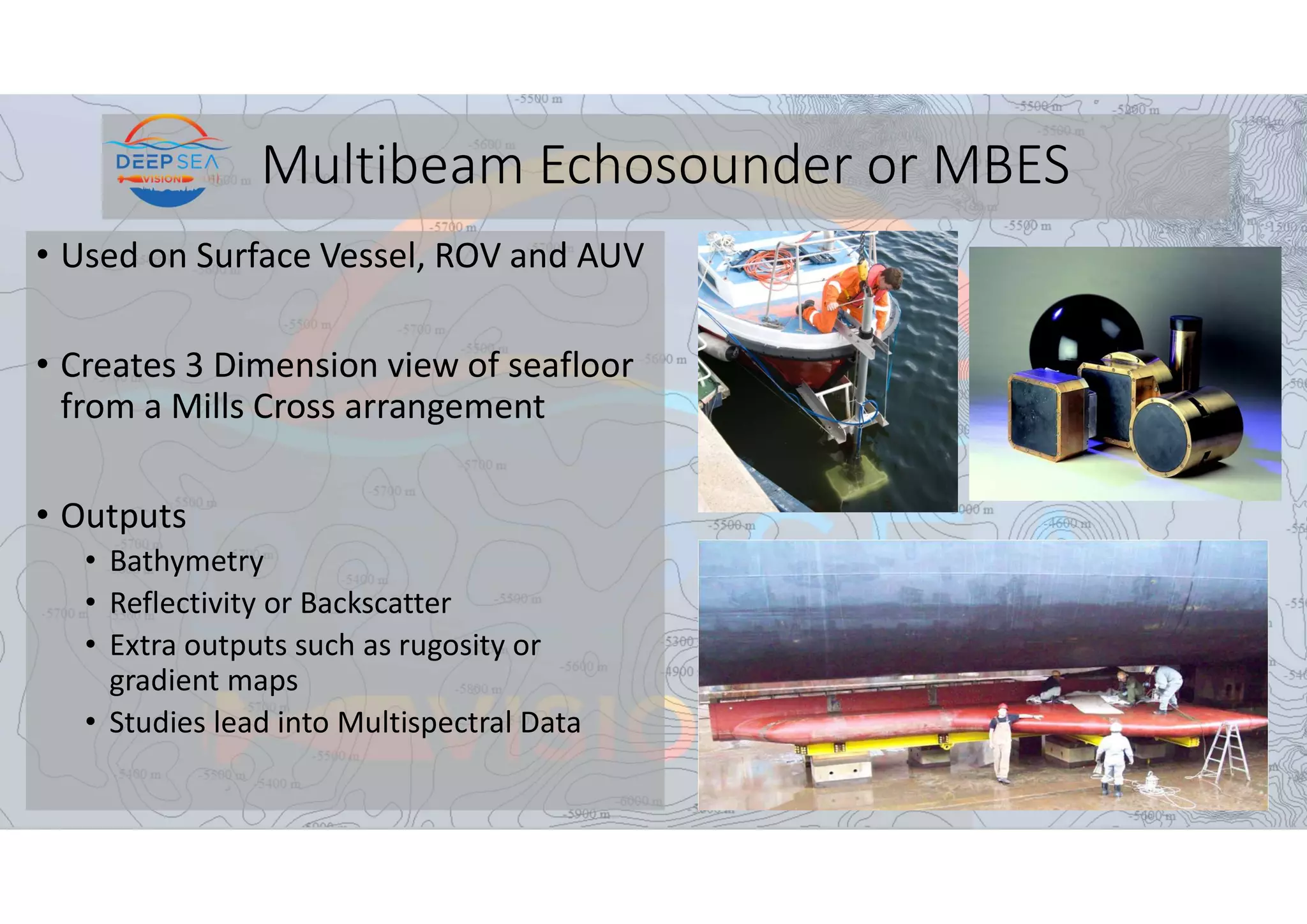
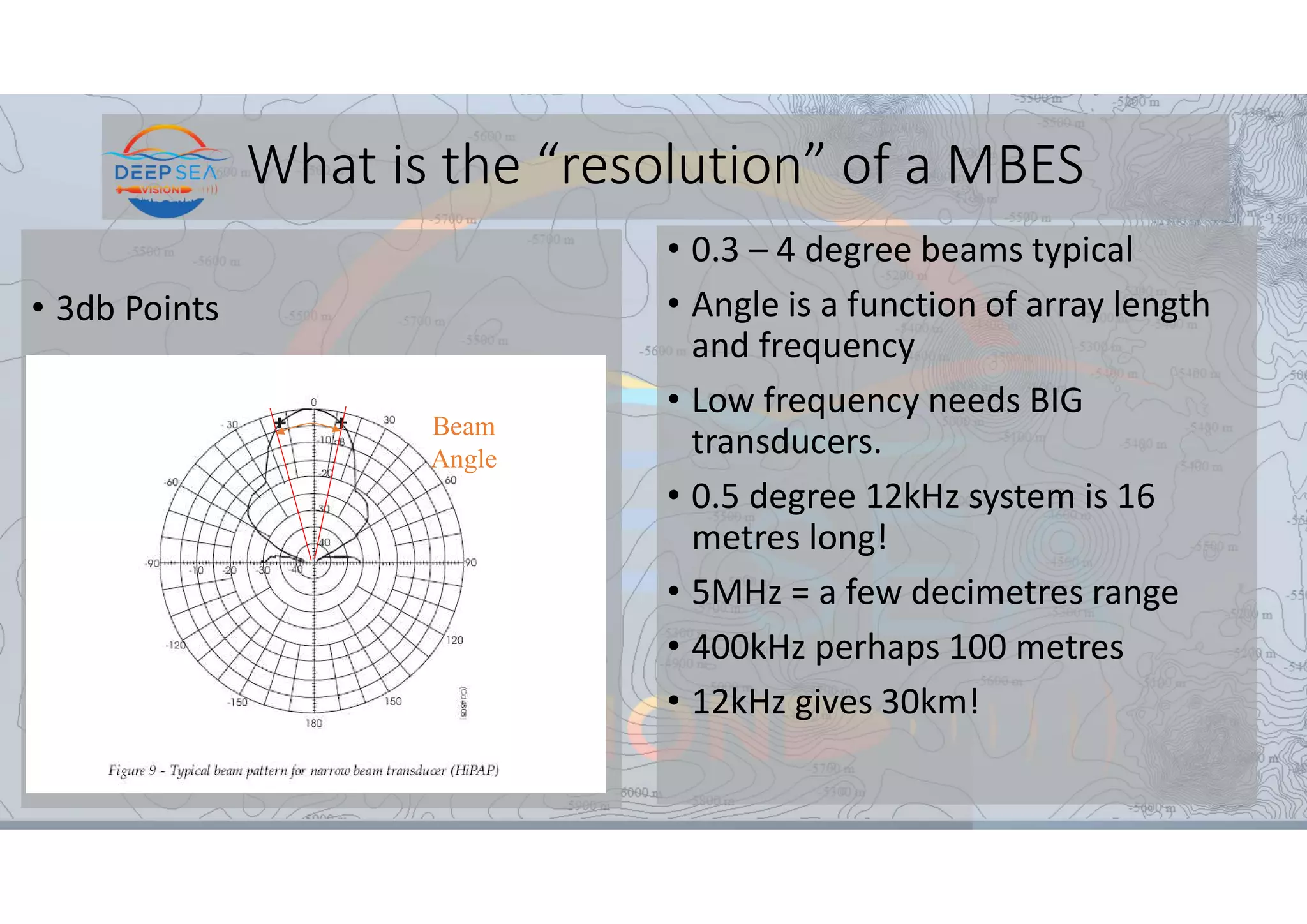
