƣơng pháp vòng kín (pp ZN thứ hai)
Phương pháp này sử dụng với hệ có trì hoãn hay hàm truyền bậc ba hay cao hơn
có thể mất ổn định, hệ thống được điều khiển vòng kín với khâu tỷ lệ, tăng KP đến khi
hệ thống ở biên giới ổn định, tín hiệu ngõ ra bắt đầu dao động quanh giá trị đặt, ta ghi
nhận giá trị KPtới hạn Kcr vàchu kỳ dao động tới hạn Tcr, sau đó tính các giá trị thông
số PID theo Bảng 6.3. Nếu hệ thống không dao động phương pháp không dùng được.
Khi sử dụng thực tế cần cẩn thận vì dao động có thể gây hư hỏng thiết bị.
Luật KP TI TD KI KD
Điều khiển P 0.5 Kcr ∞ 0
Điều khiển PI 0.45 Kcr Tcr /1.2 0 0.54 Kcr/ Tcr
Điều khiển PID 0.6 Kcr 0.5 Tcr TI/4 1.2 Kcr/ Tcr 0.75 Kcr Tcr
Bảng 6.3 Thông số điều khiển PID dùng tiêu chuẩn Zigler Nicholsvòng kín
Nhiều nghiên cứu sau này bổ sung bảng giá trị cho đáp ứng ít vọt lố hơn (Rule-
Based Autotuning Based on Frequency Domain Identification," Anthony S.
McCormack and Keith R. Godfrey, IEEE Transactions on Control Systems
Technology, vol 6 no 1, January 1998)
Luật KP TI TD
Ziegler-Nichols 0.6 Kcr 0.5 Tcr 0.125 Tcr
Pessen Integral Rule 0.7 Kcr 0.4 Tcr 0.15 Tcr
Ít vọt lố 0.33 Kcr 0.5 Tcr 0.33 Tcr
Không vọt lố 0.2 Kcr 0.5 Tcr 0.33 Tcr
Bảng 6.4 Thông số PID qui luật khác
21. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
179
Ví dụ 6.10:Cho đối tượng
1144330
50
)101)(31)(1(
50
23
ssssss
, ta
dùng tiêu chuẩn Routh để tìm Kcr=572/1500=0.3813, Tcr=9.1976s, với PI, KP=0.1716,
KI=0.54 Kcr/ Tcr=0.0224s, với PID KP=0.2288, KI=0.0498, KD=0.2630 (Thông số 1), dùng
Bảng 6.4 hàng cuối KP=0.07626, KI=0.0166, KD=0.2315 (Thông số 2) ta thấy kết quả với
Thông số 2 tốt hơn (Hình 6.29)
Ví dụ 6.11: Xét đối tượng
)5)(1(
1
sss
, ta tính được Kcr=30, Tcr=2.8099. Dựa
vào bảng 6.3 khối PID có hàm truyền
s
.s.
s.
.s.
2
)42351(32236
)351240
4051
1
1(18
,
Hàm truyền kín là
81112183223116
811121832236
234
2
.ss.ss
.ss..
,
Sai số xác lập với hàm nấc và hàm dốc là 0, ta vẽ đáp ứng dùng Matlab. Kết quả
(Hình 6.30) cho thấy vọt lố khá lớn khoảng 60%
Các ví dụ trên cho thấy phương pháp ZN cho vọt lố khá lớn cần có hiệu chỉnh khi
sử dụng.
Hình 6.29Kết quả mô phỏng Ví dụ 6.10 với các bộ thông số khác nhau
22. CHƢƠNG 6
180
Hình 6.30Kết quả mô phỏng Ví dụ 6.11
6.2.8 Thiết kế PID dùng Matlab
a/ Dùng m file
Matlab có các hàm pidstd, pidtune giúp thiết kế khối PID rất dễ dàng
C=pidstd(Kp,Ti,Td,N) tạo khối PID có dạng
1
( ) 1
( / ) 1
D
P
I D
T s
C s K
T s T N s
C=pidstd(Kp) tạo khối điều khiển tỷ lệ
C= pidstd(Kp,Ti) tạo khối điều khiển PI
C=pidstd(Kp,Ti,Td) tạo khối điều khiển PID với N=
C = pidtune(G,TYPE) thiết kế bộ điều khiển PID cho đối tượng có hàm truyền
G. Thông số Type chọn như sau:
TYPE cho biết loại điều khiển, 'P': tỷ lệ, 'I': tích phân, 'PI' :PI, 'PD': PD, 'PDF':PD
với bộ lọc,'PID': PID, 'PIDF' PID với bộ lọc
C = pidtune(G,C0): thiết kế bộ điều khiển PID theo mẫu của khối PID C0
C = pidtune(G,TYPE,WC): thiết kế bộ điều khiển PID sao cho tần số cắt biên là
WC
Options = pidtuneOptions('PhaseMargin',60): chọn dự trữ pha là 60o
C = pidtune(G,..., Options): thiết kế PID để đạt dự trữ pha trong Options
Sau khi đã thiết kế bộ điều khiển ta dùng hàm pidtool(G,C) để chỉnh tinh
Ví dụ 6.12:Thiết kế dùng pidtune
G = tf(1,[1 3 3 1]);
% Design PID with 45 degrees of phase margin
Options = pidtuneOptions('PhaseMargin',45);
[C info] = pidtune(G,'pid',Options)
C =
1
Ki * ---
s
with Ki = 0.225
Continuous-time I-only controller.
info =
23. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
181
Stable: 1
CrossoverFrequency: 0.2105
PhaseMargin: 54.3341
pidtool(G,C)
Hình 6.31 Giao diện PIDTOOL
Hình 6.32 Giao diện PIDTOOL Ví dụ 6.12
24. CHƢƠNG 6
182
b/ Dùng simulink
Ta vẽ sơ đồ trong simulink, sau đó bấm chuột kép vào khối PID để mở cửa sổ
chỉnh thông số PID (xem Hình 6.33)
Hình 6.33 PID Tuning dùng Simulink
6.2.9 Các bộ điều khiển PID công nghiệp
Trong công nghiệp thường sử dụng các bộ điều khiển PID dùng vi điều khiển có
cài đặt PID tuning, dùng được cho nhiều loại đối tượng, có khả năng giao tiếp truyền
thông, dễ sử dụng (Hình 6.34).
Lấy ví dụ bộ điều khiển nhiệt độ PID của hãng OMRON, có chế độ đặt thông số
PID bằng tay hay tự động (Auto Tuning). Hệ kín với bộ điều khiển và đối tượng điều
khiển nhiệt độ được đưa vào chế độ dao động dùng điều khiển relay có trễ, sau đó chu
kỳ và biên độ dao động được ghi nhận để tính thông số PID. Biết biên độ dao động y
và biên độ tín hiệu u (hình chữ nhật) ta suy ra độ lợi tới hạn Kcr=4u/πy. Sử dụng bảng
6.3, 6.4 (hay bảng khác tuỳ hãng), chương trình sẽ tính toán các thông số PID. Sau khi
tính toán xong bộ PID được sử dụng.
25. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
183
Hình 6.34Một số bộ điều khiển PID công nghiệp và AutoTuning
6.3 ĐIỀU KHIỂN SỚM TRỄ PHA
Bộ điều khiển sớm- trễ pha là bộ điều khiển cổ điển thường hay sử dụng trong
các thiết kế cũ, có hàm truyền (6.6)
2 2 2
2 22 2
1
( ) ,
1
1 ( 1)
( ) atan
11
C
C
aTs
G s
Ts
a T a T
G j
aTT
(6.6)
Nếu a>1 , 0)( jGC ta có bộ điều khiển sớm pha (phase lead) vì tín hiệu ra
sớm pha hơn tín hiệu vào.
Zero của khâu sớm pha nằm gần gốc hơn cực.
Nếu a<1, 0)( jGC ta có bộ điều khiển trễ pha (phase lag) vì tín hiệu ra trễ
pha hơn tín hiệu vào, bộ điều khiển trễ pha là lọc thấp qua vì suất giảm khi tần số tăng.
Zero của khâu trễ pha nằm xa gốc hơn cực.
26. CHƢƠNG 6
184
Hình 6.35 Các sơ đồ khâu sớm pha, trễ pha
Sơ đồ Hình 6.35a là khâu sớm pha có hàm truyền
,
)||(1
1
)(
21
1
21
1
RRsC
sCR
RR
R
sGC
(6.7)
sơ đồ (b) là khâu trễ pha có hàm truyền
,
)(1
1
)(
21
2
RRsC
sCR
sGC
(6.8)
sơ đồ (c) có hàm truyền ,
,
1
1
)(
2
1
31
42
c
c
CC
ps
zs
K
sCR
sCR
RR
RR
sG
(6.9)
2
1
3
4
21
,,
1
,
1
R
R
a
R
R
K
CR
p
CR
z Ccc
nếu R1>R2 ta có khâu sớm pha, ngược lại là khâu trễ pha
Giản đồ Bode khâu sớm pha trình bày ở Hình 6.36
Hình 6.36Gỉản đồ Bode khâu sớm pha
27. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
185
Suất khâu sớm pha đi từ 0db đến 20log10adb, hai tần số góc là 1/aT và 1/T, pha
dương có cực đại ở tần số m và có giá trị m . Góc pha là
22
1
)1(
atan
aT
Ta
Lấy đạo hàm biểu thức trong ngoặc của atan ta nhận thấy đạo hàm bằng 0 ở tần
số trung bình nhân hai tần số góc
aT
m
1
(6.10)
và góc pha tương ứng là
a
a
m
2
1
atan (6.11)
a
a
tg m
2
1
)(
suy ra
1
1
)sin(
a
a
m và
1
1
asin
a
a
m
(6.12)
m
m
a
sin1
sin1
Suất tại m là a hay 10log a db. Góc φm tối đa khoảng 65o
.
Khâu hiệu chỉnh sớm pha cung cấp một cực và zero cho hàm truyền vòng hở,
zero ở gần gốc hơn cực, không ảnh hưởng đến sai số xác lập, tăng nhiễu ở tần số cao,
tăng độ vọt lố, giúp giảm thời gian tăng và thời gian xác lập.
Giản đồ Bode khâu trễ pha trình bày ở Hình 6.37
Các giá trị m , m cho ở công thức (6.10,6.11).
Hiệu chỉnhtrễ pha cung cấp cực và zero cho hàm truyền vòng hở, cực gần gốc
hơn zero, giảm sai số xác lập, tăng thời gian xác lập, tăng độ ổn định của hệ thống.
