More Related Content

PDF

PDF

PDF

PDF

PDF

PDF
BluemixとIBM DevOps Servicesで始めるアプリケーション開発 
PDF

PDF
What's hot

PDF

PPTX
IBM Bluemix Node-REDを使って簡単アプリ作成を体験する 
PDF
IBM Eclipse tools for Bluemix の構成手順 
PDF
大容量ファイルを爆速で転送! 世界を飛び回る! AsperaとSoftLayerの最強コラボ! 
PDF
【JSLGG】お手軽watsonアプリ開発セミナー 
PPTX
IBM Bluemix DevOps Services のプロジェクトを Eclipse にインポートする ~ IBM Eclipse Tools for... 
PPTX
IBM Bluemix DevOps Services で Javaの Web アプリを開発する 
PDF
SoftLayerが CAMSSとゲーム配信 に適する技術的理由 
PDF

PDF
サーバーレスの基本とCI/CD構築 & 運用 〜システムは動いてからが本番だ〜 
PDF

PPTX
Twilio bluemix hands-on 資料 
PDF

PPTX
【Twilio勉強会 with Bluemix in 福岡】 電話のボタン応答無しで!?音声認識による自動回答サービスを作ろう! 
PPTX
Twilio x SendGrid x Bluemix 実践ハンズオン 
PDF
より良い登壇を目指して今すぐできること re:Master #devio2020 
PDF
Watsonを使ってAIアプリを作ってみよう!-ハンズオン- 
PDF
見せます! 半歩先のクラウド型アプリケーション開発 
PDF

PPT
Softlayer と Bluemix (IaaS と PaaS) 適材適所でアプリケーション開発 Viewers also liked

PPTX
【共通版】 IBM Cloud (SoftLayer) 最新動向情報 2017年11月版 v1.0 
PDF

PDF

PDF

PDF

PPTX
IBM Bluemix infrastructure SoftLayer はじめての見積もりの仕方 softlayer 
PDF
SoftLayer上に構成するBluemixをご存知ですか 
PDF

PPTX
東急ハンズのクラウドデザインパターン アーキテクチャー編 
PDF

PDF

PDF

PPTX
Node-red+JSONataでfunction地獄からの卒業 
PDF

PDF
AWS IoT アップデート 2016.02.16 
PDF

PDF
OSSを活用して進化しつづける IBMクラウドとコグニティグ・ ソリューションIBM Watsonの最新情報 
PPTX
Fabric Composer - Construct 2017 
PDF
Similar to Bluemixと既存システムとの連携

PDF
進化を続けるIBM Bluemix 最新情報(2015年3月) 
PDF
Osc sapporo introduction of bluemix 
PDF
2014.11.12 ibm bluemix pdf 
PDF

PPT
Bluemix体験レポート@第3回soft layer勉強会 20140901_ver.2 
PPTX
Watson日本語版ハッカソン Day1 Bluemix 概要紹介 
PPT
Bluemix体験レポート@第3回札幌SoftLayer勉強会 20140901 
PPTX
2016年12月7日(水)CMS & MA Summit 冬の小祭 
PDF

PDF

PPTX

PDF
Developers Summit 2015 【19-E-4】 体感!「IBM Bluemix」が実現するリアルに迅速な開発 
PPTX
Ibm bluemix handson the weather company api 
PDF
ビジネス変革の基盤となるIBM Bluemix ~基礎から最新の取り組みまで~ 
PPTX
イノベート・ハブ九州 Bluemix勉強会#3 
PDF
IBM Bluemix Infrastructure (SoftLayer) introduction 
PDF
イノベート・ハブ九州 Bluemix勉強会(第2回) 
PDF
IBM bluemix api connect によるAPIエコノミーの実現 20170426 
PDF
クラウドネイティブなアナリティクス基盤 - IBM Bluemix 
PDF
2017秋「クラウドファースト時代における基幹業務システム開発革新セミナー」 超高速開発を実現するIBMクラウドの最新情報ご紹介2017 More from IBMソリューション