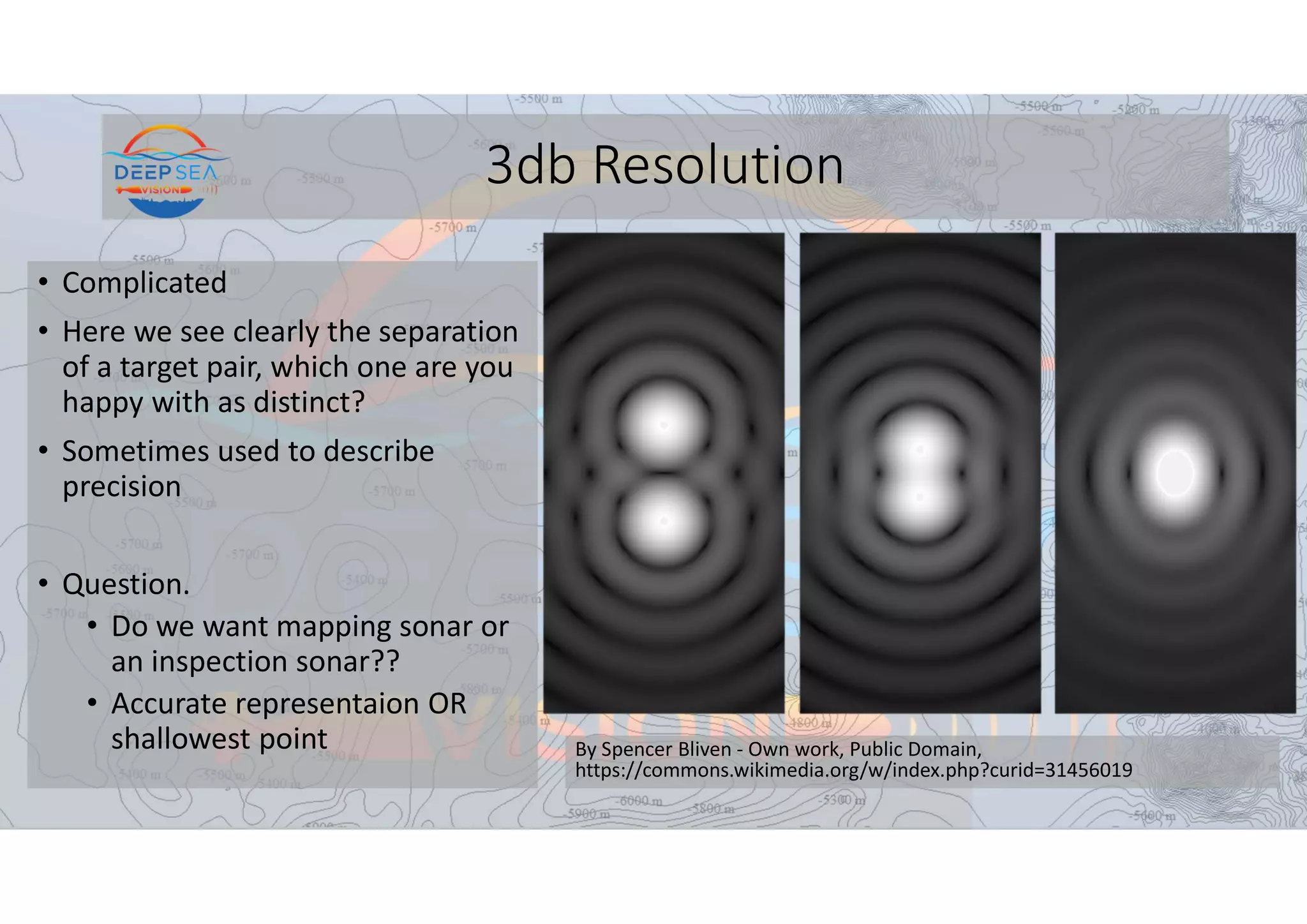
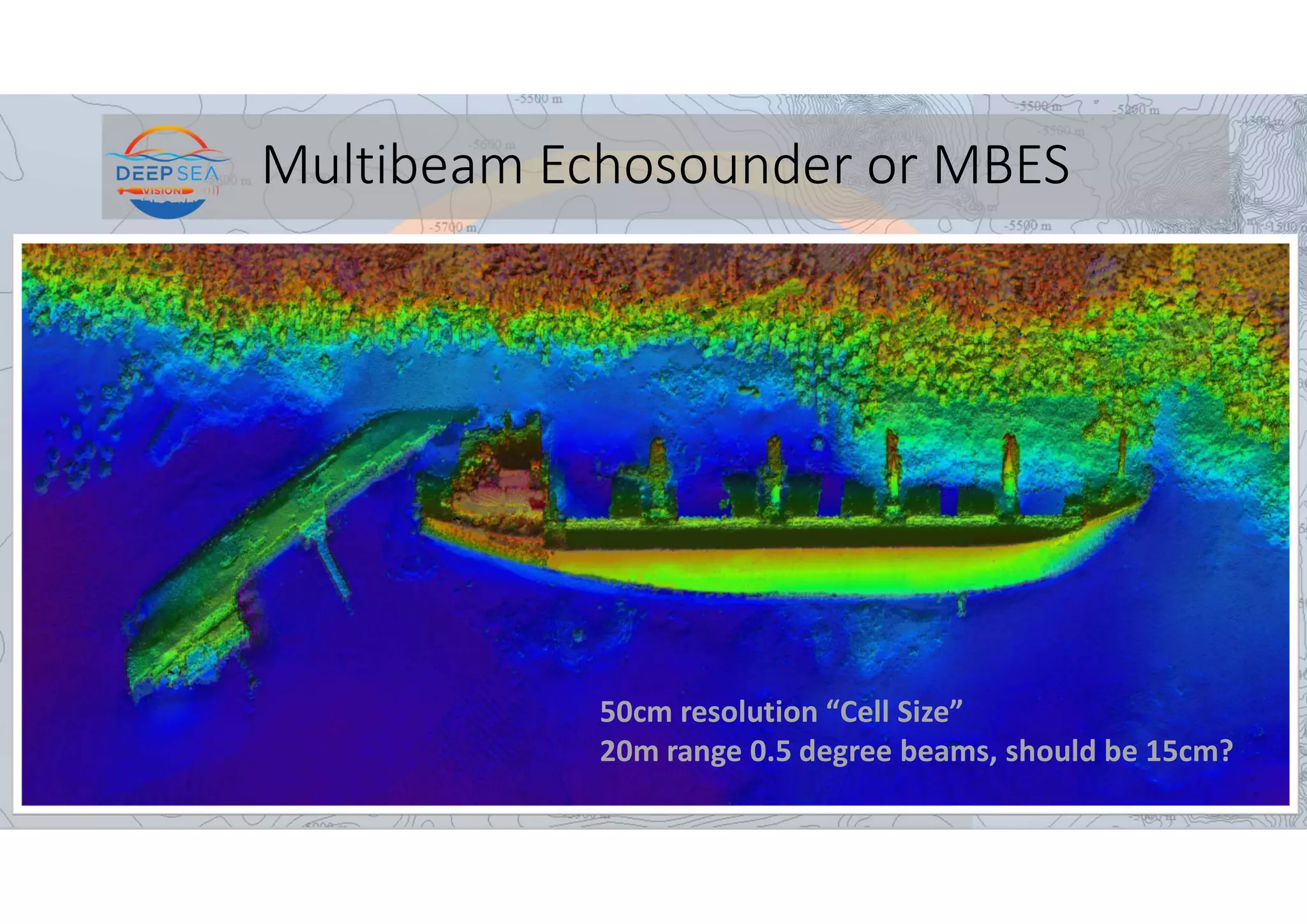
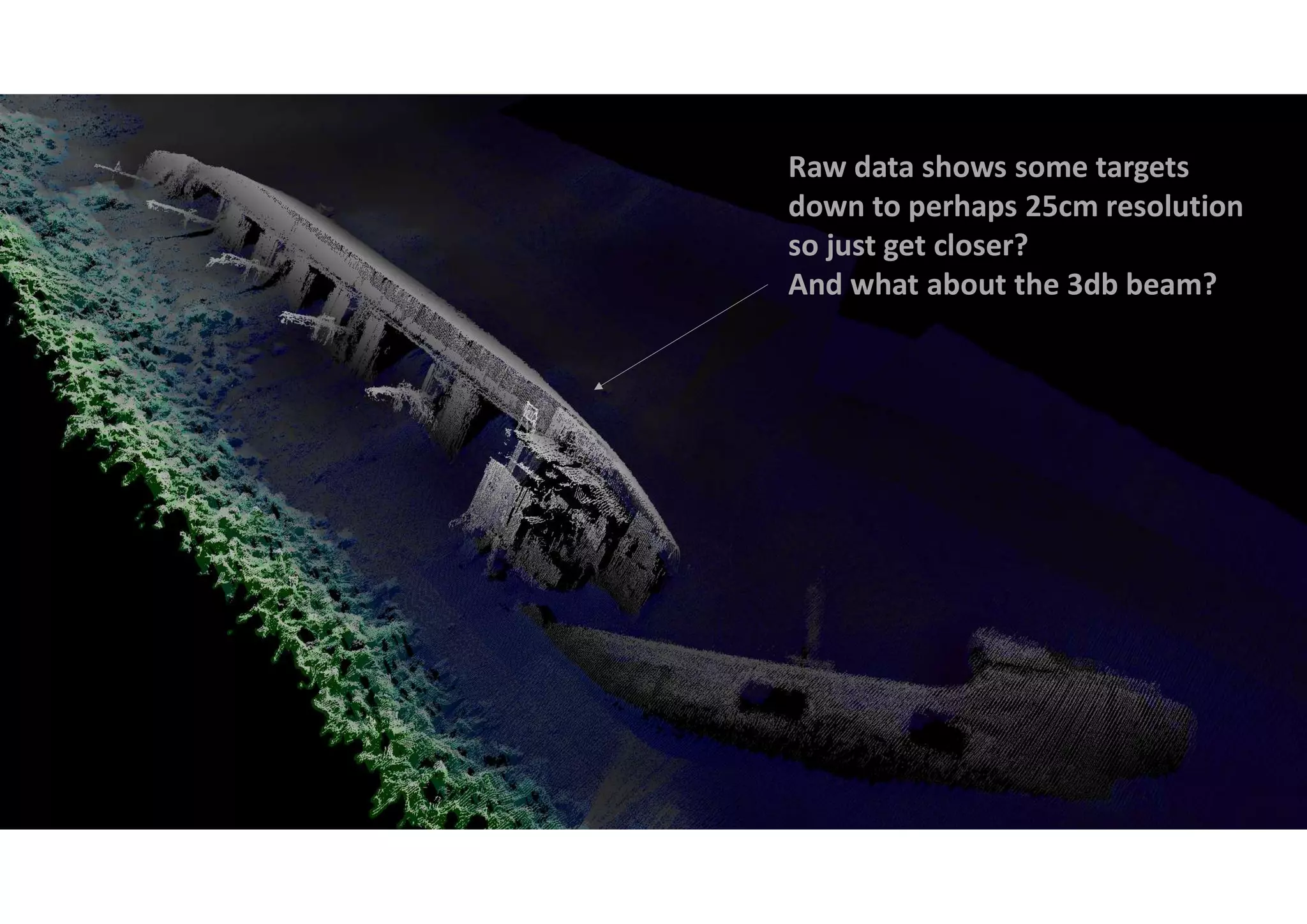