Hình 6.37 Giản đồ Bode khâu trễ pha
28. CHƢƠNG 6
186
Hiệu chỉnh sớm hay trễ pha đều không triệt tiêu sai số xác lập nên thường dùng
với đối tượng có khâu tích phân.
6.3.1 Thiết kế hiệu chỉnh sớm pha
Khâu hiệu chỉnh có dạng(6.9),đối tượng có hàm truyền G(s), ta phải tìm ba thông
số Kc, zc, pc.
a/ Thiết kế dùng quĩ tích nghiệm
- Bước 1: Dựa vào chỉ tiêu độ vọt lố và thời gian xác lập ta tìm hai cực liên hiệp
chủ yếu 2*
2,1 1 nn jp của hệ kín, xét cực *
1p có phần ảo dương ở điểm P.
- Bước 2: Thử dùng điều khiển tỷ lệ, vẽ quỹ tích nghiệm với độ lợi thay đổi xem
có đi qua cực mong muốn,
- Bước 3: Nếu cần bổ chính sớm pha, tính góc = 0)()( *
1
*
1 cc ppzp khâu
sớm pha thêm vào theo công thức (tính chất của quỹ tích nghiệm)
=-180o
+ góc từ cực của G(s) đến *
1p - góc từ zero của G(s) đến *
1p
- Bước 4: Tìm vị trí của zerovà cực khâu bổ chính
*Phƣơng pháp phân giác: (Hình 6.38) cực mong muốn ở điểm P, ta vẽ hai
đường OP và PA, PA song song trục x, vẽ phân giác PB của góc OPA, vẽ hai đường
PC và PD hai bên PB, tạo góc /2 so với PB, hai đường này cắt trục x ở hai điểm C là
cực và D là zero khâu sớm pha.
Các giá trị OD và OC tính như sau (dùng hàm Matlab)
),-1atan2d( 2
APO
, OP= n
Dùng hệ thức lượng trong tam giác OPC:
PCO
OP
OPC
OC
sinsin
, OPC
=
2
, PCO
=
2
Hình 6.38Phƣơng pháp phân giác
Suy ra
2
sin
2
sin
OPOCpC
Tương tự, dùng hệ thức lượng trong tam giác ODP
29. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
187
2
sin
2
sin
OPODzC
*Phƣơng pháp chọn trƣớc vị trí zero:
Có thể đặt zero zcngay bên dưới cặp cực mong muốn *
1p hay ở bên trái hai cực
thật đầu tiên hoặc trùng với một cực của G (triệt tiêu một cực của G), từ đó suy ra cực
pc.
- Bước 5: Tính độ lợi ở *
1p từ đó suy ra KC,
- Bước 6: Kiểm tra lại hằng số sai số KV, nếu không đạt thì tính lại
Ví dụ 6.13Cho
)1(
10
)(
ss
sG , tính bộ điều khiển sớm pha sao cho cực chủ yếu
tương ứng hệ số đệm ,
2
2
tần số n 3rad/sec.
Hệ thống hồi tiếp không có khâu bổ chính có hàm truyền là
10
10
)( 2
ss
sGK ,
hệ số đệm là 0.1581 và tần số dao động n 3.1623 rad/sec, độ vọt lố khá lớn, ta thiết
kế bộ điều khiển sớm pha sao cho cực hệ kín ở 2*
2,1 1 nn jp =-2.1213 j
2.1213
Cực của G là 0 và -1, OP=3 (từ ωn), góc từ cực 0 đến *
1p là =atan2d(2.1213,-
2.1213)=135o
, góc từ cực -1 đến *
1p là atan2d (2.1213,-2.1213+1) = 117.8605o
, ta tính
ra góc mà khâu sớm pha đóng góp là =-180o
+135o
+ 117.8605o
= 72.8605o
Dùng phương pháp đường phân giác ta tính được
5.6421
2
72.8605135
sind
2
72.8605135
sind
3 oo
oo
Cp
1.5952
2
72.8605135
sind
2
72.8605135
sind
3 oo
oo
Cz
Hàm truyền vòng thuận
)6421.5)(1(
)5952.1(10
sss
sK
GG C
C , quỹ tích nghiệm đi qua cực *
1p
vậy ở điểm này |GCG|=1, suy ra 3538.1
)5992.1(10
)6421.5)(1(
*
1
*
1
*
1
*
1
p
ppp
KC
Hàm truyền kín
6.2118.19642.6
6.2154.13
23
sss
s
GK , dùng sơ đồ Hình 6.35c, ta tính
được:
30. CHƢƠNG 6
188
2
1
R
R
a =5.4621/1.5952=3.4241,
chọn R2=1MΩ, R1=3.42MΩ, C=0.1831µF 18.0 µF
clc
close all
zeta=sqrt(2)/2;
wn=3;
pd=-zeta*wn+j*wn*sqrt(1-zeta*zeta);
OP=abs(pd);
alpha=angle(pd)*180/pi
phi=-
180+(angle(pd)+angle(pd+1))*180/pi
pc=OP*sind((alpha+phi)/2)/sind((alpha-
phi)/2)
zc=OP*sind((alpha-
phi)/2)/sind((alpha+phi)/2)
s=tf('s');
g=10/(s*(s+1));
g1=(s+zc)*10/(s*(s+1)*(s+pc));
rlocus(g1);
g2=1/g1;
s=pd;
kc=abs(evalfr(g2,pd))% tính kc
figure;
gk1=feedback(kc*g1,1);
step(gk1);% điều khiển sớm pha
gk=feedback(g,1);
hold
step(gk);% điều khiển tỷ lệ
Hình 6.39 Ví dụ 6.13
Đáp ứng nấc cho ở Hình 6.39 và Hình 6.40 đường (1)
Đáp ứng thay đổi nếu chọn zero khác đi, giả sử chọn zero ngay dưới cực chủ yếu,
zc=OD=2.1313, o
90PCO
72.8605o
=17.1395o
, CD= 6.9109
95)tand(17.13
PD
pc=OC=2.1313+6.9109=9.0422, KC=2.4563, Đáp ứng nấc cho ở Hình 6.35
đường (2)
Cách khác: chọn zero triệt tiêu cực -1 của đối tượng, zc=OD=1,
117.8605o
PCO
72.8605o
=45o
, pc=OC=2*2.1313=4.2626, KC=0.9042 . Đáp ứng nấc
cho ở Hình 6.40đường (3)
Ta nhận thấy không có sự khác biệt lớn về thời gian xác lập ở ba trường hợp. Vọt
lố trường hợp triệt tiêu cực nhỏ hơn hai trường hợp kia.
b/ Thiết kế dùng giản đồ Bode
Hàm truyền khâu sớm pha có dạng(6.7)
sT
asT
KsG CC
1
1
)(
31. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
189
Ta thực hiện theo các bước sau
Hình 6.40 Đáp ứng nấc Ví dụ 6.13
- Bước 1: Xác định chỉ tiêu thiết kế hằng số sai số, dự trữ pha PM*, dự trữ suất,
- Bước 2: Tính KC để đạt chỉ tiêu về hằng số sai số,
- Bước 3: Vẽ biểu đồ Bode của hàm truyền G1=KCG, tính tần số cắt biên C ở đó
|G1(j C )|=0 và dự trữ pha PM= G1(j C ) +180o
, tính độ lệch pha ϕm cần thêm vào để
đạt chỉ tiêu về dự trữ pha, cộng thêm 5o
đến 12o
vì khi đưa khâu sớm pha vào, tần số
cắt sẽ thay đổi, ϕm=PM*+(5o
.. 12o
)-PM
- Bước 4: Tính a dùng công thức
m
m
a
sin1
sin1
-Bước 5: Khâu sớm pha đưa vào làm tăng tần số cắt biên lên, tính tần số cắt mới
'
C dùng công thức |G1(j '
C )|=1/ a
- Bước 6: tính giá trị T từ điều kiện
a
T
C
'
1
- Bước 7: Kiểm tra điều kiện về dự trữ biên GM, nếu không đạt thì trở lại bước 3
Ví dụ6.14: Cho
)1(
10
)(
ss
sG , tính bộ điều khiển sớm pha sao cho Kv≥ 20/sec,
PM*≥ 50o
, GM* ≥ 10db
Cs
C
Cv K
s
K
GsGK 10|
1
10
limlim 0
, chọn CK =2
Vẽ biểu đồ Bode của G1(jω)=
)1(
20
jj
, biểu đồ Bode biên gồm hai đoạn độ
dốc -20db/dec đi qua điểm (0.1rad/s, 46.0206db) và (1 rad/s, 26.0206db), đoạn thứ hai
độ dốc -40db/dec đi qua điểm (1rad/s, 26.0206db) và (10 rad/s, -13.9794db), biểu đồ
Bode pha đi từ -90o
dến -180o
, tần số cắt biên là C ,
32. CHƢƠNG 6
190
Giải phương trình 20= C 2
1 C ta tính được C =4.4165rad/s, PM=180o
-90o
-
atan( C )=90o
-77.2420o
=12.7580o
Vậy góc pha phải bù là ϕm=50o
-12.7580o
+10o
=47.242o
Hình 6.41 Biểu đồ Bode Ví dụ 6.14
Tính
47.242)(sind1
47.242)(sind1
a = 6.5252
Tính tần số cắt mới 20= C' 2
'1 C / 5252.6 hay 1.2610'' 24
CC
=0, giải phương
trình C' =7.1059 rad/s
Tính
a
T
C
'
1
= 0.0551 sec
Hàm truyền bộ hiệu chỉnh
s
s
sGC
0551.01
0.35951
2)(
Biểu đồ Bode của G1, G2/2 và GCG được trình bày ở Hình 6.42PM= 55.2380o
,
C = 7.1169 rad/s.