PDF

PDF

PDF

PDF

PDF

PDF

PDF
Zマイスターとの新たな価値探求 System zとz/OS 
PDF

PDF

PDF

PDF
Zマイスターとの新たな価値探求 WebSphere 
PDF

PDF

PDF

PDF
Recently uploaded

PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版 
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」 
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信 
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis 
PPTX

PDF

PDF
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜 
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector 
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望 Bluemixと既存システムとの連携
- 1.
- 2.
© 2014 IBMCorporation
2
IBM Bluemix
www.bluemix.net
ご注意
この資料は日本アイ・ビー・エム株式会社および日本アイ・ビー・エム システムズ・エンジニアリング株
式会社の正式なレビューを受けておりません。
資料の内容には正確を期するよう注意しておりますが、この資料の内容は2014年09月現在の情報であり
、製品の新しいリリース、修正などによって動作/仕様が変わる可能性があります。
当資料は、資料内で説明されている製品の仕様を保証するものではありません。従って、この情報の利⽤
またはこれらの技法の実施はひとえに使⽤者の責任において為されるものであり、資料の内容によって受
けたいかなる被害に関しても⼀切の補償をするものではありません。
また、IBM、IBMロゴおよびibm.comは、世界の多くの国で登録されたInternational Business
Machines Corporationの商標です。他の製品名およびサービス名等は、それぞれIBMまたは各社の商標
である場合があります。現時点でのIBMの商標リストについては
http://www.ibm.com/legal/copytrade.shtmlをご覧ください。
- 3.
© 2014 IBMCorporation
3
IBM Bluemix
www.bluemix.net
アジェンダ
既存システムとの連携の必要性
Bluemixと既存システムとの連携形態
Cloud Integrationアドオン
まとめ
- 4.
© 2014 IBMCorporation
4
IBM Bluemix
www.bluemix.net
既存システムとの連携の必要性
- 5.
© 2014 IBMCorporation
5
IBM Bluemix
www.bluemix.net
これからの企業システム新たなビジネス領域
Systems of Record
(定型業務処理システム)
Systems of Engagement
(協働のための情報活用システム)
Internet of Things
(“モノ”のインターネット)
クラウド・ベース・
サービス
Systems of Interaction 相互に関わりあうシステム
- 6.
© 2014 IBMCorporation
6
IBM Bluemix
www.bluemix.net
バックオフィス・システムとの統合は課題
顧客向けシステムとバックオフィス・システムと
の統合は大きな課題になっている
効果的な顧客向けシステム構築にあたり、最も技術的な課題となっているものは?
出典:A commissioned study conducted by Forrester Consulting on behalf of IBM, Q1 2013
バックオフィス・システムとの
不十分な統合
不十分なセキュリティー
不十分なマスター・データ管理
不十分なコンテンツ管理
予測不可能なパフォーマンス
42%
35%
34%
30%
30%
- 7.
© 2014 IBMCorporation
7
IBM Bluemix
www.bluemix.net
既存システムとの連携の必要性
既存資産の有効活⽤(1/2)
SoRのデータをSoEでも利⽤したい
CRMなどの顧客情報システムのデータ活⽤し、
特定の顧客に特化したモバイル・サービスを提供する
ソーシャル・メディアのデータと顧客データを利⽤し、
アナリティクスの技術により顧客動向をより詳細に分析する
お客様センター
CRM
Bluemix環境
顧客向けサイト
ユーザー
ユーザー
- 8.
© 2014 IBMCorporation
8
IBM Bluemix
www.bluemix.net
既存システムとの連携の必要性
既存資産の有効活⽤(2/2)
フロントエンド・システムで取得した情報をSoRに保管
顧客ニーズの変化が激しい部分は、Bluemixで迅速、かつ、柔軟