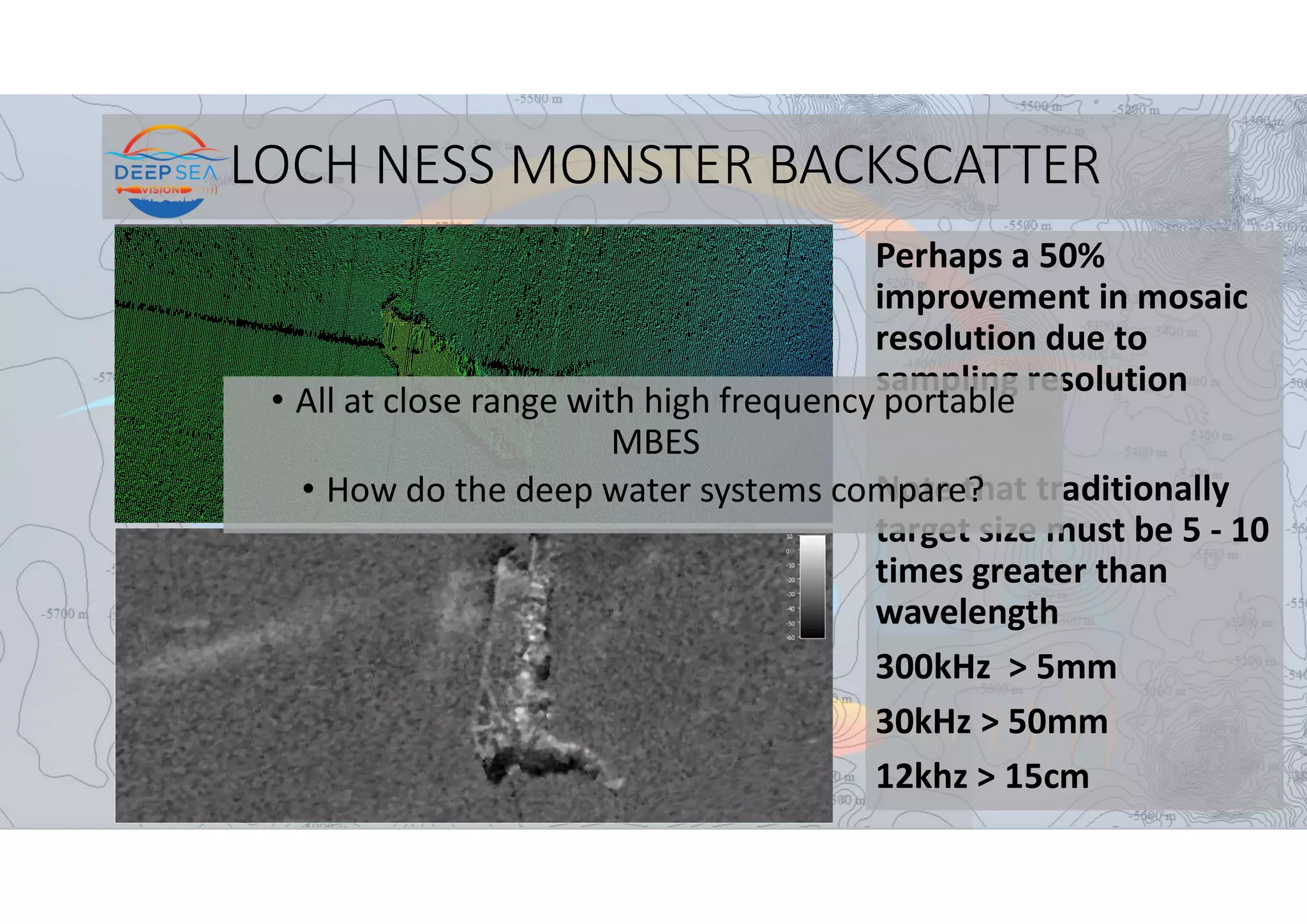
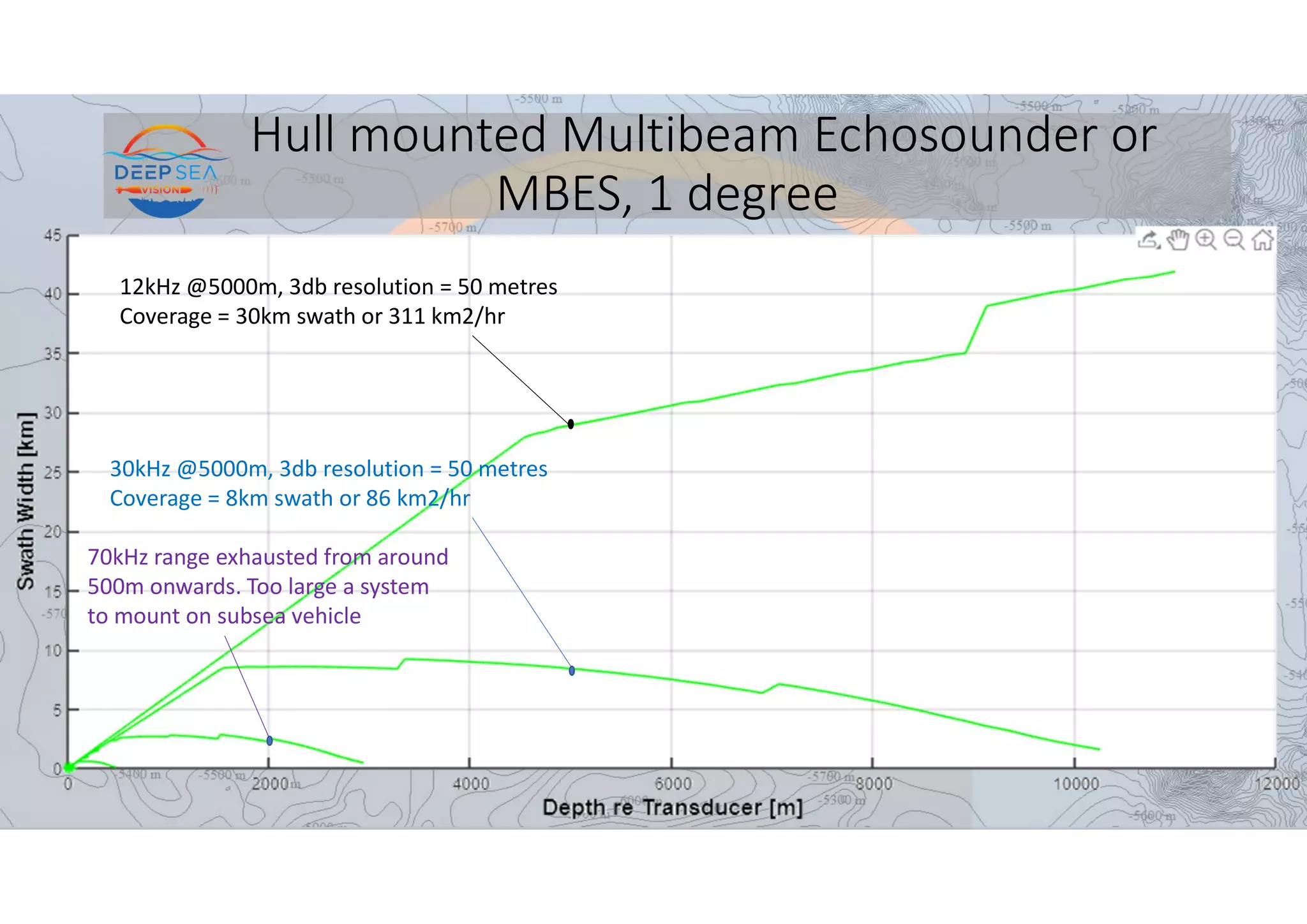