6.3.2 Thiết kế hiệu chỉnh trễ pha
Hiệu chỉnh trễ pha dùng để giảm sai số xác lập với hàm dốc mà không ảnh hưởng
đến đáp ứng quá độ nhờ đặc tính độ lợi cao ở tần số thấp còn đặc tính trễ pha của
khâu hiệu chỉnh không sử dụng, ta đặt cực và zero khâu trễ pha gần nhau và gần gốc,
như vậy cực hệ kín sẽ không thay đổi nhiều so với khi không có khâu trễ pha, điều
kiện áp dụng là đặc tính quá độ hệ kín không có khâu trễ pha đã thỏa mãn yêu cầu và
ta chỉ thêm khâu trễ pha để giảm sai số xác lập. Nếu hệ kín chưa bổ chính có đáp ứng
quá độ chưa tốt có thể thêm điều khiển tỷ lệ để chỉnh cực chủ yếu. Khâu trễ pha giảm
được sai số xác lập là nhờ có độ lợi cao ở tần số thấp. Tuy nhiên phương pháp bổ
33. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
191
chính này sẽ làm cho hàm truyền hệ kín có thêm một cực và zero rất gần gốc, làm cho
đáp ứng nấc sẽ có một đuôi dài, kéo dài thời gian xác lập và tăng vọt lố.
clc
close all
hold on
kvd=20;
pmd=50;
b0=10;a0=1
s=tf(‘s’);
g=b0/(s*(s+a0));
kc=kvd/10
g1=kc*g;
bode(g1)
[gm,pm,wcp,wcg]=margin(g1)
phim=pmd +10-pm;
A=(1+sind(phim))/(1-sind(phim))
p=[1 a0^2 -a*b0^2]
var=roots(p)
wcn=sqrt(var(2))
T=1/wcn/sqrt(a)
gc=(1+a*T*s)/(1+T*s);
[gm,pm,wcp,wcg]=margin(g1*gc)
bode(gc)
bode(g1*gc)
grid on
gk=feedback(g1*gc,1)
figure
step(gk)
Hình 6.42Chƣơng trình, biểu đồ Bode và đáp ứng nấcVí dụ 6.14
a/ Thiết kế dùng quĩ tích nghiệm
Hàm truyền khâu hiệu chỉnh có dạng (6.9)
c
c
CCC
ps
zs
K
Ts
Ts
KG
/1
/1
, β<1, CK
=1
Các bước thiết kế như sau:
- Bước 1: xác định chỉ tiêu hằng số sai số vận tốc *
VK ,
- Bước 2: Vẽ quỹ tích nghiệm của G(s), xác định cặp cực chủ yếu của hệ kín
chưa bổ chính, nếu có yêu cầu phải điều chỉnh thì ta thêm vào khâu tỷ lệ KP,
tính KP để đặt cực chủ yếu ở vị trí này, thay hàm truyền G(s) bằng KPG(s) và
gọi là G(s) trong bước sau
- Bước 3: Tính 0|)(lim sV ssGK =của hệ thống kín chưa hiệu chỉnh,
- Bước 4: 0|)(lim' sCV sGsGK CK β VK , Chọn β= VK / *
VK , CK =1
- Bước 5: Chọn zero của khâu trễ pha gần gốc 0 và ở bên phải cực chủ yếu, để
34. CHƢƠNG 6
192
giảm độ lệch pha gây ra bởi khâu hiệu chỉnh, nghĩa là zcrất nhỏ, như vậy cực chủ yếu
của hệ kín sẽ thay đổi rất ít
- Bước 6: Tính cực pc=1/T=βzc.
Ví dụ 6.15: Đối tượng có hàm truyền
)20(
1
)(
ss
sG , thiết kế bộ điều khiển trễ
pha để hệ kín có hệ số đệm 0.707 và sai số với hàm dốc đơn vị là 0.05
Đầu tiên ta xét hệ kín chưa bổ chính, cực nằm trên đường thẳng đứng qua điểm
x= -10, phương trình đặc tính có hai nghiệm -19.9499 và -0.0501,ta thêm vào khâu tỷ
lệ KP, lúc này hệ số đệm là
2
2
/10 P K , 200/100 2
P K ,
Đặt
)20(
200
)(
ss
sG . hai cựchệ kín là -10±j10
VK =10, sai số xác lập mong muốn với hàm dốc là 5% tương ứng *
VK =20, vậy ta
chọn β=0.5, chọn zc<<1, zc=0.05, pc=0.05*0.5=0.025
Hàm truyền vòng thuận
)20(
1
*200*
025.0
05.0
sss
s
Hệ kín có ba cực -9.9874 ± 9.9875j và -0.05, hai cực liên hiệp giống cực của hệ
chưa bổ chính, đáp ứng nấc ở Hình 6.43.
Chú ý cái đuôi kéo dài của đáp ứng nấc, ở thời điểm 50s đáp ứng nấc của hệ đã
bổ chính là 1.002 (Hình 6.44), nghĩa là sai số xác lập vẫn chưa về 0, đáp ứng với hàm
dốc cũng có thời gian xác lập lớn , điều này làm giảm hiệu quả của bổ chính trễ pha.
clc
close all
s=tf('s');
t=[0:0.01:1];
g=200/(s+20)/s;
gk=feedback(g,1);
step(gk,t,'bl')
hold on
g1=g*(s+0.05)/(s+0.025);
gk1=feedback(g1,1);
pole(gk1)
step(gk1)
t=[0:0.01:50];
y1=step(gk/s,t);
y2=step(gk1/s,t,'r');
y3=step(1/s,t);
figure
plot(t,y1,t,y2,t,y3)
figure
plot(t,y3-y1,t,y3-y2)
Hình 6.43 Chƣơng trình và đáp ứng nấc Ví dụ 6.15
35. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
193
Hình 6.44Sai số đáp ứng nấc và đáp ứng nấc Ví dụ 6.15
b/ Thiết kế dùng biểu đồ Bode
Hàm truyền khâu trễ pha là
1/ 1
, 1
1/ 1
C
C C
Ks T s T
G K
s T sT
- Bước 1:Ta đặt K=KC/β, tính K để KV= *
0
lim ( ) V
s
KsG s K
,
- Bước 2: Vẽ biều dồ Bode của KG(jω), tính dự trữ pha ở tần số cắt biên, nếu
không đạt yêu cầu PM* tìm tần số cắt mới '
C ở đó dự trữ pha là PM* cộng thêm dự trữ
5o
..12o
để bù trễ pha do khâu bổ chính,
- Bước 3: tính độ suy giảm độ lợi để biểu đồ Bode GCG có tần số cắt mới này, đó
chính là 20logβ= -20log|KG| '
C , hay β= 1/|KG| '
C ,
- Bước 4: chọn zero và cực của khâu trễ pha nhỏ hơn một decade so với '
C , cụ
thể là 1/βT= '
C /10 và 1/T=β '
C /10.
Ví dụ 6.16: Cho
1
( )
( 1)(0.5 1)
G s
s s s
thiết kế hiệu chỉnh trễ pha để *
VK =5/sec,
PM*>40o
, GM*>10db.
KV= *
0
lim ( ) 5V
s
KsG s K K
, vậy chọn K=5
Vẽ biểu dồ Bode của G1(s)=5G(s), ta nhận thấy hệ kín không ổn định
GM = -4.4370db, PM = -12.9919o
, ωcg =1.4142 rad/s, ωcp =1.8020 rad/s
Dự trữ pha mong muốn là 40o
+ dự trữ 12o
tương ứng pha -180o
+52o
= -128o
,
tương ứng tần số cắt trên biểu đồ Bode pha là '
C =0.5 rad/s
2 4
0.5
5 5
8.6772
( 1)(0.5 1) 0.5* 1 0.5 1 0.5s s s
Vậy β=1/8.6772=0.1152, ta chọn giá trị β=0.12 suy ra KC=K β=0.6
36. CHƢƠNG 6
194
Chọn zero của khâu trễ pha nhỏ hơn tần số cắt 10 lần, là 0.05 rad/s, suy ra
1/T=0.12*0.05=0.006 rad/s,
Hình 6.45 Biểu đồ Bode Ví dụ 6.16
Hàm truyền khâu bổ chính
0.05
0.6
0.006
C
s
G
s
Kiểm tra lại ta thấy PM = 43.2o
, GM = 13.4db, Wcg =1.37 rad/s , Wcp =
0.52rad/s, vậy kết quả thiết kế đạt yêu cầu.
Hình 6.46 Biểu đồ Bode Ví dụ 6.16
6.3.3 Thiết kế hiệu chỉnh sớm-trễ pha
Hiệu chỉnh sớm pha giúp giảm thời gian quá độ, hiệu chỉnh trễ pha giảm sai số
xác lập, muốn cải thiện cùng lúc hai chỉ tiêu ta dùng hiệu chỉnh sớm- trễ pha
a/ Thiết kế dùng quỹ tích nghiệm
37. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
195
clc
close all
s=tf('s');
g=1/(s*(s+1)*(0.5*s+1));
g1=5*g;
bode(g1,{0.001,5})
[Gm,Pm,Wcg,Wcp] = margin(g1)
GM=20*log10(Gm)
gc=0.6*(s+0.05)/(s+0.006);
hold on
bode(gc/5)
bode(g*gc)
grid on
[Gm,Pm,Wcg,Wcp] = margin(g*gc)
GM=20*log10(Gm)
gk=feedback(gc*g,1)
figure
gku=feedback(g,1);
step(gku)
hold on
step(gk)
Hình 6.47 Chƣơng trình và đáp ứng nấc Ví dụ 6.16
Hàm truyền có dạng:
'1 2 1 2
1 2 1 2
1/ 1/ 1 1
( )
1/ 1/ 1 1
C C C
s T s T T s T s
G s K K
s T s T T s T s
, (6. 13)
α>1, β<1,
1 1 2 2
1 1 1 1
T T T T
Hình (6.48) là biểu dồ Bode khâu sớm trễ pha
1 5 1 20
( )
1 1 50
C
s s
G s
s s
Hình 6.48Biểu đồ Bode bộ hiệu chỉnh sớm-trễ pha
38. CHƢƠNG 6
196
Hình 6.49 Bộ hiệu chỉnh sớm-trễ pha
Hình (6.49) là sơ đồ bộ hiệu chỉnh sớm- trễ pha có hàm truyền
'4 6 1 1 3 2 2 1 2
3 5 1 1 2 2 4 1 2
( ) 1 ( ) 1 1 1
( ) 1 1 ( ) 1 1
O
C
i
V s R R sC R R sC R T s T s
K
V s R R sC R sC R R T s sT
(6.14)
1 3 2
1 1 1 2 2 4 2
1 2 4
'2 4 6 1 3 4 6
1 3 5 2 4 3 5
, ( ) , ,
,C C
R R R
T R C T R R C
R R R
R R R R R R R
K K
R R R R R R R
Ta thiết kế hiệu chỉnh sớm pha trước, sau đó đến trễ pha
Tính hiệu chỉnh sớm pha, các bước giống mục 6.3.1
- Bước 1: từ độ vọt lố và thời gian xác lập, chọn cực chủ yếu,
- Bước 2: tính góc ϕ phải bù, tính α, T1
- Bước 3: chọn cực và zero khâu sớm pha,
- Tính KC, không có khâu trễ pha,
Tính hiệu chỉnh trễ pha, các bước giống mục6.3.2
- Bước 4: Tính KV= *
0 0
lim lim C
C V
s s
K
sG G sG K
, suy ra β,
- Bước 5: Chọn zero và cực của khâu trễ pha gần gốc sao cho
2 2
2 2
1/ 1/
1, 5 0
1/ 1/
o os T s T
s T s T
Ví dụ 6.17: Cho đối tượng hàm truyền
4
( )
( 0.5)
G s
s s
, thiết kế hiệu chỉnh sớm-
trễ pha với ζ=0.5, ωn=5rad/s, và KV=8/sec.