にアプリケーションを開発する
重要なデータは、堅牢な既存システムに保管する
お客様センター
顧客DB
ユーザー
キャンペーンサイト
モバイル
アプリケーション
ユーザー
Bluemix環境
- 9.
© 2014 IBMCorporation
9
IBM Bluemix
www.bluemix.net
Bluemixと既存システムとの連携形態
- 10.
© 2014 IBMCorporation
10
IBM Bluemix
www.bluemix.net
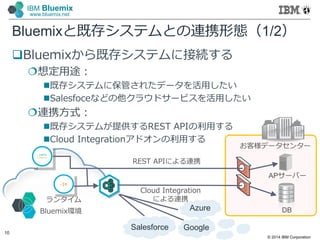
Bluemixと既存システムとの連携形態(1/2)
Bluemixから既存システムに接続する
想定⽤途:
既存システムに保管されたデータを活⽤したい
Salesfoceなどの他クラウドサービスを活⽤したい
連携方式:
既存システムが提供するREST APIの利⽤する
Cloud Integrationアドオンの利⽤する
ランタイム
Bluemix環境
お客様データセンター
APサーバー
DB
REST APIによる連携
Cloud Integration
による連携
Salesforce
Azure
Google
- 11.
© 2014 IBMCorporation
11
IBM Bluemix
www.bluemix.net
Bluemixと既存システムとの連携形態(2/2)
既存システムからBluemixに接続する
想定⽤途:
外部サービスのMashup基盤としてBluemixを利⽤し、
そこで構築したサービスを既存システムから利⽤したい
連携方式:
Bluemix上のサービスをREST APIで公開し、利⽤する
ランタイム
Bluemix環境
お客様データセンター
APサーバー
REST APIによる連携
Cloudant
1.各種サービスに対して
RESTインターフェースを作成する
2.RESTインターフェースを持つ
サービスを利⽤する
- 12.
© 2014 IBMCorporation
12
IBM Bluemix
www.bluemix.net
Cloud Integrationアドオン
- 13.
© 2014 IBMCorporation
13
IBM Bluemix
www.bluemix.net
Cloud Integration
Bluemix上で稼動するアプリケーションから、既存
システムへアクセスする手段を提供するアドオン
実績豊富なクラウド統合製品Cast Ironの技術を利⽤
既存システムに対してHTTPベースのRESTfulなアクセス
を実現
ランタイム
Bluemix環境
お客様データセンター
Cloud
Integration
Cast Iron Live
DB
Salesforce
Azure
Google
セキュア・
コネクター
- 14.
© 2014 IBMCorporation
14
IBM Bluemix
www.bluemix.net
Cloud Integrationアドオン
Bluemixのランタイムに関連付け
クラウド統合に必要な設定情報を管理
クラウド統合API
セキュア・コネクター: 既存システム統合に利⽤
Integration: クラウド環境統合に利⽤
3種類のクラウド統合APIの作成方法を提供
作成方法により、連携可能なシステムが異なる
エンタープライズ
・エンドポイント
からの生成
Cast Iron Live
Orchestration
からの生成
Bluemixアプリ
からの生成
- 15.
© 2014 IBMCorporation
15
IBM Bluemix
www.bluemix.net
Cloud Integrationのシステム連携パターン
1. エンタープライズ・エンドポイントとの連携
既存システムのデータベース(DB2, Oracle)と
SAPに対するCRUD操作
テーブルの結合など、複雑な操作は実行できない
2. Cast Iron Live管理のエンドポイントとの連携
データベースに加え、FTPやDomino、Salesforce
などCast Ironが接続できる多様なシステムと連携
DB2やOracleに対して、複雑なクエリーを実行可能
3. Bluemix上のRESTアプリケーションとの連携
RESTアプリケーションのAPIをカタログとして管理
- 16.
© 2014 IBMCorporation
16
IBM Bluemix
www.bluemix.net
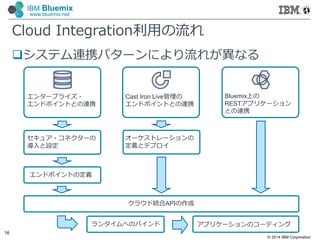
Cloud Integration利⽤の流れ
システム連携パターンにより流れが異なる
エンタープライズ・
エンドポイントとの連携
Cast Iron Live管理の
エンドポイントとの連携
Bluemix上の
RESTアプリケーション
との連携
セキュア・コネクターの
導入と設定
エンドポイントの定義
オーケストレーションの
定義とデプロイ
クラウド統合APIの作成
ランタイムへのバインド アプリケーションのコーディング
- 17.
© 2014 IBMCorporation
17
IBM Bluemix
www.bluemix.net
