Download to read offline

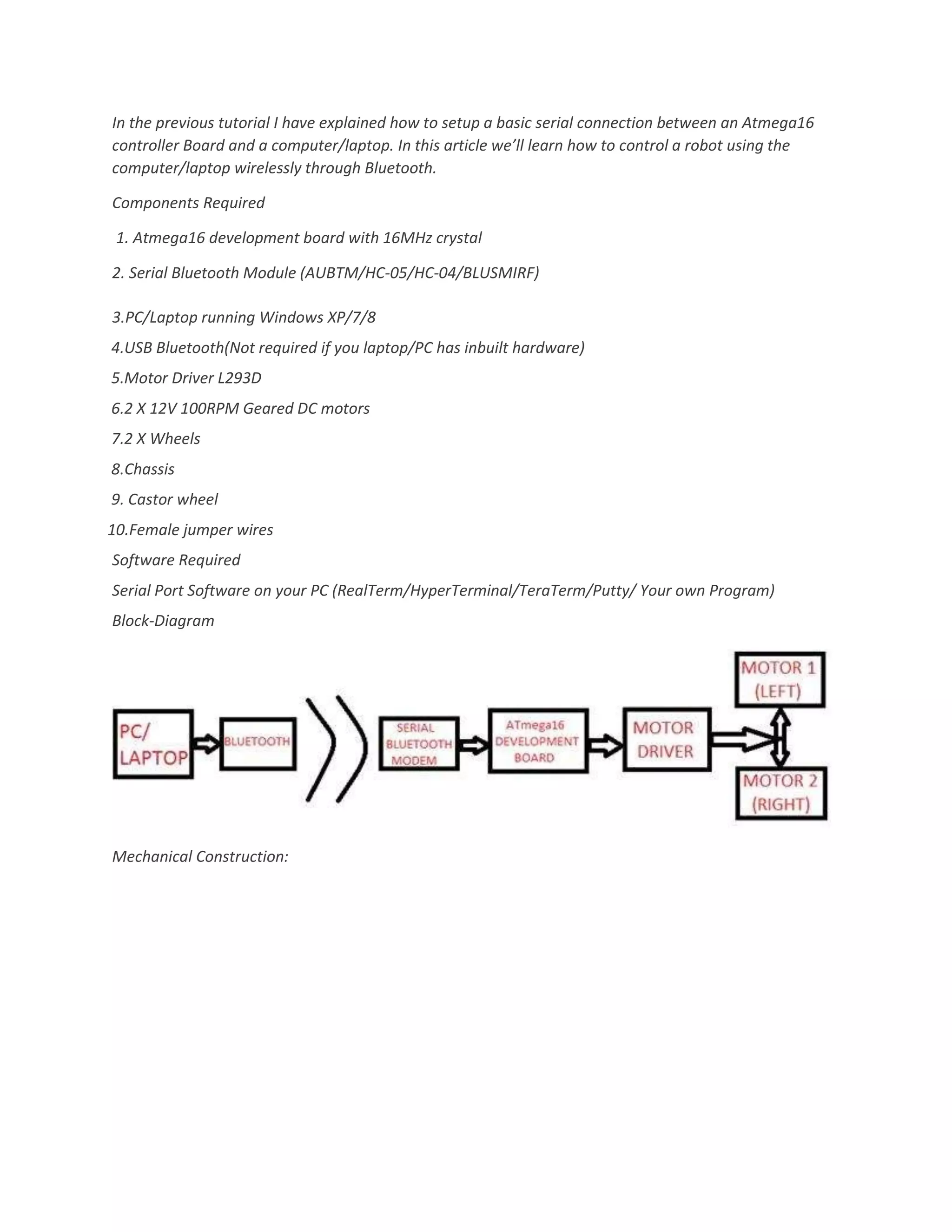
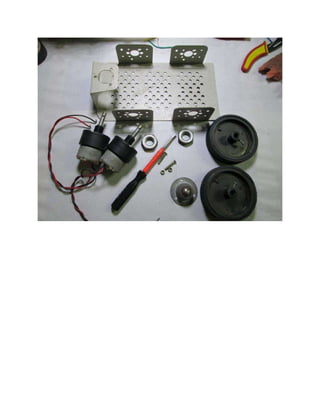
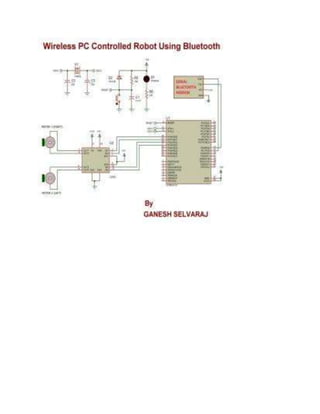

In 3 sentences or less, here is a summary of the key points from the document: The document discusses how to control a robot wirelessly using Bluetooth by connecting an Atmega16 development board with a serial Bluetooth module and motors to a laptop or PC running serial port software. It lists the required components including an Atmega16 board, Bluetooth module, motor driver, motors, wheels, chassis and castor wheel along with jumper wires and software. A block diagram and mechanical construction details are also mentioned.




















