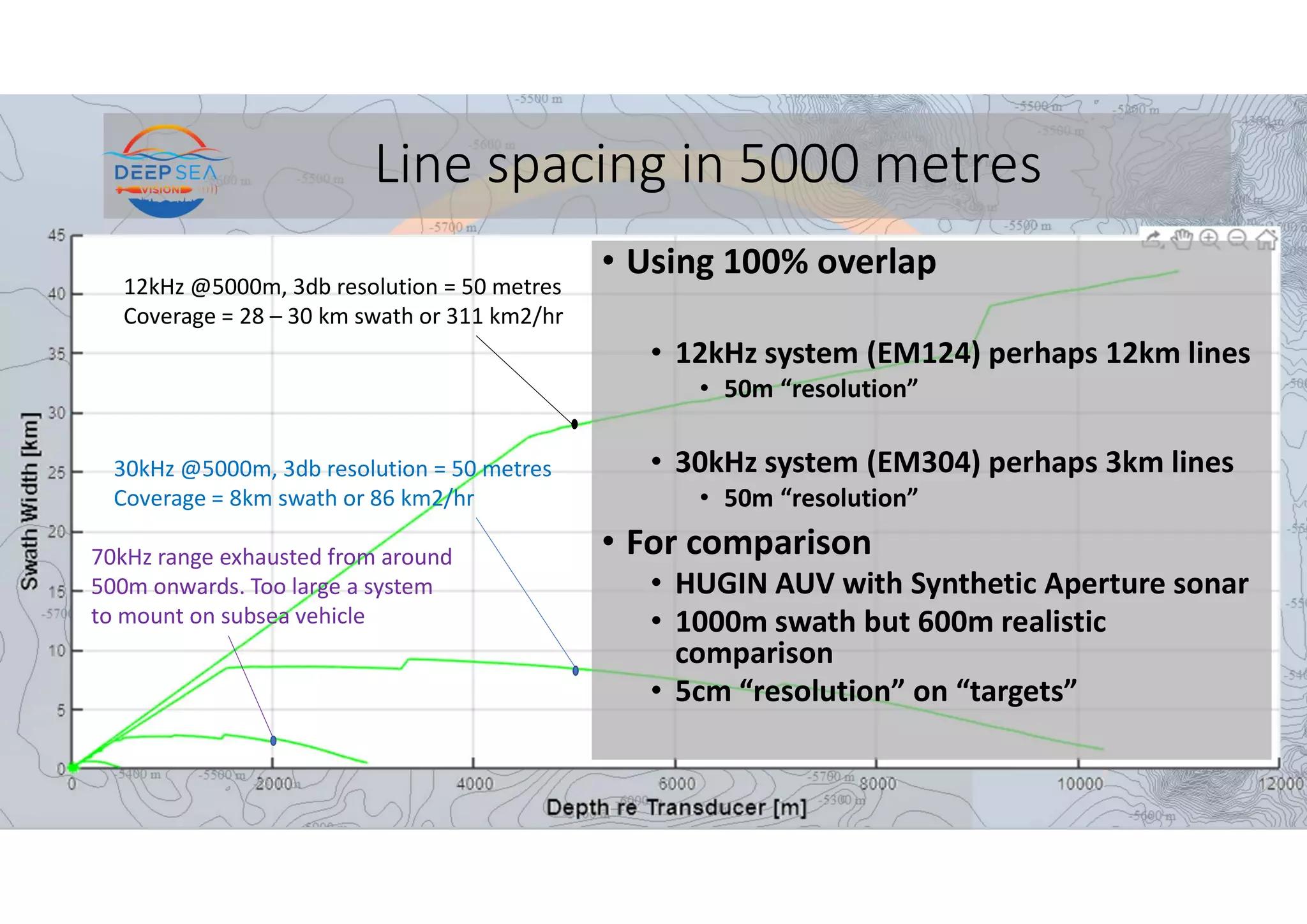
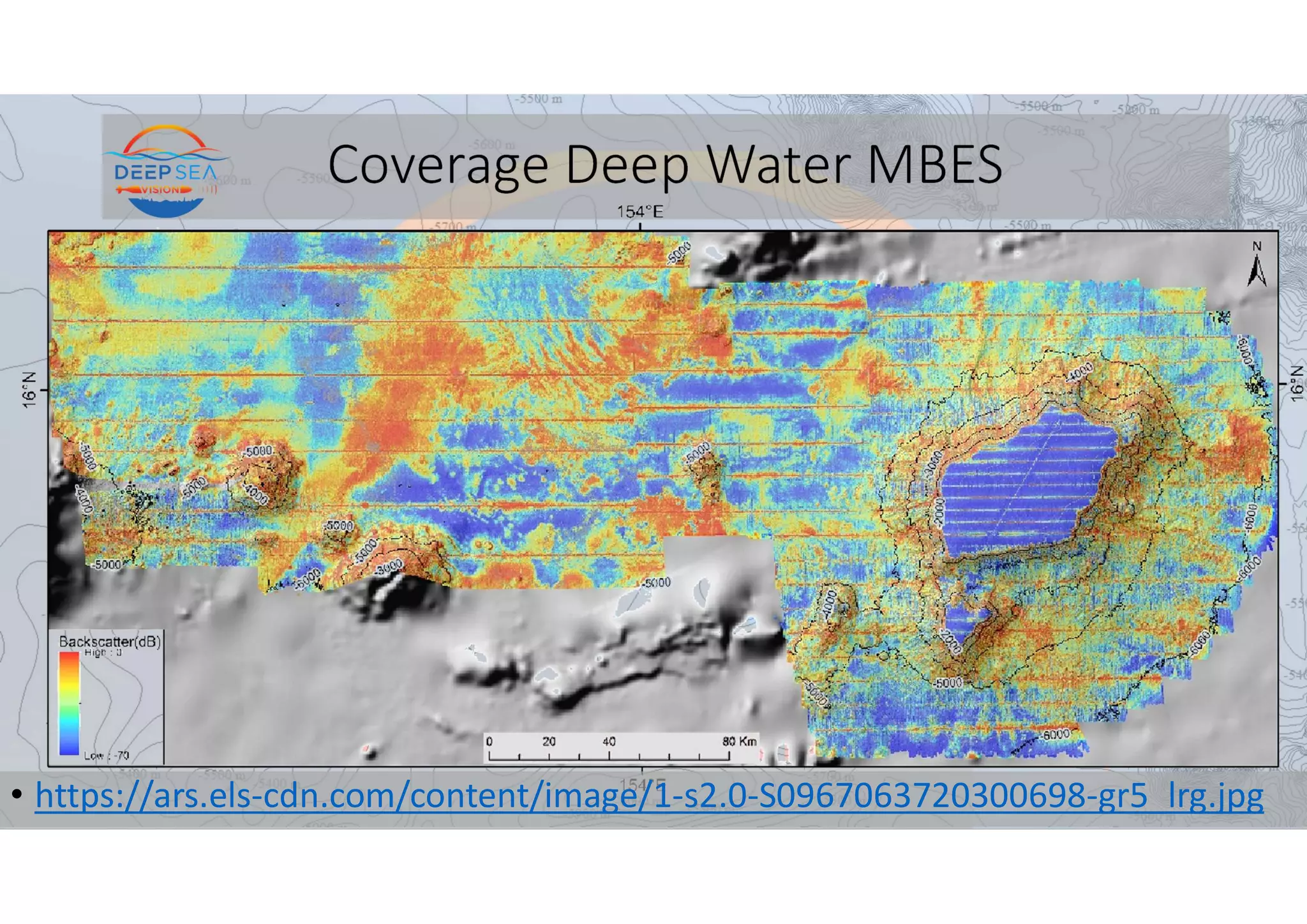
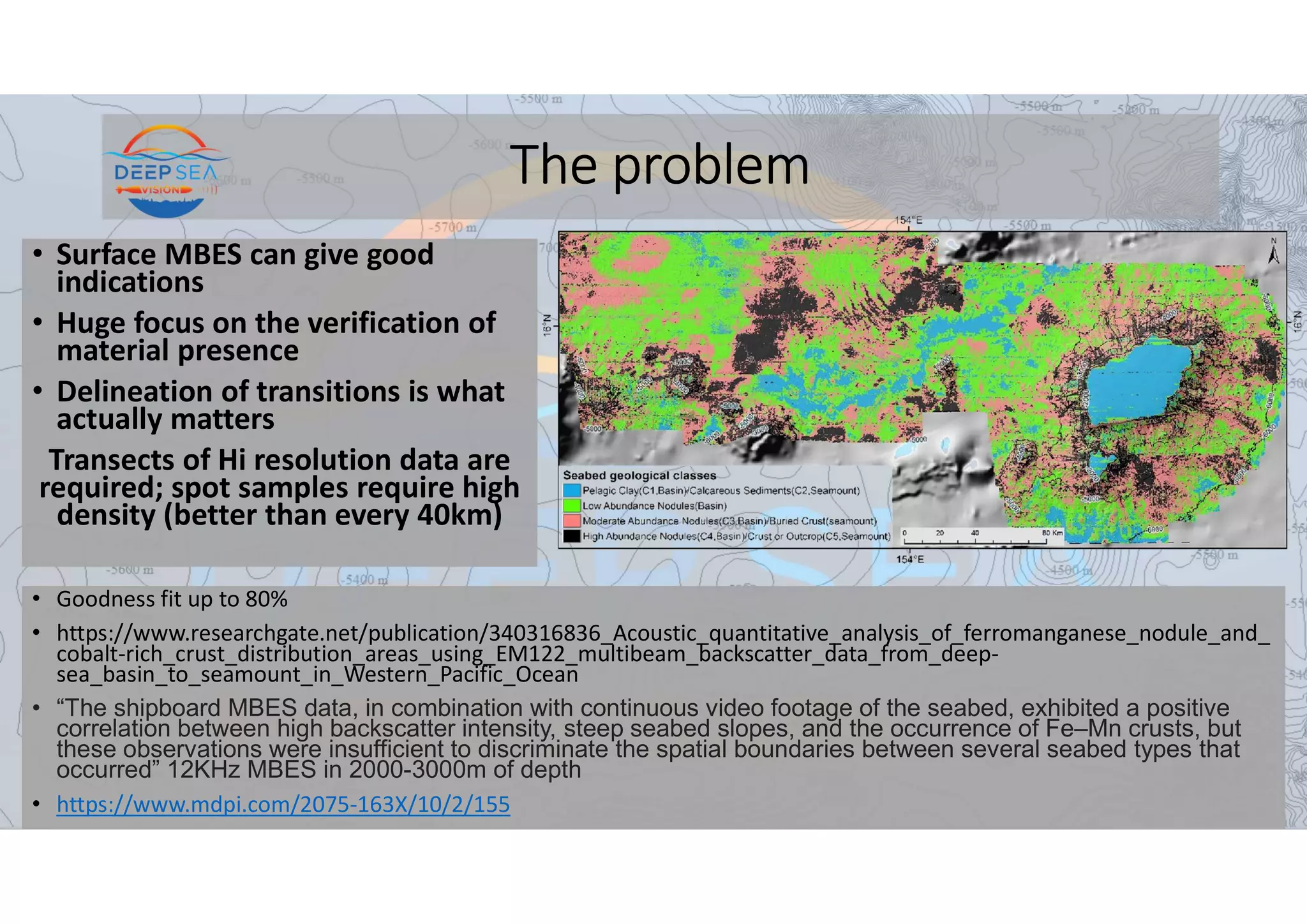