Cực chủ yếu là s1,2=-2.5±j4.33, ở cực chủ yếu góc pha hàm truyền là
1
4
235
( 0.5)
o
s
s s
vậy khâu sớm pha phải đóng góp 55o
.
Ta đặt zero khâu sớm pha ở -0.5 để triệt tiêu cực của G(s), sau khi tính toán như
39. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
197
ở mục 6.3.1, cực khâu sớm pha là -5.02, hàm truyền khâu sớm pha
0.5
5.02
C
s
K
s
,
T1=0.2, α=10.04, tính KC để quĩ tích nghiệm qua cực chủ yếu
1
0.5 4
1
5.02 ( 0.5
C
s
s
K
s s s
Suy ra
1
( 5.02)
6.26
4
C
s
s s
K
Tiếp theo ta tính KV=
0
1 4 1 4
lim 6.26 80
( 0.5) 10.04 0.5
C
s
K s
s s
, suy ra β=0.062,
cực và zero khâu trễ pha được chọn sao cho
1 1 1
2 2 2
2 2 2
0.062 0.1/ 061/ 1/
1, 5 0
1/ 1/ 1/
2o
s s s s s s
s T s T s T
s T s T s T
Có nhiều lời giải để chọn cực zero, chọn 1/βT2=0.2, suy ra 1/T2=0.01247, hàm
truyền khâu bổ chính là:
0.5 0.2 10(1 2 )(1 5 )
( ) 6.26
5.02 0.01247 (1 0.1992 )(1 80.19 )
C
s s s s
G s
s s s s
Hình 6.50Đáp ứng với hàm dốc dùng Simulink
b/ Thiết kế dùng biểu dồ Bode
Hàm truyền đối tượng là G(s), hàm truyền khâu sớm trễ pha là
' 1 2
1 2
1 1
( ) , 1, 1
1 1
C C
T s T s
G s K
T s T s
, để cho đơn giản ta chọn α=1/β, các bước thiết
kế dựa trên các mục trước.
Ví dụ 6.18:
1
( )
( 1)( 2)
G s
s s s
, KV=10/sec, PM=50o
, GM=10db
Đầu tiên chọn '
CK để thỏa mãn điều kiện của KV
KV=
'
0
lim 10,
2
C
C
s
K
sG G
vậy chọn '
CK =20 .
40. CHƢƠNG 6
198
Vẽ biểu đồ Bode của G1(s)= '
CK G(s)gồm ba đoạn độ dốc lần lượt -20,- -40 và -
60db/dec, tần số gẫy lần lượt 1 và 2rad/s
- Biểu đồ Bode pha cho thấy độ dự trữ pha là -32o
, hệ kín chưa bổ chính không
ổn định. Tần số cắt pha là 1,5 rad/s tương ứng biên độ là 13db, ta chọn tần số cắt biên
mới là 1,5 rad/s,khâu trễ pha phải cung cấp lệch pha dương ϕm=50o
+5o
=55o
, và giảm
biên -13db để kéo biểu đồ Bode biên độ về 0db và pha khoảng 50o
ở tần số 1,5 rad/s
- Biết ϕm ta tính
1 sin
10,
1 sin
m
m
biểu đồ Bode khâu sớm pha có độ dốc
20db/dec , cực và zero cách nhau một dec, ta vẽ đường 20db/dec qua điểm (1.5 rad/s, -
13db), cắt trục hoành tại 7rad/sec và đường ngang -20db tại 0.6rasd/s, hàm truyền
khâu sớm pha là
0.7 1 1.743
0.1
7 1 0.1743
s s
s s
- Tính tiếp, zero khâu trễ pha nhỏ hơn tần số cắt 10 lần, là 0.15rad/s, vậy cực
tương ứng 0.015rad/s, hàm truyền khâu trễ pha là
0.15 1 6.67
10
0.015 1 0.667
s s
s s
- Hàm truyền thuận 1
0.7 0.15 1
( ) ( ) 20
7 0.015 ( 1)( 2)
C
s s
G s G s
s s s s s
Hình 6.51 Biểu đồ Bode Ví dụ 6.18
Tính toán Matlab cho kết quả
GM =16.9322db, PM =55.207o
, wcp =1.095 rad/s, wcg = 3.9197rad/s
Đáp ứng nấc có một đuôi kéo dài, do đó thời gian xác lập lớn
41. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
199
Hình 6.52 Biểu đồ Bode và đáp ứng Ví dụ 6.17
6.4THIẾT KẾ DÙNG MATLAB
Hàm sisotool của Matlab giúp thiết kế bộ điều khiển dùng biểu đồ Bode hay quỹ
tích nghiệm dễ dàng.
Ví dụ 6.19: thiết kế bộ điều khiển sớm pha kết hợp tích phân điều khiển vị trí
động cơ DC loại trừ ảnh hưởng nhiễu tải (xem mục 5.3), đạt chỉ tiêu thời gian xác lập
<0.040 sec, vọt lố < 16%
Hàm truyền động cơ 2
( )
( )
( ) (( )( ) )
s K
G s
V s s Js b Ls R K
Từ yêu cầu về POT=0.16 ta tính được gần đúng hệ số đệm và băng thông, áp
dụng công thức hệ bậc hai
zeta =-log(.16)/sqrt( pi^2+(log(.16))^2 );
PM = 100*zeta
BW = (4/(0.04*zeta))*sqrt((1-2*zeta^2) + sqrt(4*zeta^4-4*zeta^2+2))
PM =
50.3868
BW =
251.5743
Biểu dồ Bode vòng hở phải có dự trữ pha tối thiểu 50o
và băng thông tối thiểu
250 rad/s
Cấu hình hệ thống có dạng
42. CHƢƠNG 6
200
Ta viết m file khai báo hàm truyền đối tượng và gọi hàm sisotool
J = 3.2284E-6;
b = 3.5077E-6;
K = 0.0274;
R = 4;
L = 2.75E-6;
s = tf('s');
P_motor = K/(s*((J*s+b)*(L*s+R)+K^2));
sisotool('bode',P_motor)
Hai cửa sổ mở ra, một là SISO Design for SISO Design Task(Hình 6.48)với
biểu đồ Bode hệ chưa bổ chính, (sở dĩ xuất hiện biểu dồ này vì ta đã gọi trong hàm
sisotool, nếu bỏ chữ bode thì xuất hiện cả quĩ tích nghiệm). Trên biểu đồ ta đọc được
dữ trữ biênpha và tần số cắt, cửa sồ thứ hai là Control and Estimation Tools
Manager dùng để khai báo cấu trúc hệ thống và bộ điều khiển. Biểu đồ Bode Hình
6.53 cho thấy hệ kín ổn định nhưng thời gian xác lập chưa đạt yêu cầu và chưa loại trừ
được nhiễu tải.
Bấm chuột phải vào Compensator Edit để thêm khâu tích phân triệt tiêu nhiễu
loạn (Hình 6.54), biểu đồ Bode thay đổi tương ứng hàm truyền G(s)/s(Hình 6.55). Hệ
kín không ổn định. Ta thêm zero thật vào, chú ý dấu chữ thập x ở tần số -60 rad/s
tương ứng cực hệ hở, vậy zero thêm vào ở tần số này để triệt tiêu cực.
Bấm chuột phải vào Dynamics - Add Pole/Zero - Real Zero – Location thêm vào
số -60 (Hình 6.56). Lúc này khâu bổ chính là PI hàm truyền (1+s/60)/s
Hình 6.53Biểu đồ Bode G(s)
43. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
201
Hình 6.54 Thao tác thêm khâu bổ chính tích phân
Hình 6.55Biểu đồ Bode sau khi thêm khâu tích phân
44. CHƢƠNG 6
202
Hình 6.56Thêm zero
PM ở tần số 250 rad/s khoảng -0.15o
.Ta tiếp tục thêm khâu sớm pha ở tần số 250
rad/s , thêm giá trị pha và tần số vào (Hình 6.57)
Lúc này PM ở 250 rad/s khoảng 50o
nhưng độ lợi khoảng -55db, vậy ta tăng độ
lợi DC lên 600 tương ứng 55db để tần số cắt biên là 250 rad/s và PM là 50o.
. Ta gõ số
600 vào ô hệ số chỗ Compensator (Hình 6.58)
Hình 6.57Thêm sớm pha
45. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
203
Hình 6.58 Thêm khâu sớm pha
Hình 6.59Thay đổi độ lợi
Biểu đồ Bode (Hình 6.60) cho thấy tần số cắt biên là 236rad/s và PM=49.8o
.
Bây giờ vẽ đáp ứng từ r đến y(Hình 6.61), ta nhận thấy POT khoảng 30% quá lớn
, còn thời gian xác lập khoảng 0.03s tốt hơn yêu cầu.
Hàm truyền khâu bổ chính là:
600(1 0.017 )(1 0.011 )
( )
(1 0.0015 )
s s
C s
s s
46. CHƢƠNG 6
204
Hình 6.60 Biều đồ Bode
Hình 6.61Vẽ đáp ứng
Nếu muốn chỉnh thêm ta có thể tăng Max DeltaPhase lên 70o
và giảm Gain còn
400 (Hình 6.62). Hoặc có thể dùng phương pháp Automated Tuning.
47. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
205
Hình 6.62 Đáp ứng sau cùng
6.5 THIẾT KẾ BỘ ĐIỀU KHIỂN NHIỀU VÒNG HỒI TIẾP
Hình 6.63 có hai vòng hồi tiếp, vòng trong có bộ điều khiển GC(s) trên đường hồi
tiếp, vòng ngoài có bộ điều khiển nối tiếp G1(s) , thông thường vòng trong là hồi tiếp
đạo hàm của tín hiệu ra, gọi tắt là hồi tiếp vận tốc.