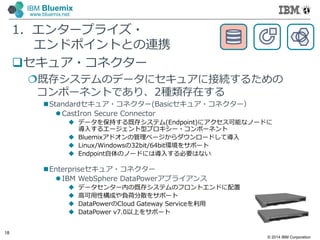
1.エンタープライズ・
エンドポイントとの連携
既存システムのデータベース(DB2, Oracle)と
SAPに対するCRUD操作のAPIを簡単に作成可能
テーブルの結合など、複雑な操作は実行できない
Cast Iron Liveで手動設定する箇所を、
Cloud Integrationアドオンが隠蔽してくれる
セキュア・コネクターの管理
エンドポイントの生成
システム連携処理(オーケストレーション)の生成
具体的な設定方法は、参考資料を参照
- 18.
© 2014 IBMCorporation
18
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携
セキュア・コネクター
既存システムのデータにセキュアに接続するための
コンポーネントであり、2種類存在する
Standardセキュア・コネクター(Basicセキュア・コネクター)
CastIron Secure Connector
データを保持する既存システム(Endpoint)にアクセス可能なノードに
導入するエージェント型プロキシー・コンポーネント
Bluemixアドオンの管理ページからダウンロードして導入
Linux/Windowsの32bit/64bit環境をサポート
Endpoint自体のノードには導入する必要はない
Enterpriseセキュア・コネクター
IBM WebSphere DataPowerアプライアンス
データセンター内の既存システムのフロントエンドに配置
高可⽤性構成や負荷分散をサポート
DataPowerのCloud Gateway Serviceを利⽤
DataPower v7.0以上をサポート
- 19.
© 2014 IBMCorporation
19
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携
セキュア・コネクターの通信
セキュア・コネクターは、Cast Iron Live Gatewayの
443番ポートに対してSSLで接続する
セキュア・コネクターがProxyとして動作し、この接続を
利⽤してCloud Integrationからの要求をエンドポイントに送信
セキュア・コネクターからCast Iron Live Gatewayに対する
アウトバウンド通信のみ、ファイアウォールで許可すればよい
Bluemix環境
ランタイム
Cloud
Integration
Cast Iron Live
Cast Iron Live Gateway
443番ポート
DB
セキュア・
コネクター
お客様データセンター
- 20.
© 2014 IBMCorporation
20
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携
[参考]自動生成したクラウド統合APIの例
EMAIL FIRST_NAME LAST_NAME ADDRESS TEL
a@b.c xxx yyy zzz 0123
・・・ ・・・ ・・・ ・・・ ・・・
DB2上に定義したCUSTOMERテーブル
APIの生成
GETメソッドは、
select * from CUSTOMER where EMAIL = xxx and ・・・
に相当する処理
- 21.
© 2014 IBMCorporation
21
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携
[デモ]キャンペーン応募⽤の特設Webサイト
⼀時的なサイトのため、Bluemix上で稼動させる
顧客情報は、既存システムにて永続的に保管
Bluemix環境
Node.js
Cloud
Integration
DB2
お客様センター
ユーザー
Secure
Connector
Bluemix2014TechWS_08-1_CloudIntegration.mp4をご覧ください
- 22.
© 2014 IBMCorporation
22
IBM Bluemix
www.bluemix.net
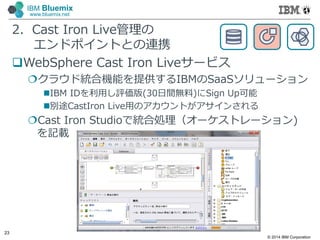
2.Cast Iron Live管理の
エンドポイントとの連携
データベースへの複雑な操作や、DB2/Oracle以外
のDBへの接続、FTPや他クラウドサービスと連携
するAPIを作成可能
オーケストレーションを手動で作成し、
Cast Ironへデプロイするためのスキルが必要
具体的な設定方法は、参考資料を参照
- 23.
© 2014 IBMCorporation
23
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携
WebSphere Cast Iron Liveサービス
クラウド統合機能を提供するIBMのSaaSソリューション
IBM IDを利⽤し評価版(30日間無料)にSign Up可能
別途CastIron Live⽤のアカウントがアサインされる
Cast Iron Studioで統合処理(オーケストレーション)
を記載
- 24.
© 2014 IBMCorporation
24