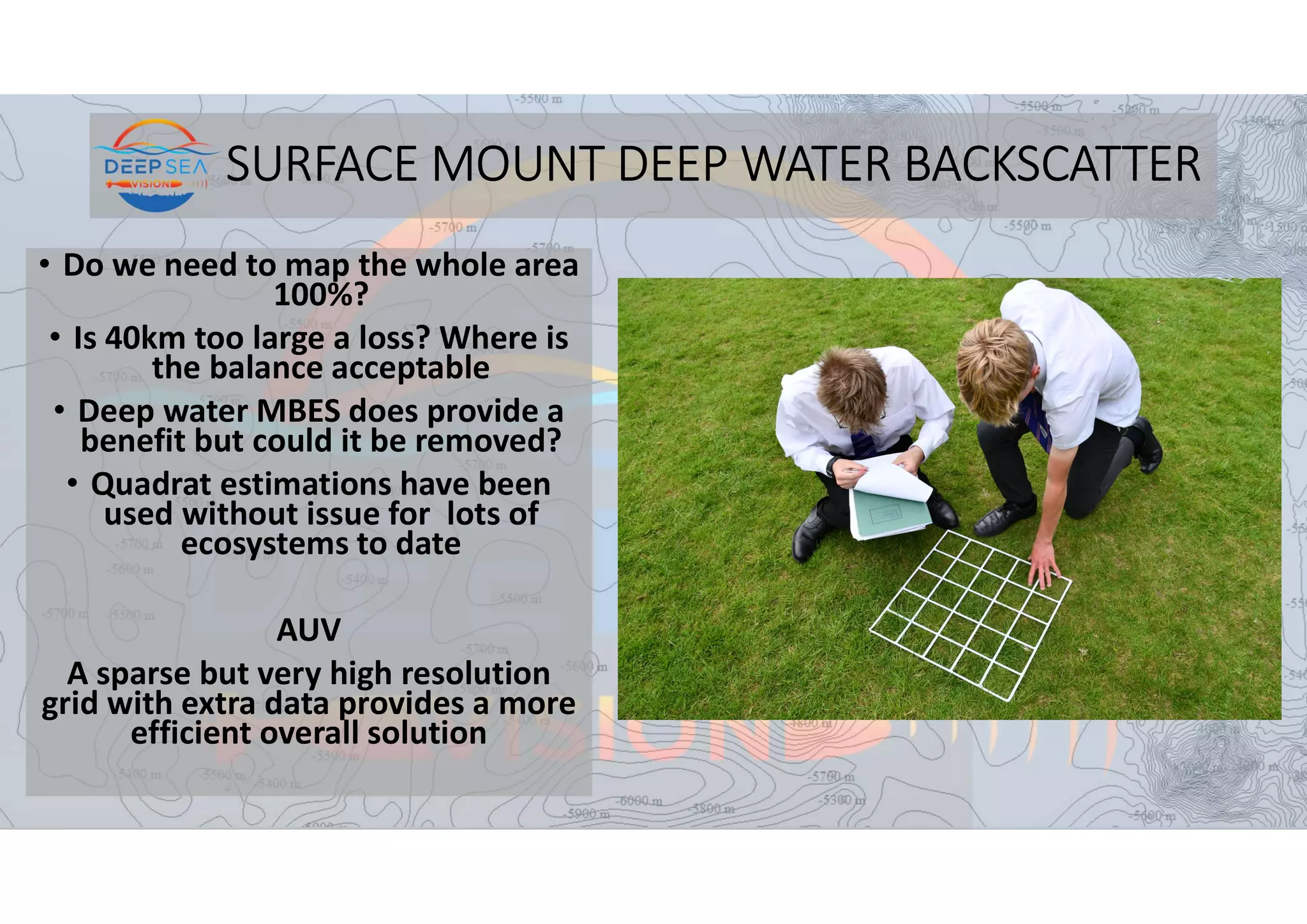
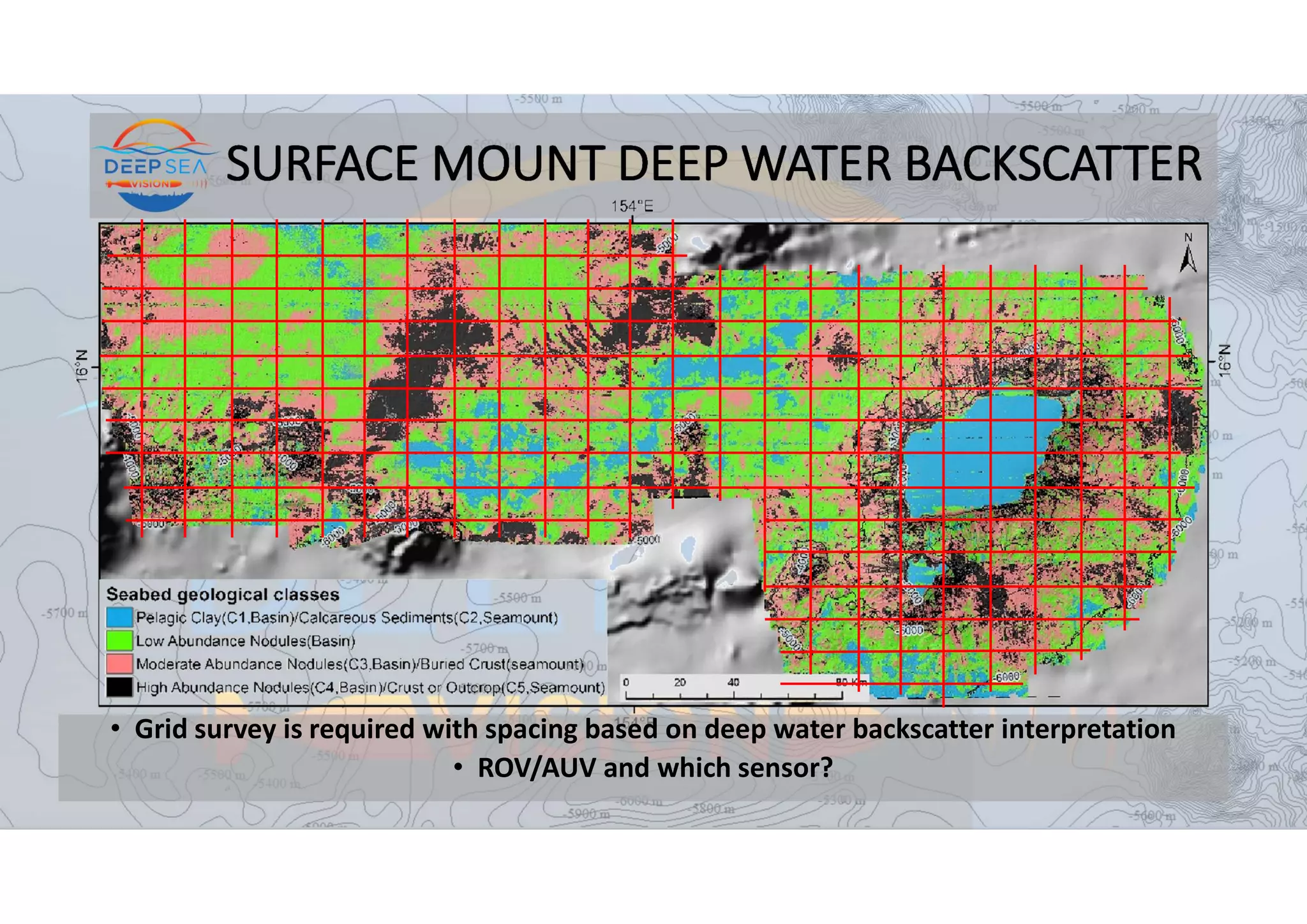