Hàm truyền vòng thuận là 2
1
21
F
C
G
G G
G G
, hàm truyền kín là
1
F
K
F
G
G
HG
Hình 6.63 Bộ điều khiển hai vòng hồi tiếp
Ví dụ 6.20
2
2 1, ,
( 2 )
n
C C P
n
G G K s G K
s s
. ta tính được
2
2
2 2
( 2 )
,
( 2 )
1
( 2 )
n
P
n P n
F
n n n C
C
n
K
s s K
G
s s K
K s
s s
2
2 2 2
(2 )
P n
K
n n C P n
K
G
s K s K
Chỉnh hai thông số KP, KC để đạt chất lượng yêu cầu
Đối với những đối tượng phức tạp mà hàm truyền gồm nhiều tầng, có thể thiết kế
bộ điều khiển cascade gồm nhiều vòng, ngõ ra bộ điều khiển vòng ngoài là tín hiệu
đặt cho bộ điều khiển vòng trong, cách điều khiển cascade này thường dùng cho các
48. CHƢƠNG 6
206
quá trình như nhiệt, mức, vị trí, dùng để giảm bớt nhiễu loạn ở tầng trước truyền sang
tầng sau.
Hình 6.64 Điều khiển cascade
Vòng trong được thiết kế với đáp ứng nhanh hơn vòng ngoài, các bộ điều khiển
thường là PI, thứ tự là thiết kế vòng trong trước rồi đến vòng ngoài.
Ví dụ 6.21: 2 1 3
3 10
, ,
2 ( 1)
P P
s s
C1, C2 là các bộ điều khiển PI, ta thiết kế vòng
trong có băng thông là 2 rad/s , vòng ngoài chậm hơn có băng thông 0.2 rad/s. Ta sẽ
thiết kế bộ điều khiển một vòng (Hình 6.65) và hai vòng (Hình 6.64) để so sánh khả
năng loại bỏ nhiễu loạn v, Thiết kế dùng hàm pidtune của Matlab
Hình 6.65 Điều khiển một vòng
Chạy chương trình cho kết quả điều khiển cascade chống nhiễu loạn tốt hơn điều
khiển một vòng (Hình 6.66).
clc
close all
P2 = zpk([],-2,3);
P1 = zpk([],[-1 -1 -1],10);
% The plant model is P = P1*P2
P = P1*P2;
% Use a PID or PIDSTD object to
define %the desired controller
structure
C = pidstd(1,1);
% Tune PI controller for target
% bandwidth is 0.2 rad/s
% cascade system for reference
%tracking
sys2 = feedback(clsys*P1*C1,1);
sys2.Name = 'Cascade';
% plot step response
figure;
step(sys1,'r',sys2,'b--')
legend('show','location','southeast
')
title('Reference Tracking')
% single loop system for rejecting
V
49. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
207
C = pidtune(P,C,0.2)
C2 = pidtune(P2,pidstd(1,1),2)
% Inner loop system when the
control %loop is closed first
clsys = feedback(P2*C2,1);
% Plant seen by the outer loop
% controller C1 is clsys*P1
C1 =
pidtune(clsys*P1,pidstd(1,1),0.
2)
% single loop system for
reference
% tracking
sys1 = feedback(P*C,1);
sys1.Name = 'Single Loop';
sysv1 = feedback(P1,P2*C);
sysv1.Name = 'Single Loop';
% cascade system for rejecting d2
sysv2 = P1/(1+P2*C2+P2*P1*C1*C2);
sysv2.Name = 'Cascade';
% plot step response
figure;
step(sysv1,'r',sysv2,'b--')
legend('show')
title('Disturbance Rejection')
C =
1 1
Kp * (1 + ---- * ---)
Ti s
with Kp = 0.0119, Ti = 0.849
Continuous-time PI controller in standard form
C2 =
1 1
Kp * (1 + ---- * ---)
Ti s
with Kp = 0.244, Ti = 0.134
Continuous-time PI controller in standard form
C1 =
1 1
Kp * (1 + ---- * ---)
Ti s
with Kp = 0.015, Ti = 0.716
Continuous-time PI controller in standard form
Hình 6.66 Đáp ứng nấc và chống nhiểu Ví dụ 6.21
50. CHƢƠNG 6
208
Phần kế tiếp trình bày bộ điều khiển dùng phương trình trạng thái và đặt cực,
phương pháp này sử dụng tính toán trên ma trận và vector, thích hợp với công cụ điều
khiển bằng vi xử lý.
6.6 THIẾT KẾ BỘ ĐIỀU KHIỂN DÙNG PHƢƠNG PHÁP ĐẶT CỰC
6.6.1 Tính ma trận hồi tiếp
Trong phần này chúng ta thiết kế bộ điều khiển dùng phương trình trạng thái và
phương pháp đặt cực.
Cho đối tượng có hàm truyền 1
1
n-1
n-1 0
n n-
n- 0
b s +b s +..+bY(s)
=
U(s) s +a s +..+a
n
n
Đối tượng SISO được biểu diển bởi phương trình trạng thái dạng chính tắc điều
khiển được
u
y du
x Ax b
cx
Các ma trận có dạng (xem mục 2.3)
0 1 2 1
0 1 2 1
0 1 0 .. 0 0
0 0 1 .. 0 0
: : : .. : , ,:
0 0 0 .. 1 0
.. 1
.. ,0 n 1 n 2 n-1 n
a a a a
b a b b a b b a b b a b d b
n
n n n
A b
c (6.15)
x: vector trạng thái n x 1
y: tín hiệu ra;
u: tín hiệu điều khiển,
A: ma trận n x n,
b: vector n x 1,
c: vector 1 x n,
d: số vô hướng
Đặt tín hiệu diều khiển
u=-kx+r
đây là phương pháp điều khiển hồi tiếp trạng thái, k là vector 1 x n gọi là vector độ lợi
hồi tiếp trạng thái, r là tín hiệu đặt hằng số. Chú ý là khi tín hiệu đặt bằng 0, các biến
trạng thái sẽ tiến về 0 sau thời gian quá độ, hệ thống gọi là hệ điều chỉnh, duy trì các
biến trạng thái ở 0.
Phương trình trạng thái hệ kín
( )
( )
r
y d dr
x A bk x b
c k x
Với d = 0, dùng biến đổi Laplace ta được đáp ứng thời gian
51. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
209
1
( ) ( ) ( (0) )
r
s s
s
b
X I A bk x (6.16)
( ) ( )(
0
( ) (0)t t- )
t r dτ
t
A bk A bk
x e x e b (6.17)
x(0) là giá trị ban đầu của vector trạng thái, t là biến thời gian. Các trị riêng của
ma trận A-bk là cực của hệ kín, nếu các cực này ở nửa mặt phẳng trái thì x(t) →xss, hệ
thống ổn định tiệm cận. Vậy ta chọn trước n cực của hệ kín ở nửa mặt phẳng trái, sau
đó tìm vector k, đây là nguyên tắc của phương pháp điều khiển đặt cực hồi tiếp trạng
thái. Việc tính toán đáp ứng bằng tay tương đối phức tạp, thông thường ta tính bằng m
file. Giá trị ngõ ra y khác với tín hiệu đặt rvì ta không so sánh y với r.
Ta tìm giá trị xác lập xsscủa các biến trạng thái khi r ≠ 0, thay biến trạng thái x1
bằng biến *
1 1
1
r
x x
k
, do r là hằng số nên *
1 1x x , phương trình trạng thái mới là
* *
1 2
* *
*
[ ... ] ,x x x
u,
u=-
T
nx
x Ax b
kx
Các biến trạng thái tiến về 0, *
1 1 1/x x r k →0, ,
suy ra:x1→r/k1, 0,x i 2..n i (6.18)
Hình 6.67 Điều khiển hồi tiếp trạng thái
Ta công nhận định lý sau:
Điều kiện cần và đủ để ma trận A-bk có trị riêng ở nửa mặt phẳng trái là ma trận
vuông MC=[ b AbA2
b .. An-1
b] có định thức bậc n khác 0. MCgọi là ma trận tính điều
khiển đƣợc(controllability matrix).
Ta tính det(MC) bằng tay hoặc dùng hàm rank(ctrb(A,B) Matlab để tìm hạng ma
trận điều khiển được, kết quả phải là n.
52. CHƢƠNG 6
210
Gọi pi,i=1..n là các cực mong muốn của hệ kín, đa thức đặc tính mong muốn là
(s-p1)(s-p2)…(s-pn), đa thức đặc tính hệ kín là det(sI-A+bk), vậy giá trị của vector k
được tính bằng cách cân bằng hai vế của phương trình
det(sI-A+bk)=(s-p1)(s-p2)…(s-pn)
Nếu A viết dưới dạng chính tắc điều khiển được thì tính k rất dễ dàng
Cách thứ hai dùng công thức Ackermann, phức tạp hơn
- Tính đa thức bậc n theo s:φ(s)=(s-p1)(s-p2)…(s-pn)
- Tính φ(A) với ma trận A thay cho biến s ở đa thức trên
- Tính k theo công thức
k=[0 0..0 1] M-1
φ(A) (6.19)
Không có qui định cụ thể về việc chọn cực, thông thường dựa theo các nguyên
tắc:
- Cực gần trục ảo sẽ cho đáp ứng chậm, cực xa trục ảo cho đáp ứng nhanh hơn
nhưng tín hiệu điều khiển sẽ lớn, có thể rơi vào vùng bão hòa,
- Cực phức –a ±jb=-ζωn±jωn
2
1 gần trục thực cho hệ số đệm nhỏ,
- Chọn hai cực phức chủ yếu và các cực thực ở xa bên trái cực chủ yếu,
- Mô phỏng với nhiều giá trị cực khác nhau và chọn lựa kết quả tốt nhất.
Ví dụ 6.22: Chođối tượng có hàm truyền 2
( ) 1
( )
Y s
U s s
tính luật điều khiển đặt cực ở
p=-4±j4 để ổn định trạng thái ở 0. Điều kiện đầu là y=1, 0y .
Phương trình trạng thái là
1 1
2 2
1
1
2
0 1 0
0 0 1
1 0
x x
u
x x
x
y x
x
Chọn luật điều khiển 1 1 2 2 u k x k x +r,phương trình trạng thái hệ kín là
1 2
1 2 1 2
0 1 0 0
( )
0 0 1 1
0 0 0 10 1 0 0
0 0 1 1
x A bk x b x
x x
r k k r
r r
k k k k
Phương trình đặc tính hệ kín là 2
2 1 0 s k s k , phương trình đặc tính mong
muốn 2
( 4 4)( 4 4) 8 32 s j s j s s , suy ra k2=8, k1=32.