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携
[デモ]オーケストレーションの例
Cast Iron Liveと接続するための
HTTPエンドポイント
既存システムと接続するための
データベースエンドポイント
必須 任意
Cast Iron Liveからの要求を受信 Cast Iron Liveへ結果を送信
データベースに対するselect文を定義
照会結果をJSON形式に変換
必須 必須
任意
Bluemix2014TechWS_08-2_CastIron.mp4をご覧ください
- 25.
© 2014 IBMCorporation
25
IBM Bluemix
www.bluemix.net
3.Cast Iron Live管理の
エンドポイントとの連携
既存のBluemixアプリケーションのREST APIを
Cloud Integrationで管理するための操作
APIのカタログをACE UIで管理できる
接続情報をVCAP_SERVICESから取得できるようになる
管理対象とするREST APIのURIを指定
管理対象とするREST APIの
入力パラメーターを指定
使⽤するメソッドの指定
APIの説明を記述
- 26.
© 2014 IBMCorporation
26
IBM Bluemix
www.bluemix.net
共通.クラウド統合APIの利⽤
VCAP_SERVICESに登録された接続情報を利⽤
Cloud Integrationをランタイムにバインドすると、
接続情報がVCAP_SERVICESに登録される
- 27.
© 2014 IBMCorporation
27
IBM Bluemix
www.bluemix.net
共通.クラウド統合APIの利⽤
HTTPリクエスト・ヘッダーに認証情報を付与
API_SECRET:接続情報のAPI_SECRETを使⽤する
Authorization:ベーシック認証の情報を付与する
var env = JSON.parse(process.env.VCAP_SERVICES);
env_cloudint = env['CloudIntegration']['0'].credentials;
var user = env_cloudint.userid;
var password = env_cloudint.password;
var myurl = url.parse(env_cloudint.apis[0].baseurl);
var apikey = env_cloudint.apis[0].API_SECRET;
var options = {
host: myurl.hostname,
auth: user + ':' + password,
headers: {
'API_SECRET': apikey
}
};
・・・(略)・・・
- 28.
© 2014 IBMCorporation
28
IBM Bluemix
www.bluemix.net
Cloud Integrationのシステム連携
3種類の連携パターンとAPI生成方法を紹介
1. エンタープライズ・エンドポイントとの連携
既存システムのデータベース(DB2, Oracle)とSAPに対する
CRUD操作
2. Cast Iron Live管理のエンドポイントとの連携
データベースに加え、FTPやDomino、Salesforceなど
Cast Ironが接続できる多様なシステムと連携
3. Bluemix上のRESTアプリケーションとの連携
RESTアプリケーションのAPIをカタログとして管理
VCAP_SERVICESから接続情報を取得し、
生成したAPIを利⽤
- 29.
© 2014 IBMCorporation
29
IBM Bluemix
www.bluemix.net
まとめ
- 30.
© 2014 IBMCorporation
30
IBM Bluemix
www.bluemix.net
まとめ
顧客向けシステムは、バックオフィス・システム
(既存システム)との連携が重要
BluemixはCloud Integrationアドオンを提供し、
システム連携を実現
既存システムだけでなく、他クラウドサービスや、
Bluemix上のRESTアプリケーションとも連携可能
システム連携方式に応じたクラウド連携APIの生成
VCAP_SERVICESから接続情報を取得し、APIを利⽤
- 31.
© 2014 IBMCorporation
31
IBM Bluemix
www.bluemix.net
参考資料
- 32.
© 2014 IBMCorporation
32
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携:Step1
セキュア・コネクターの構成
Enterpriseセキュア・コネクター構成 Standardセキュア・コネクター構成
①コネクター名を指定し
Add and Install
をクリック
②コネクター⼀覧から Install をクリック
③表示されたダウンロード・構成ページの
リンクからダウンロード、導入
(注意)ブラウザの言語設定を英語にすること
- 33.
© 2014 IBMCorporation
33