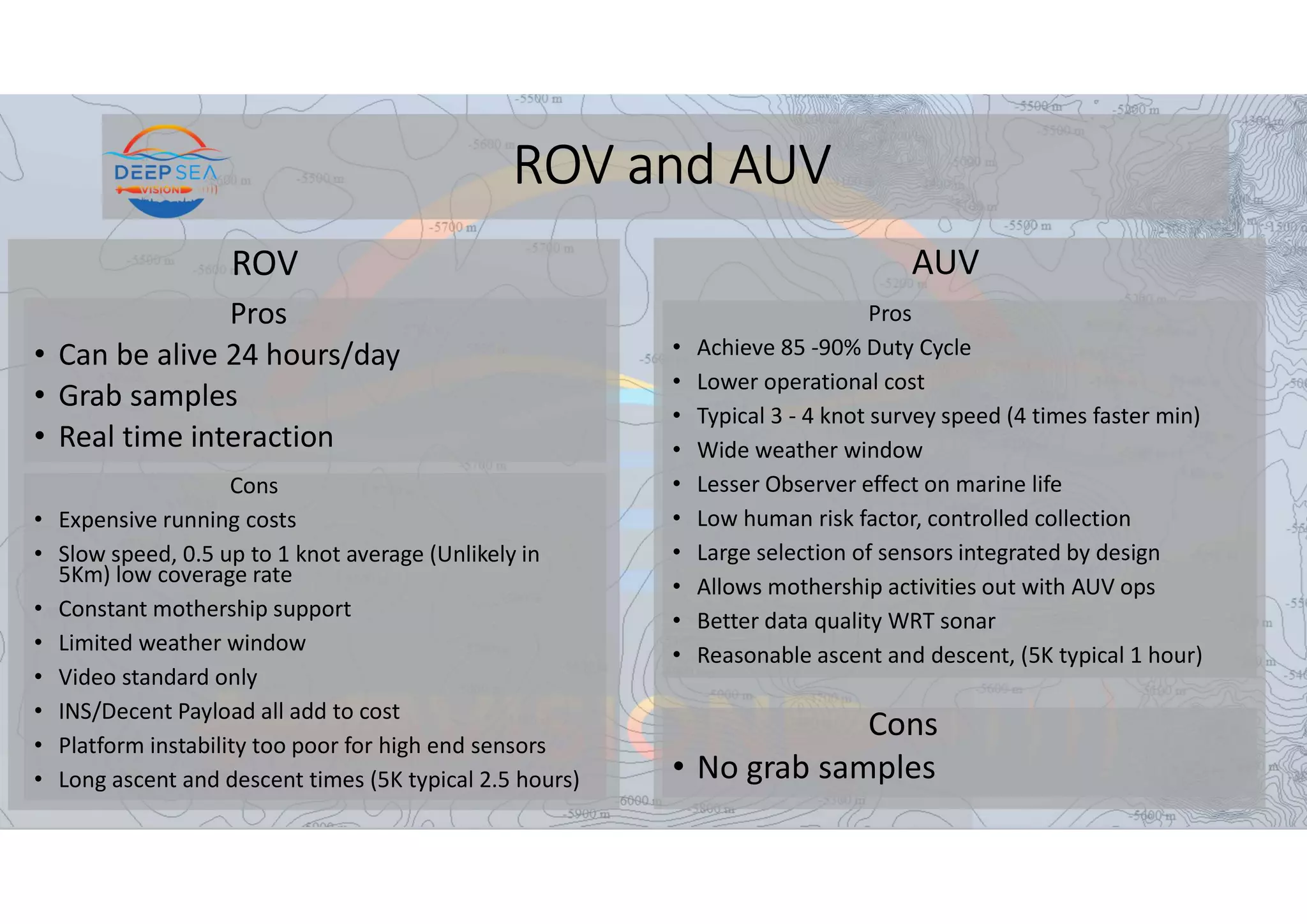
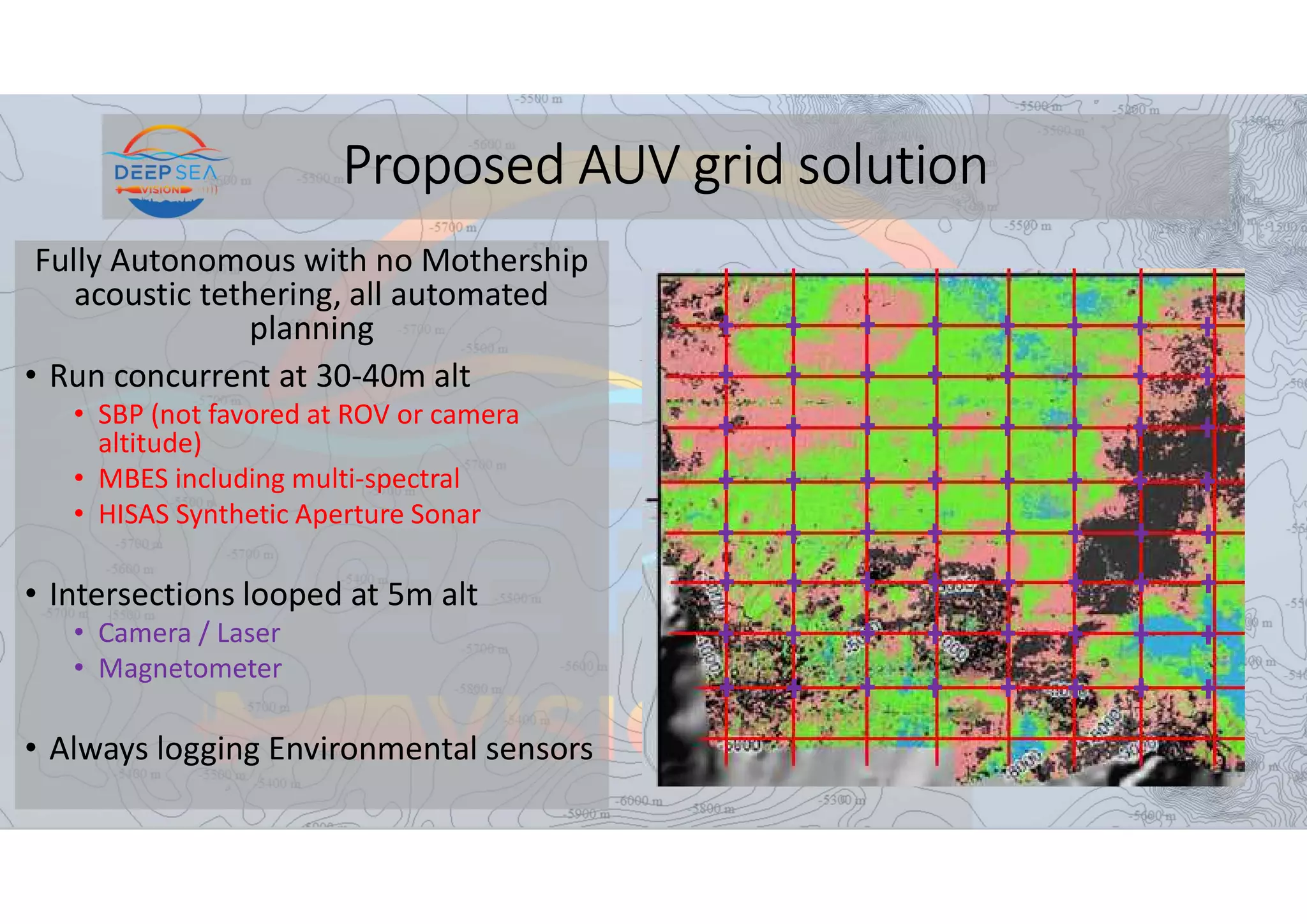