1
1
2
8 1
1 32
32 8 8 32
s
s s
sI A bk
s s s
Biến đổi Laplace của đáp ứng trạng thái
2 2
8 1 8 1
032 32
( ) (0) ( )
18 32 8 32
X x
s s
s s
s R s
s s s s
53. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
211
Biến đổi Laplace của đáp ứng ngõ ra
1 2
2 2
( 8) (0) (0) ( )
( )
8 32 8 32
s x x R s
Y s
s s s s
Ta có thể tiếp tục dùng biếnđổi Laplace ngượcđể tính đáp ứng theo thời gian,tuy
nhiên tốt nhất là dùng Matlab. Ở đây ta sẽ dùng simulink
Hình 6.68 Sơ đồ simulink Ví dụ 6.22
Hình 6.69 Đáp ứng nấc Ví dụ 6.22
Ví dụ 6.23: Cho đối tượng có hàm truyền
3 2
( ) 1
( ) 6 5 1
Y s
U s s s s
Ta lập phương trình trạng thái dạng chính tắc điều khiển
0 1 0 0
0 0 1 , 0 , 1 0 0 , 0
1 5 6 1
d
A b c
Chọn cực hệ kín là -2±j4, -10 , đa thức đặc tính:
φ(s)=s3
+14s2
+60s+200
54. CHƢƠNG 6
212
2
0 0 1
0 1 6
1 6 31
M b Ab A b ,
det(M)=-1 vậy hệ thống điều khiển được
*Dùng phƣơng pháp Ackermann tính k
3 2
199 55 8
8 159 7
7 4
14 6
3
200
117
0
A A A A
1
0 0 1 199 55 8
0 1 6 8 1590 0 1 · 197 [ 9 55 8]
1 6 31 7 43 117
k
* Dùng phƣơng pháp cân bằng đa thức đặc tính tính k
k=[k1k2k3]
|sI-A+bk|= 1 2 3
0 0 0 1 0 0
| 0 0 0 0 1 0
0 0 1 5 6 1
|
s
s k k k
s
sI A bk
|sI-A+bk|
1 2 3
1 0
0 1
1 5 6
s
s
k k s k
= s3
+(6+k3)s2
+(5+k2)s+1+k1
s3
+14s2
+60s+200= s3
+(6+k3)s2
+(5+k2)s+1+k1
Suy ra k=[199 55 8]
* Dùng Matlab
Có hai hàm dùng để tính k là hàm acker(A,B,P) và place(A,B,P), hàm place yêu
cầu không có cực bội , P là vector hàng các cực mong muốn.
clc
close all
A=[0 1 0;0 0 1;-1 -5 -6];
B=[0;0;1];
C=[1 0 0];
D=0
p=[-2+j*4 -2-j*4 -10];
Co =ctrb(A,B) %Compute
Controllability Matrix
r=rank(Co)% Compute Rank
K=acker(A,B,p)
sys=ss(A-B*K,B,C-D*K,D);
[y,t,X] = initial(sys,[1;0;-1]);
plot(t,X),grid
title('Response to Initial
Condition')
figure
plot(t,y),grid
title('Output Response to Initial
Condition')
t=0:0.01:5;
u=100*ones(size(t));
[y,t,X] = lsim(sys,u,t,[1;0;-1]);
figure
plot(t,X),grid
title('Response to Initial
Condition and Step Input')
figure
plot(t,y),grid
title('Output Response to Initial
Condition and Step Input')
figure
plot(t,-K*X'+u),grid
title('Control Plot')
55. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
213
r =
3
K =
199 55 8
Hình 6.70Đáp ứng nấc Ví dụ 6.23
6.6.2 Điều khiển tín hiệu ra theo tín hiệu vào
Khi có tín hiệu vào r hằng số, và t →∞, x(t)→ xss ≠0, tín hiệu điều khiển
u(t)→uss, tín hiệu ra y(t)→yss=cxss+duss ≠r.
Để bảo đảm yss= r, ta dùng khâu tỷ lệ thay ngõ vào r bởi Nr, khâu tỷ lệ N gọi là
khâu feedforward.
Ta suy ra các biểu thức sau:
( )x = 0 = (A-bk)xss+bNr
y(∞) =r =(c-dk) xss+dNr
Từ đó suy ra
1 1
( )( )N d d
c k A bk b (6.20)
Hàm truyền hệ kín là
1( )
( )
( )
Y s
s N
R s
c I A bk b (6.21)
Ví dụ 6.24: Trở lại ví dụ 6.23 ta muốn tín hiệu ra y có giá trị xác lập là 1, ta thêm
vào hệ số Nở ngõ vào, viết chương trình Matlab tính N và vẽ đáp ứng
56. CHƢƠNG 6
214
clc
close all
A=[0 1 0;0 0 1;-1 -5 -6];
B=[0;0;1];
C=[1 0 0];
D=0
K=[199 55 8];
ND=D-(C-D*K)*((A-B*K)^-1)*B
sys=ss(A-B*K,B/ND,C-D*K,D);
htk=tf(sys)
t=0:0.01:5
u=ones(size(t));
[y,t,X] = lsim(sys,u,t,[2;0;-1]);
figure
plot(t,X),grid
title('Response to Initial
Condition and Step Input')
figure
plot(t,y),grid
title('Output Response to Initial
Condition and Step Input')
Hình 6.71Đáp ứng nấc Ví dụ 6.24
Kết quả cho thấy tín hiệu ra y tiến đến giá trị đặt là 1. Chú ý là kết quả điều khiển
có vẻ tốt nhưng nếu tín hiệu điều khiển lớn, có thể bị rơi vào vùng bão hòa và đáp ứng
sẽ khác đi, có thể là thời gian xác lập tăng lên,điều này có thể kiểm tra bằng simulink
Kết quả simulink (Hình 6.72) cho thấy tín hiệu u có biên độ từ 200 đến -40 quá
lớn, thời gian xác lập 3sec, khi giới hạn u ở mức ±5 thời gian xác lập tăng lên là
4.5sec.
57. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
215
Hình 6.72 Mô phỏng simulink Ví dụ 6.24
6.6.3 Điều khiển hồi tiếp trạng thái và ngõ ra
Nếu chỉ hồi tiếp trạng thái và dùng khâu tỷ lệ N ở ngõ vào thì không chắc là y →r
do sai số về mô hình, vậy cần phải hồi tiếp ngõ ra y, rõ ràng là sai số xác lập ngõ ra tuỳ
thuộc vào loại hàm truyền.
a/ Trƣờng hợp hàm truyền đối tƣợng loại 1
Xét đối tượng có hàm truyền
n 1 n-2
n-1 n-2 0
n-1 n-2
1 1
( )
( ) ( )
n-
b s +b s +..+bY s
=
U s s s +a s +..+a
58. CHƢƠNG 6
216
Khi hàm truyền đối tượng có khâu tích phân (Hình 6.73), ta đặt biến trạng thái
như sau
1 1 2 1 2 3 2, ,.. x =y, x x u x x u
1
2
1
1 2 1
0 1 0 .. 0
0 0 1 .. 0
: : : .. : , : ,
0 0 0 .. 1
0 ..
1 0 0 .. 0 , 0
a a a
d
n
n n
A b
c
β1=bn-1, β2=bn-2-an-1β1, β3=bn-3-an-1β2-an-2β1,.., (6.22)
βn=b0-an-1βn-1-an-2βn-2-..a1β1
Nếu bi=0, i>0 thì βn=b0, βi=0, i<n
Hình 6.73Hồi tiếp ngõ ra và biến trạng thái
Các phương trình liên quan là
,
[ ],1 2 n
1
u,
y
k k ..k
u k r
x Ax b
cx
k
kx
Phương trình hệ kín
1( ) + k r,
y=
x A bk x b
cx
Biến đổi Laplace
sX(s)=(A-bk)X(s)+bk1R(s)
59. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
217
1
1( ) ( ) ( )s s k R s
X I A bk b
Hàm truyền hệ kín
1
1
( )
( )
( )
c I A bk b
Y s
s k
R s
(6.23)
Nếu r là hằng số biên độ r, giá trị xác lập của y(t) là yxl= 1
1( ) k
c A bk b r
Có thể chứng minh là yxl= 1
1 0
k r
k a
, suy ra nếu đối tượng là loại 1, a0=0 và yss=r sai
số xác lập là 0, nếu đối tượng loại 0, sai số xác lập là 0
1 0
ra
k a
Ví dụ 6.25: Cho đối tượng có hàm truyền
3 2
( ) 2 1 2 1
( ) ( 1)( 2) 3 2
Y s
U s s s s s s s
s s
,
cực mong muốn là -2±j2 3 , -10. Thiết kế điều khiển tín hiệu ra theo tín hiệu đặt là
hàm nấc đơn vị sao cho sai số xác lập là 0
n=3, a3=1,a2=3, a1=2, a0=0, b2=0, b1=2, b0=1
β1=0, β2=bn-2-an-1β1=b1-a2β1=2,
β3=bn-3-an-1β2-an-2β1=b0-a2β2-a1β1=1-6=-5
Tín hiệu điều khiển là u=-k2x2-k3x3+k1(r-y)=-(k1x1+k2x2+k3x3)+k1r=-kx+ k1r
Vector k tính bằng Matlab được kết quả k =[160 458 181]
Kết quả mô phỏng (Hình 6.74) cho thấy tín hiệu ra xác lập bằng tín hiệu đặt. Nếu
đối tượng là loại 0 sẽ có sai số xác lập (Ví dụ 6.26).