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携:Step2
エンドポイントの生成
(注意)ブラウザの言語設定を英語にすること
①API名を入力
②APIの説明を入力
③「Generate from
an Enterprise Endpoint」を選択
- 34.
© 2014 IBMCorporation
34
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携:Step2
エンドポイントの生成
(注意)ブラウザの言語設定を英語にすること
①「Connect to your first Enterprise Endpoint」
を選択
②データベース名、ホスト名、ポート、
接続ユーザー名、接続ユーザーパスワードを入力
- 35.
© 2014 IBMCorporation
35
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携:Step3
クラウド統合APIの作成
(注意)ブラウザの言語設定を英語にすること
①データベースの
スキーマを選択
②データベースの
テーブルを選択
- 36.
© 2014 IBMCorporation
36
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携:Step3
クラウド統合APIの作成
(注意)ブラウザの言語設定を英語にすること
APIを生成するメソッドを選択
- 37.
© 2014 IBMCorporation
37
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携:Step1
Cast Iron Liveの利⽤
①評価版ライセンスに同意
②Cast Iron Liveの画面に遷移
- 38.
© 2014 IBMCorporation
38
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携:Step2
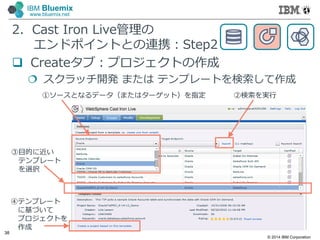
Createタブ:プロジェクトの作成
スクラッチ開発 または テンプレートを検索して作成
①ソースとなるデータ(またはターゲット)を指定 ②検索を実行
③目的に近い
テンプレート
を選択
④テンプレート
に基づいて
プロジェクトを
作成
- 39.
© 2014 IBMCorporation
39
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携:Step3
Modifyタブ:プロジェクトの編集
プロジェクトの連携処理(オーケストレーション)を
各環境のシナリオにあわせて修正・編集
①編集ボタンを
クリックして
プロジェクトを編集
※ 初回のDesigner起動は
ダウンロードのため
時間がかかる
②CastIron Studio (Designer)を
利⽤して連携処理(オーケスト
レーション)を編集
- 40.
© 2014 IBMCorporation
40
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携:Step3
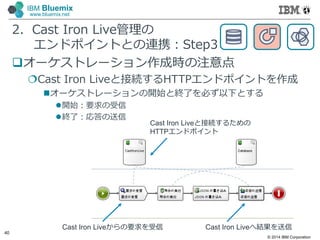
オーケストレーション作成時の注意点
Cast Iron Liveと接続するHTTPエンドポイントを作成
オーケストレーションの開始と終了を必ず以下とする
開始:要求の受信
終了:応答の送信
Cast Iron Liveと接続するための
HTTPエンドポイント
Cast Iron Liveからの要求を受信 Cast Iron Liveへ結果を送信
- 41.
© 2014 IBMCorporation
41
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携:Step4
プロジェクトのデプロイと実行
①実行ボタンをクリック
②Runningとなっていることを確認
- 42.
© 2014 IBMCorporation
42
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携:Step5
クラウド統合APIを作成
ACE UIよりクラウド統合APIを作成
①APIの名前と説明を入力し、
「Create from CastIron Live Orchestrations」
を選択
②Cast Iron Liveのアカウントを入力し、
ログイン
- 43.
© 2014 IBMCorporation
43
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携:Step5
クラウド統合APIを作成
ACE UIよりクラウド統合APIを作成
①作成した
オーケストレーションを選択
②メソッドを選択し、
APIの説明を記入
③パラメータを入力
- 44.
© 2014 IBMCorporation
44
IBM Bluemix
www.bluemix.net
IBM Bluemix
www.bluemix.net
