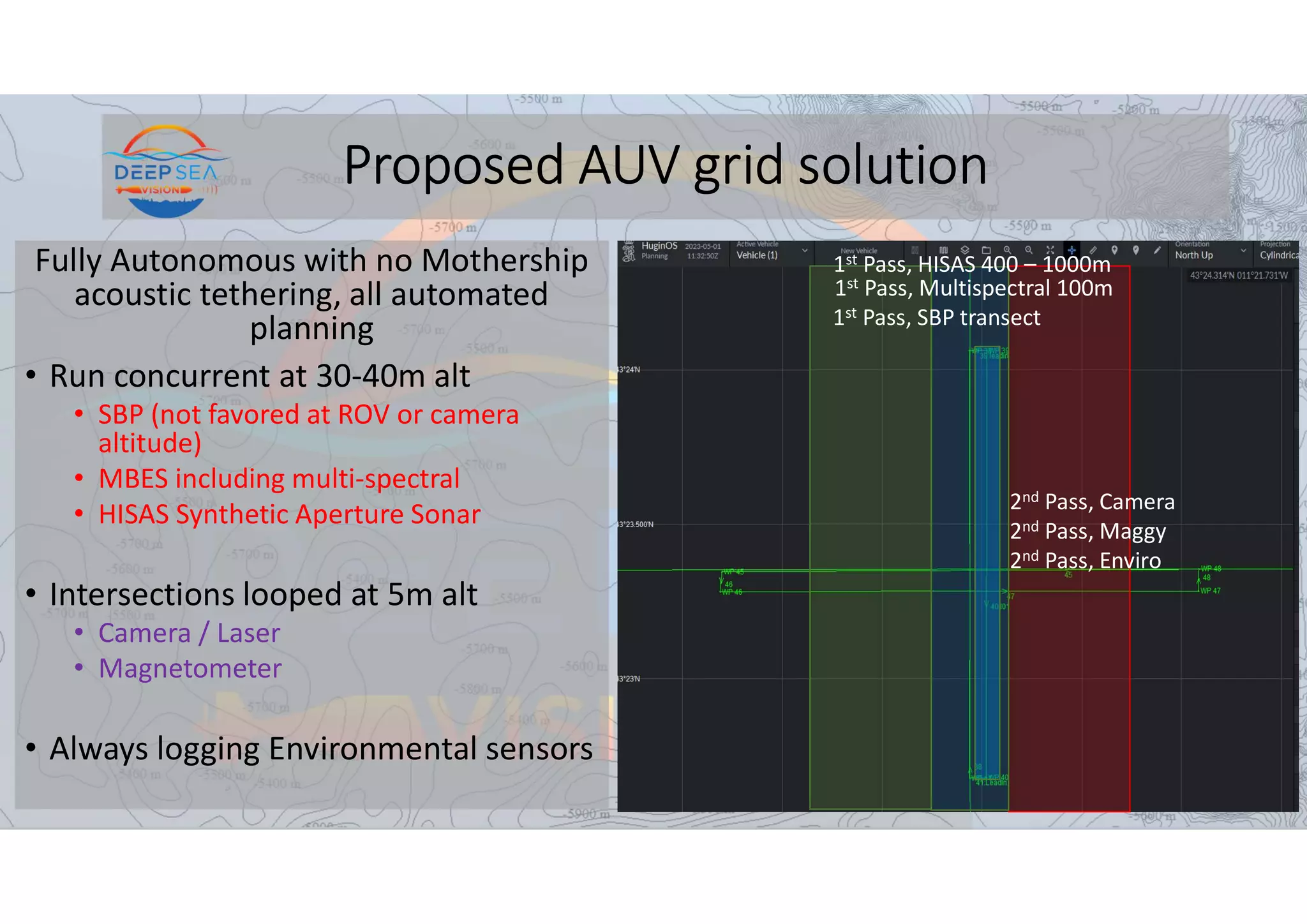
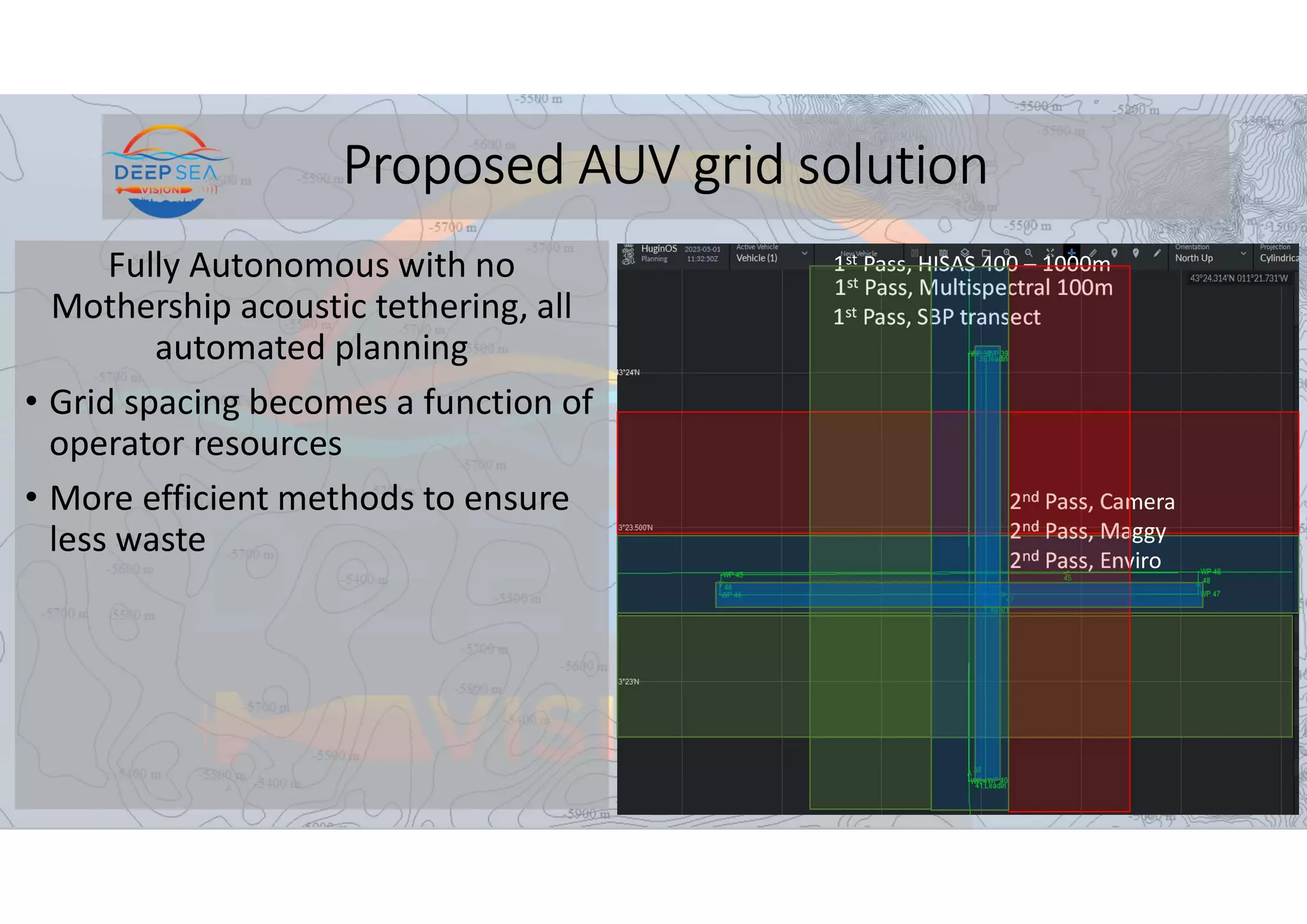
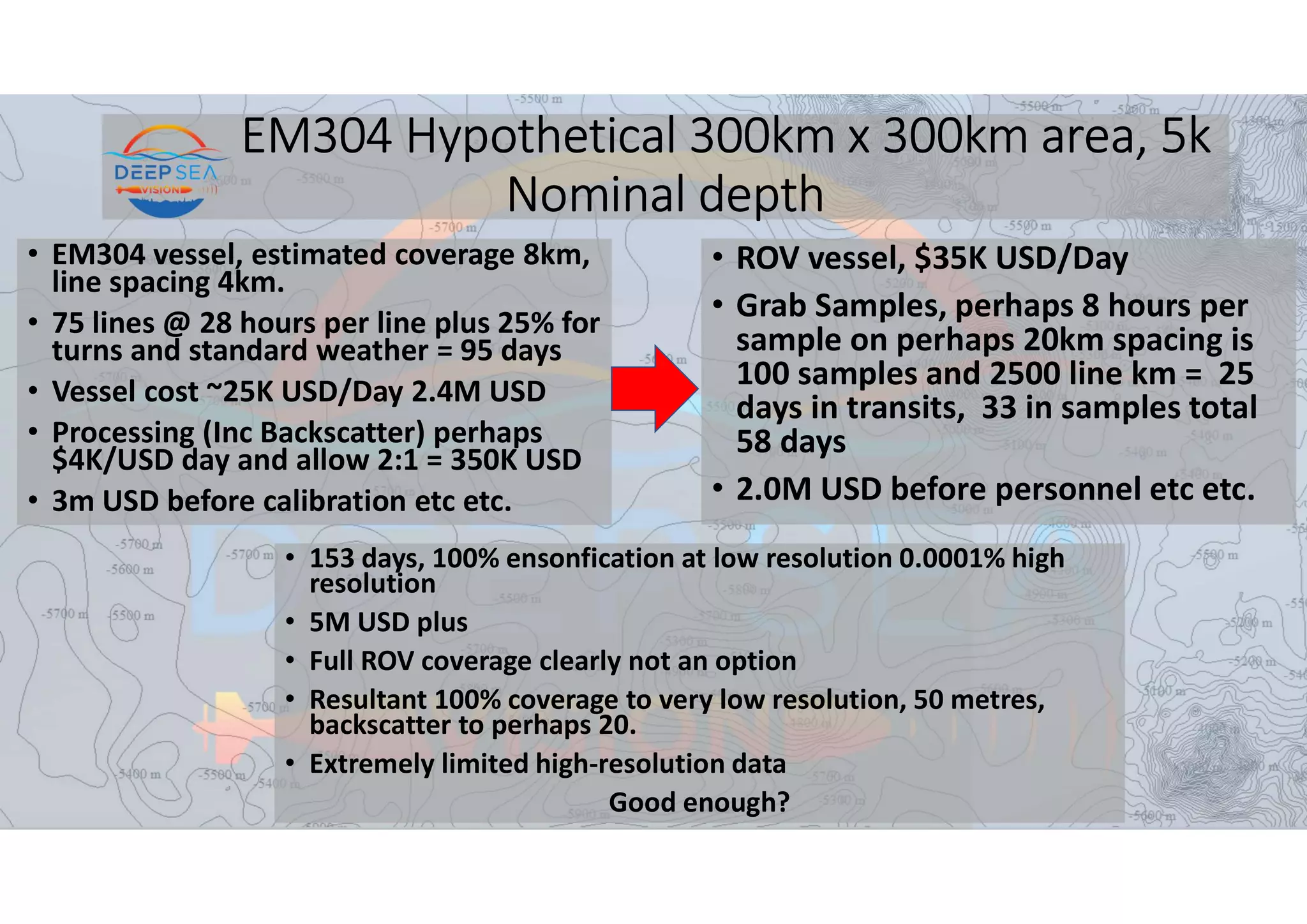