clc
close all
A=[0 1 0;0 0 1;0 -2 -3];
B=[0;2;-5];
C=[1 0 0];
D=0
P=[-2+j*2*sqrt(3) -2-j*2*sqrt(3)
-10];
K=acker(A,B,P)
sys=ss(A-B*K,B*K(1),C-D*K,D);
t=0:0.01:5;
u=ones(size(t));
[y,t,X] = lsim(sys,u,t,[2;0;-1]);
figure
plot(t,X),grid
title('State Response to Initial
Condition and Step Input')
figure
plot(t,y),grid
title('Output Response to Initial
Condition and Step Input')
0 1 0 0
0 0 1 , 2 , 1 0 0
0 2 3 5
A b c
60. CHƢƠNG 6
218
Hình 6.74 Chƣơng trình và đáp ứng Ví dụ 6.25
b/ Trƣờng hợp hàm truyền đối tƣợng loại 0
Ví dụ 6.26: Xét đối tượng loại 0, 3 2
( ) 1 1
( ) ( 1)( 2) 6 5
Y s
U s s s s s s s+3
k=[ 97 35 3]
Sai số xác lập là 0
1 0
ra
k a
=0.03
Hình 6.74 Đáp ứng Ví dụ 6.26
Để cho đối tượng loại 0 có sai số xác lập 0 ta thêm vào hệ thống khâu tích phân,
bậc hệ thống tăng lên là n+1, biến mới thêm vào gọi là ξ (Hình 6.75)
61. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
219
Hình 6.75 Điều khiển đặt cực với tích phân
Phương trình trạng thái
,
u,
y
x Ax b
cx
,
I
r
u k
cx
kx
Kết hợp biến trạng thái x và ξ, phương trình trạng thái mới là
0 0 1
,
u r,
y
u k
0 0
I
x A x b
c
cx
kx
Phương trình trạng thái hệ kín
0 0 1
0 0
I
x A b x
k
c
cx
k r,
y
(6.24)
Ta tìm vector [k |kI] cho hệ thống bậc n+1 ở trên, từ đó suy ra k và kI
Ví dụ 6.27: Cho hệ thống
10
( )
( 1)( 5)
G s
s s
, thiết kế bộ điều khiển đặt cực và
tích phân sao cho sai số xác lập với hàm nấc là 0 và các cực bội ở p=-2
Phương trình trạng thái đối tượng
0 1 0
, , 10 0
5 6 1
A b c
Ta viết chương trình Matlab
clc
close all
K=acker(AA,BB,P)
sys=ss(AA-BB*K,[zeros(2,1);1],[C
62. CHƢƠNG 6
220
A=[0 1;-6 -5];
B=[0;1];
C=[1 0 ];
D=0;
P=[-2 -2 -2];
AA=[A zeros(2,1);-C 0];
BB=[B;0];
0],D)
ht=tf(sys)
t=0:0.01:5;
u=ones(size(t));
[y,t,X] = lsim(sys,u,t,[0;0;0]);
plot(t,y),grid
title('Output Response to Initial
Condition and Step Input')
Kết quả K =[6 1 -8], u=-[6 1]x-8
0
( )
t
r y d
Hồi tiếp trạng thái đòi hỏi phải đo được tất cả trạng thái, như vậy hệ thống bậc n
cần phải có n cảm biến, điều này có thể phức tạp và nhiều trạng thái không thuận tiện
để đo. Một phương án đơn giản là ước lượng các trạng thái không đo được bằng cách
dùng bộ quan sát trạng thái.
6.7 HỆ THỐNG QUAN SÁT-ĐIỀU KHIỂN TRẠNG THÁI
6.7.1 Quan Sát Trạng Thái Đầy Đủ
Bộ quan sát ước lượng trạng thái dựa trên kết quả đo tín hiệu ra và tín hiệu vào
để suy ra các biến trạng thái. Chú ý rằng phương pháp này chỉ chính xác khi phương
trình trạng thái hệ thống được biết chính xác. Cho hệ thống
x Ax b
cx
u
y
(6.25)
Ta đo y và u, từ đó suy ra giá trị ước lượng ˆx của x, do có sai số ước lượng nên
có sai lệch giữa y=cxvà ˆcx , ta có thể viết
ˆ ˆ ˆ( )
ˆ ˆ( )
x Ax b l y cx
x A lc x b l
u
u+ y
(6.26)
Đặt ˆ e x x gọi là sai số ước lượng, ta có
ˆ ˆ ˆ( )
( )
x x Ax Ax l cx cx
e A lc e
(6.27)
Phương trình đặc tính là | | 0 sI A lc
Nếu chọn ma trận A lc có nghiệm riêng (gọi là cực quan sát) bên nửa mặt phẳng
trái thì hệ thống ổn định tiệm cận,e →0, nghĩa là ˆx →x. Nếu chọn các nghiệm riêng ở
xa trục ảo thì sai số sẽ giảm nhanh. Tính chất của A lc trong ước lượng cũng tương
tự tính chất của A bk , lgọi là độ lợi quan sát.Bộ quan sát gọi là đầy đủ vì ước lượng
tất cả biến trạng thái. Cách tính ltương tự cách tính k.
Điều kiện để tìm đượclkhi cho trước A, c và các cực quan sát là hệ thống (A,c)
quan sát được nghĩa là ma trận tính quan sát đƣợc(observability matrix)
Mo= 2 1
,, ( ) ( )
T T T n T T n T T
c A c A c A c
63. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
221
có định thức bậc n khác 0.Dùng hàm rank(obsv(A,c)) để tìm hạng ma trận quan sát
được, kết quả phải là n. Tính toán l bằng tay hoặc dùng hàm l’=acker(A’,c’, P),
l’=place(A’,c’, P), dấu nháy là ký hiệu của phép chuyển vị, P là vector các cực của bộ
quan sát.
Ví dụ 6.28: xét đối tượng Ví dụ 6.22, thiết kế bộ quan sát với cực kép ở -10.
Phương trình trạng thái là:
1 1
2 2
1
1
2
0 1 0
0 0 1
1 0
x x
u
x x
x
y x
x
1 1
2 2
1
2
10 0 1 0
( ) 1 0
00 0 0 0
1
I A lc
l ls s
s
l ls s
s l
l s
Phương trình đặc tính 2 2 2
1 2 ( 10) 20 100 s sl l s s s
Suy ra l1=20, l2=100
Ví dụ 6.29: cho hàm truyền 2
( ) 10
( )
( ) ( 10 100)
Y s
G s
U s s s s
, biểu diễn dưới dạng
chính tắc điều khiển
0 1 0 0
0 0 1 , 0 , 10 0 0
0 100 10 1
A b c
Ta tính độ lợi l=[l1 l2 l3]T
để cực bộ quan sát là -20, mô phỏng sai số ước lượng
trạng thái với u=0, x(0)=[0.1 1 0]T
, ˆ(0) [0.6 0 0.5] T
x
*Tính bằng tay
1 1
2 2
3 3
0 0 10 1 0 10 1 0
0 0 10 0 1 10 1
0 0 10 100 10 10 100 10
I A lc
s l s+ l
s s l l s
s l l s
det( I A lcs )=(s+10l1)(s(s+10)+100)+10l2(s+10)+10l3
=s3
+s2
(10+10l1)+s(100+100l1+10l2)+(1000l1+100l2+10l3)
=(s+20)3
=s3
+60s2
+1200s+8000
Cân bằng 2 vế ta được l1=5, l2=60, l3=-300
*Chƣơng trình Matlab
Chương trình và đáp ứng cho ở Hình 6.76
64. CHƢƠNG 6
222
clc
close all
A=[0 1 0;0 0 1;0 -100 -10];
B=[0;0;1];
C=[10 0 0 ];
ob=obsv(A,C);
D=0;
r=rank(ob)
P=[-20 -20 -20];
K= acker(A',C',P)
e0=[-0.5 1 0.5];
obs=ss(A-K'*C,[0;0;0],C,0)
[y,t,x]=initial(obs,e0);
plot(t,x),grid
Hình 6.76 Chƣơng trình và đáp ứng Ví dụ 6.29
6.7.2 Kết hợp Điều khiển và Quan Sát Trạng Thái Đầy Đủ
Kết hợp bộ điều khiển hồi tiếp trạng thái với bộ quan sát, phương trình hệ thống
là:
,
u,
y
x Ax b
cx
ˆ ˆ ˆ( ),
ˆ
x Ax b l y cx
kx
u
u Nr
(6.28)
ˆ e x x
( ) e A lc e
Hình 6.77Điều khiển và quan sát đặt cực
Suy ra hệ phương trình của bộ quan sát- điều khiển
65. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
223
0 0
x A bk bk x b
e A lc e
N
r
(6.29)
y
0
x
c
e
Ở xác lập xtiệm cận tiến về giá trị xác lập và e tiệm cận tiến về 0.
Phương trình đặc tính của hệ thống là |sI-A+bk||sI-A+lc| vậy hệ điều khiển và
quan sát độc lập với nhau, ta có thể chọn cực quan sát trùng với cực điều khiển hay
không trùng, tính chất này gọi là nguyên lý phân ly.
Cũng do nguyên lý phân ly, hàm truyền điều khiển hồi tiếp Y(s)/R(s) không phụ
thuộc vào bộ quan sát và có biểu thức giống như trường hợp điều khiển hồi tiếp trạng
thái.
1( )
( )
( )
Y s
s N
R s
c I A bk b (6.30)
Ta tính tiếp hàm truyền giữa U(s) và Y(s) , từ (6.28) với r=0
ˆ ˆ( ) , x A bk lc x ly
Lấy Laplace 1ˆ ( ) ( ) ( )
X I A bk lc ls s Y s
1
( ) ( ) ( )
k I A bk lc lU s s Y s
1( )
( ) ( )
( )
k I A bk lc l
U s
s D s
Y s
(6.31)
Sơ đồ điều khiển dùng đặt cực vá quan sát dưới dạng hàm truyền trình bày ở
Hình 6.78. Lúc này hàm truyền vào ra không cón giống (6.30) mà sẽ là
( ) )
( ) ( ) )
Y s G(s
= N
R s 1+D s G(s
(6.32)
Hàm truyền (6.32) có mẫu số là ci oi
1 1
( ) ( )
n n
i i
s p s p , pci, poi là các cực điều
khiển và quan sát.
Nếu r là hàm nấc, muốn yxl=r ta chọn 0
1 ( ) ( )
|
( )
s
D s G s
N
G s
(6.33)
Hình 6.78 Sơ đồ điều khiển đặt cực và quan sát dƣới dạng hàm truyền
66. CHƢƠNG 6
224
Ví dụ 6.30: Xét đối tượng ở Ví dụ6.22, viết chương trình Matlab và simulink
điều khiển đặt cực ở -4±j4 và cực kép quan sát ở -10, sao cho ngõ ra ổn định theo tín
hiêu nấc với sai số xác lập là 0.
s=tf('s')
pc=[-4+j*4 -4-j*4];
po=[-10 -10];
g=1/s^2;
gtt=ss(g);
[a,b,c,d]=ssdata(gtt)
k=acker(a,b,pc)
l=(acker(a',c',po))'
N=1/(-c*((a-b*k)^-1)*b)
ak=[a-b*k b*k;zeros(size(a))
a-l*c ]
bk=[b*N; zeros(size(b))];
ck=[c zeros(size(c))];
gttk= ss(ak,bk,ck,0);
ds=minreal(k*((s*eye(size(a))
-a+b*k+l*c)^-1)*l)
t=0:0.01:3;
u=ones(size(t));
x0=[0;0;0;0];
[y,t,x]=lsim(gttk,u,t,x0);
plot(t,x)
hold
plot(t,y)
Kết quả tính toán của chương trình
a =
0 0
1 0
b =
1
0
c =
0 1
d =
0
k =
8 32
l =
100
20
N =
32
x0 =
0
0
0
0
gttk =
a =
x1 x2 x3 x4
x1 -8 -32 8 32
x2 1 0 0 0
x3 0 0 0 -100
x4 0 0 1 -20
b =
u1
x1 32
x2 0
x3 0
x4 0
c =
x1 x2 x3 x4
y1 0 1 0 0
d =
u1
y1 0
ds =
1440 s + 3200
----------------
s^2 + 28 s + 292
.
67. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
225
Ta tiếp tục khảo sát điều khiển dưới dạng hàm truyền theo sơ đồ Hình 6.78. Hàm
truyền là
22
2 2
2 2
1
( ) ) 28 292
1 1440 3200( ) ( ) ) ( 8 32)( 28 100)1
28 292
Y s G(s s ss= N N N
sR s 1+D s G(s s s s s
s s s
Vậy chọn N=800/73
Hình 6.79 Sơ đồ Simulink và đáp ứng Ví dụ 6.30
Phần kế tiếp trình bày hai ví dụ điều khiển hệ phi tuyến tuyến tính hoá dùng
phương pháp đặt cực.
Ví dụ 6.31: Cho viên bi treo trong từ trường nam châm điện, ta điều khiển dòng
điện vào cuộn dây để viên bi không rơi xuống.
Các phương trình vi phân là
,
2
ki
Mh=Mg-
h
di
V=Ri+L
dt
68. CHƢƠNG 6
226
Hình 6.80 Điều khiển vị trí viên bi treo trong từ trƣờng
M = 0.05 Kg, K = 0.0001, L = 0.01 H, R = 1 Ohm, g = 9.81 m/sec2
,
Ở cân bằng, với một giá trị i0 cố định ta có giá trị h0 tương ứng là ki2
/Mg, với
h0=10mm, dòng i0 khoảng 7A. Tuyến tính hoá quanh điểm cân bằng này và chọn các
biến trạng thái như sau
1
2
3
x δh
x = δh
x δi
Ta được phương trình trạng thái với u=δV, y=δh
0 1 0 0
980 0 2.8 , 0 , 1 0 0
0 100 10 100
A b c
Ta sẽ khảo sát đáp ứng vị trí của viên bi quanh điểm cân bằng trong hai trường
hợp: trường hợp 1 hồi tiếp biến trạng thái với tín hiệu vào điều khiển viên bi di chuyển
1mm, trường hợp 2 dùng bộ quan sát ổn định vi trí quanh điểm cân bằng với giá trị
ban đầu lệch 10mm.
clc
close all
A =[0 1 0;980 0 -2.8;0 0 -100];
B =[0;0;100];
C =[1 0 0];
ct_rank=rank(ctrb(A,B))
ct_p = [-20 + 20i -20 - 20i -
100];
K = place(A,B,ct_p)
ND=-(C*(A-B*K)^-1*B)
sys_cl = ss(A-B*K,B/ND,C,0);
htk_ct=tf(sys_cl)
t = 0:0.01:0.5;
u = 0.001*ones(size(t));
x0 = [0.01 0 0];
lsim(sys_cl,u,t)
title('Linear Simulation Results
with Reference Input')
xlabel('Time (sec)')
ylabel('Ball Position (m)')
axis([0 0.5 0 1.2*10^-3])
%Simulation with Observer
ob_p=[-100 -100 -100];
ob_rank=rank(obsv(A,C))
Ke=acker(A',C',ob_p)'
At=[A-B*K B*K;zeros(size(A)) A-
Ke*C ];
Bt=[B/ND; zeros(size(B))];
Ct=[C zeros(size(C))];
sys = ss(At,Bt,Ct,0);
htk_ob=tf(sys)
figure
lsim(sys,zeros(size(t)),t,[x0
x0]);
title('Linear Simulation Results
with Observer no Input')
xlabel('Time (sec)')
ylabel('Ball Position (m)')
69. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
227
ct_rank =
3
K =
-775.7143 -20.6429 0.4000
ND =
-0.0035
htk_ct =
8e04
-----------------------------
s^3 + 140 s^2 + 4800 s + 8e04
ob_rank =
3
Ke =
200
10980
0
htk_ob =
8e04
-----------------------------
s^3 + 140 s^2 + 4800 s + 8e04
Hình 6.81 Đáp ứng vị trí viên bi
Ví dụ 6.32: Con lắc gồm một thanh khối lượng m quay trong mặt phẳng thẳng
đứng quanh một trục nằm ngang gắn trên xe di chuyển, khoảng cách từ trục quay đến
trọng tâm thanh là l, góc quay là θ theo chiều kim, ma sát của xe là b, khi con lắc thẳng
đứng θ=0, xe có khối lượng M, lực u làm xe di chuyển khoảng đường x. Thiết kế bộ
điều khiển sao cho con lắc ổn định ở vị trí thẳng đứng hướng lên và điều khiển được vị
trí xe theo hàm nấc.Phương trình toán hệ thống đã được tính trong chương 2
2
( ) cos sinM m x bx ml ml u
2
( ) sin cos 0I ml mgl mlx
70. CHƢƠNG 6
228
Hình 6.82Con lắc ngƣợc trên xe
Trường hợp con lắc là một thanh nhẹ chiều dải l và ở đầu là viên bi kích thước
nhỏ khối lượng m thì trọng tâm cách trục quay là l và moment quán tính I=0.
Ta điều khiển con lắc phi tuyến bằng phương pháp tuyến tính nên phải tìm
phương trình tuyến tính hoá của con lắc, vì bài toán là ổn định quanh θ=0 nên θ rất
nhỏ, sinθ≈0, cosθ=1, 2
=0, 2
0 , phương trình toán tuyến tính hóa con lắc là
( )M m x bx ml u
l x g
Hàm truyền giữa θ và u là
3 2
( )
( ) ( )
s s
U s Mls bls M m gs bg
Đa thức mẫu số có hệ số âm , hệ hở không ổn định.
Hàm truyền giữa x, u và θlà
2
2
( ) ( )
( )
( )
U s mls s
X s
M m s bs
Đặt biến trạng thái 1 1 2 3 3 4, , ,x x x x x x x , phương trình trạng thái là
1 1 1
2 2 2
3 3 3
4 4 4
0 1 0 0 0
( ) 1
0 0
, 0 0 1 0
0 0 0 1 0
1
0 0
x x xM m g b
x x xMl Ml Ml
u
x x x
x x xmg b
M M M
y
M = 2 kg, m = 0.1 kg, l = 0.5 m, b =1N/m/s
1 1
2 2
3 3
4 4
0 1 0 0 0
20.601 0 0 1 1
0 0 0 1 0
0.4905 0 0 0.5 0.5
x x
x x
u
x x
x x
71. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
229
Đầu tiên phải tìm hạng của của ma trận điều khiển được bằng hàm
rank(ctrb(A,B)) kết quả là 4. Chọn 4 cực là-1 ±j 3 , -5, -5 ta tính được độ lợi
K=[-75.5973 -17.3967 -11.9926 -11.7933]
clc
close all
M=2;m=0.1;l=0.5;b=1;
A=[0 1 0 0;(M+m)*9.81/M/l 0 0
b/M/l;
0 0 0 1;-m*9.81/l 0 0 -b/M];
B=[0;-1/M/l;0;1/M];
C=[0 0 1 0];
D=0;
rank(ctrb(A,B))
P=[-1+j*sqrt(3) -1-j*sqrt(3) -5 -
5];
K=acker(A,B, P)
nd=-C*((A-B*K)^-1)*B
x0=[pi*2/36 0 0
0];%initialconditions
sys=ss(A-B*K,B/nd,C,D);
% Control cart Position at 0.1m
t=0:0.01:6;
u=0.1*ones(size(t));
[y,t,X]=lsim(sys,u,t,x0);
plot(t,X(:,1))
title('Pendulum Angle (Radian)')
grid on
figure
plot(t,y)
grid on
title('Cart Position (m)')
figure
plot(t,-K*X'+u/nd)
grid on
title('Control Input (N)')
Hình 6.83 Kết quả mô phỏng Ví dụ 6.32
Kết quả mô phỏng cho thấy con lắc được giữ ổn định ở vị trí đứng khi xe di
chuyển 0.1m và góc lệch ban đầu là 20o
.
Thực chất ta đang mô hình hệ phi tuyến bởi mô hình tuyến tính hóa, kết quả
không chính xác lắm, sau đây dùng simulink xây dụng mô hình phi tuyến con lắc và
kiểm tra chất lượng điều khiển.
Phương trình toán viết lại là
2
cos sinbx ml ml u
x
M m
2
sin cosmgl mlx
I ml
72. CHƢƠNG 6
230
Hình 6.84Mô phỏng simulink con lắc ngƣợc trên xe
Hình 6.84 cho thấy kết quả mô phỏng mô hình phi tuyến tương tự mô hình tuyến
tính hóa.
Tiếp theo ta dùng thuật toán quan sát điều khiển, ta đo x3=y, từ đó ước lượng các
biến trạng thái còn lại
%Observer_ control t=0:0.01:10;
73. THIẾT KẾ BỘ ĐIỀU KHIỂN LIÊN TỤC
231
rank(obsv(A,C))
ob_p=[-2 -2 -2 -2]
Ke=acker(A',C',ob_p)'
At=[A-B*K B*K;zeros(size(A)) A-
Ke*C];
Bt=[B/nd; zeros(size(B))];
Ct=[C zeros(size(C))];
sys = ss(At,Bt,Ct,0);
figure
u=0.1*ones(size(t));
[y,t,X]=lsim(sys,u,t,[x0 x0]);
plot(t,X(:,1))
title('Pendulum Angle (Radian)')
grid on
figure
plot(t,y)
grid on
title('Cart Position (m)')
Hình 6.85 Mô phỏng quan sát điều khiển con lắc ngƣợc trên xe
Kết quả mô phỏng bộ quan sát - điều khiển cho thấy hệ thống có độ vọt lố lớn, xe
di chuyển tới 2.5m trước khi trởvề 0.1m. Cần chọn lại vị trí các cực để kết quả chấp
nhận được.
6.7.3 Quan sát giảm bậc
Trường hợp tín hiệu ra y là biến trạng thái x1, ta chỉ cần ước lượng n-1 biến trạng
thái còn lại, bộ quan sát gọi là giảm bậc. Ta phân vector trạng thái thành hai phần, ma
trận A và vector b phân chia tương tự
1
e
x
x
x
1 11 1e 1 1
e e1 ee e e
a
x a A x b
x a x b
u (6.34)
1
e
1
0
x
x
y
Phương trình trạng thái cho biến đo được
1 11 1 1 a xe ex = y = a y bu
Hay 11 1 1 a xe ey - a y bu (6.35)
Phương trình trạng thái cho biến ước lượng
11 x A x be ee e ea y u (6.36)