![© 2014 IBM Corporation
20
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携
[参考]自動生成したクラウド統合APIの例
EMAIL FIRST_NAME LAST_NAME ADDRESS TEL
a@b.c xxx yyy zzz 0123
・・・ ・・・ ・・・ ・・・ ・・・
DB2上に定義したCUSTOMERテーブル
APIの生成
GETメソッドは、
select * from CUSTOMER where EMAIL = xxx and ・・・
に相当する処理](https://image.slidesharecdn.com/bluemix2014techws08cloudintegration-150326215445-conversion-gate01/85/Bluemix-20-320.jpg)
![© 2014 IBM Corporation
21
IBM Bluemix
www.bluemix.net
1.エンタープライズ・
エンドポイントとの連携
[デモ]キャンペーン応募⽤の特設Webサイト
⼀時的なサイトのため、Bluemix上で稼動させる
顧客情報は、既存システムにて永続的に保管
Bluemix環境
Node.js
Cloud
Integration
DB2
お客様センター
ユーザー
Secure
Connector
Bluemix2014TechWS_08-1_CloudIntegration.mp4をご覧ください](https://image.slidesharecdn.com/bluemix2014techws08cloudintegration-150326215445-conversion-gate01/85/Bluemix-21-320.jpg)

![© 2014 IBM Corporation
24
IBM Bluemix
www.bluemix.net
2.Cast Iron Live管理の
エンドポイントとの連携
[デモ]オーケストレーションの例
Cast Iron Liveと接続するための
HTTPエンドポイント
既存システムと接続するための
データベースエンドポイント
必須 任意
Cast Iron Liveからの要求を受信 Cast Iron Liveへ結果を送信
データベースに対するselect文を定義
照会結果をJSON形式に変換
必須 必須
任意
Bluemix2014TechWS_08-2_CastIron.mp4をご覧ください](https://image.slidesharecdn.com/bluemix2014techws08cloudintegration-150326215445-conversion-gate01/85/Bluemix-24-320.jpg)


![© 2014 IBM Corporation
27
IBM Bluemix
www.bluemix.net
共通.クラウド統合APIの利⽤
HTTPリクエスト・ヘッダーに認証情報を付与
API_SECRET:接続情報のAPI_SECRETを使⽤する
Authorization:ベーシック認証の情報を付与する
var env = JSON.parse(process.env.VCAP_SERVICES);
env_cloudint = env['CloudIntegration']['0'].credentials;
var user = env_cloudint.userid;
var password = env_cloudint.password;
var myurl = url.parse(env_cloudint.apis[0].baseurl);
var apikey = env_cloudint.apis[0].API_SECRET;
var options = {
host: myurl.hostname,
auth: user + ':' + password,
headers: {
'API_SECRET': apikey
}
};
・・・(略)・・・](https://image.slidesharecdn.com/bluemix2014techws08cloudintegration-150326215445-conversion-gate01/85/Bluemix-27-320.jpg)