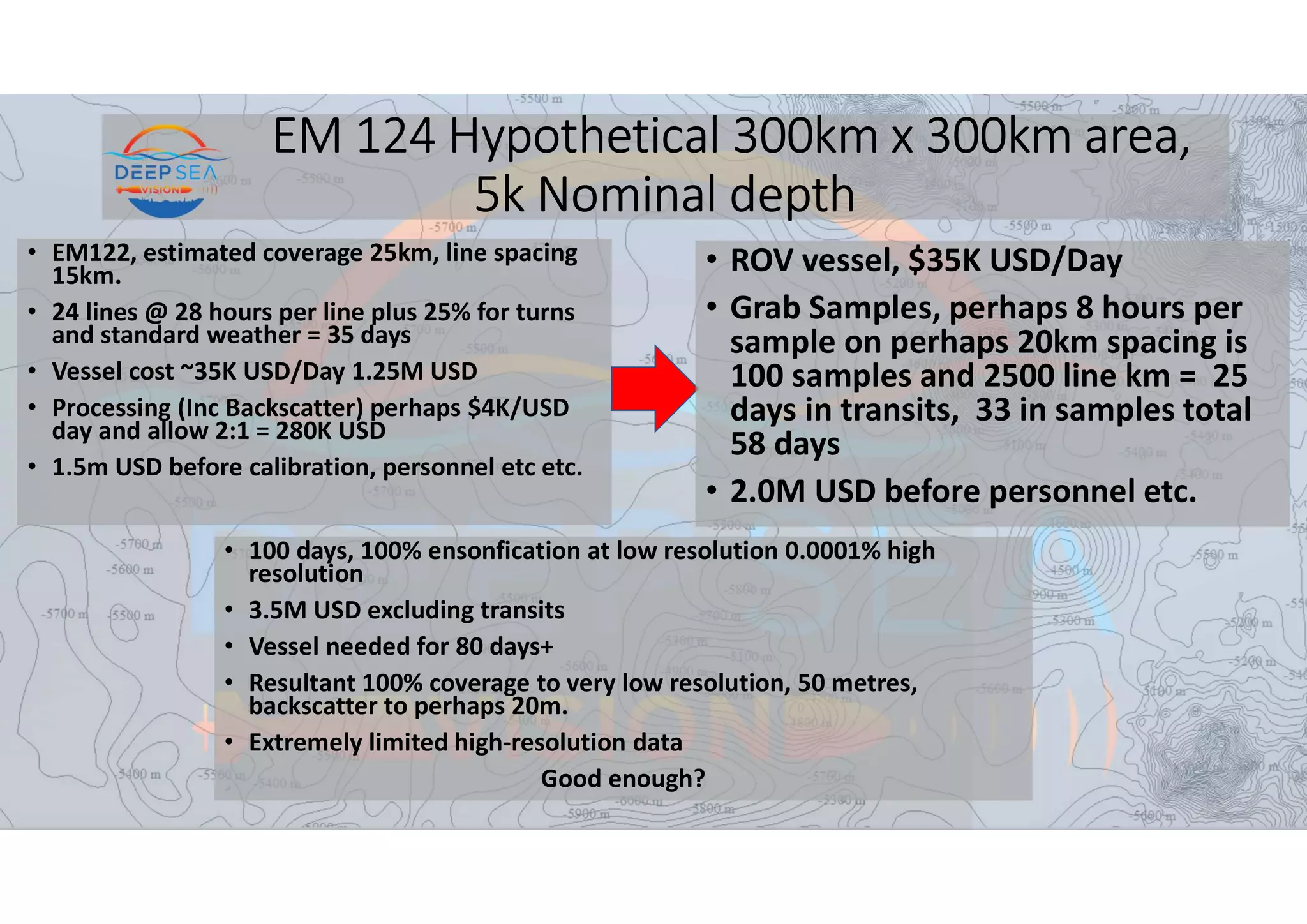
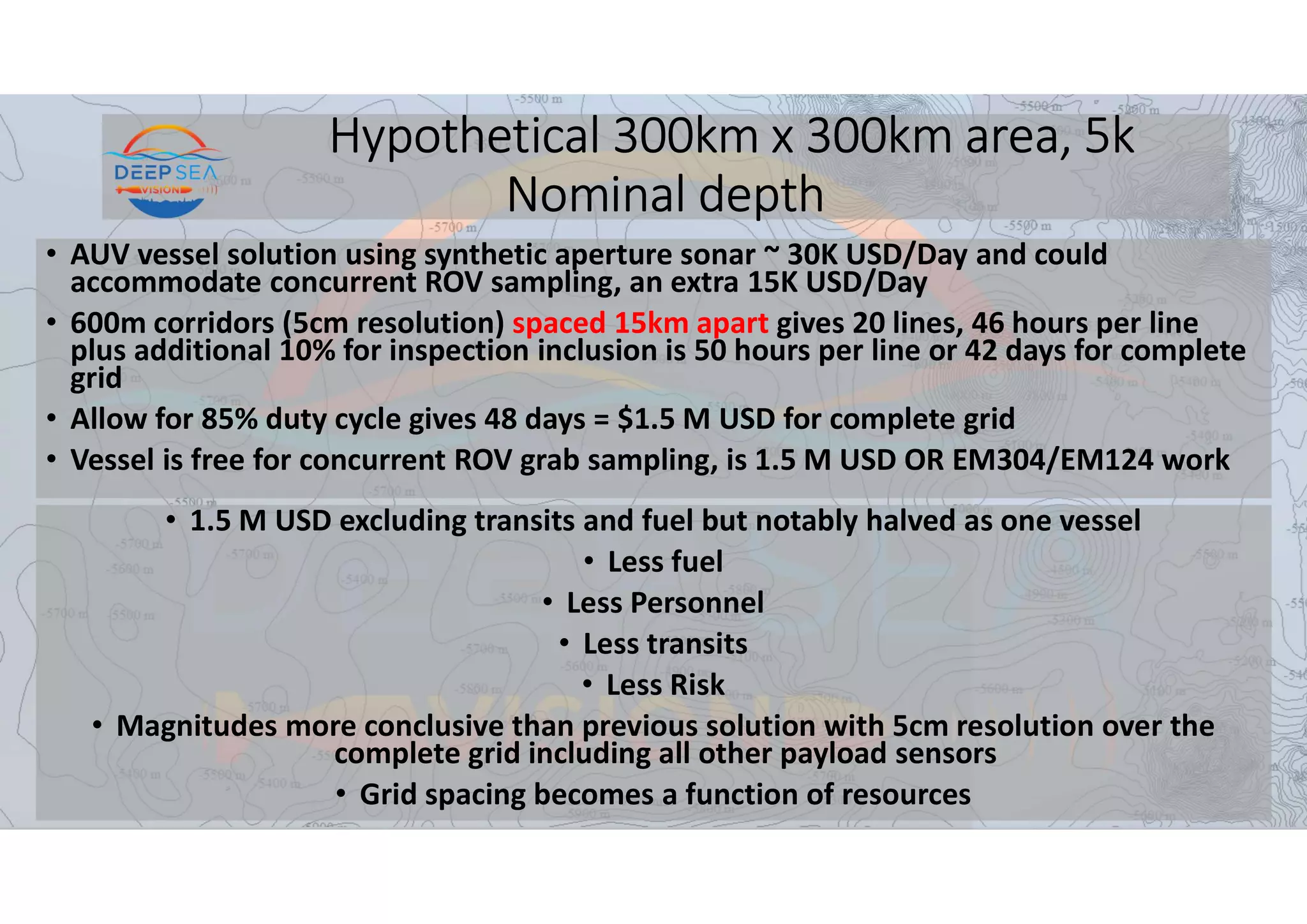
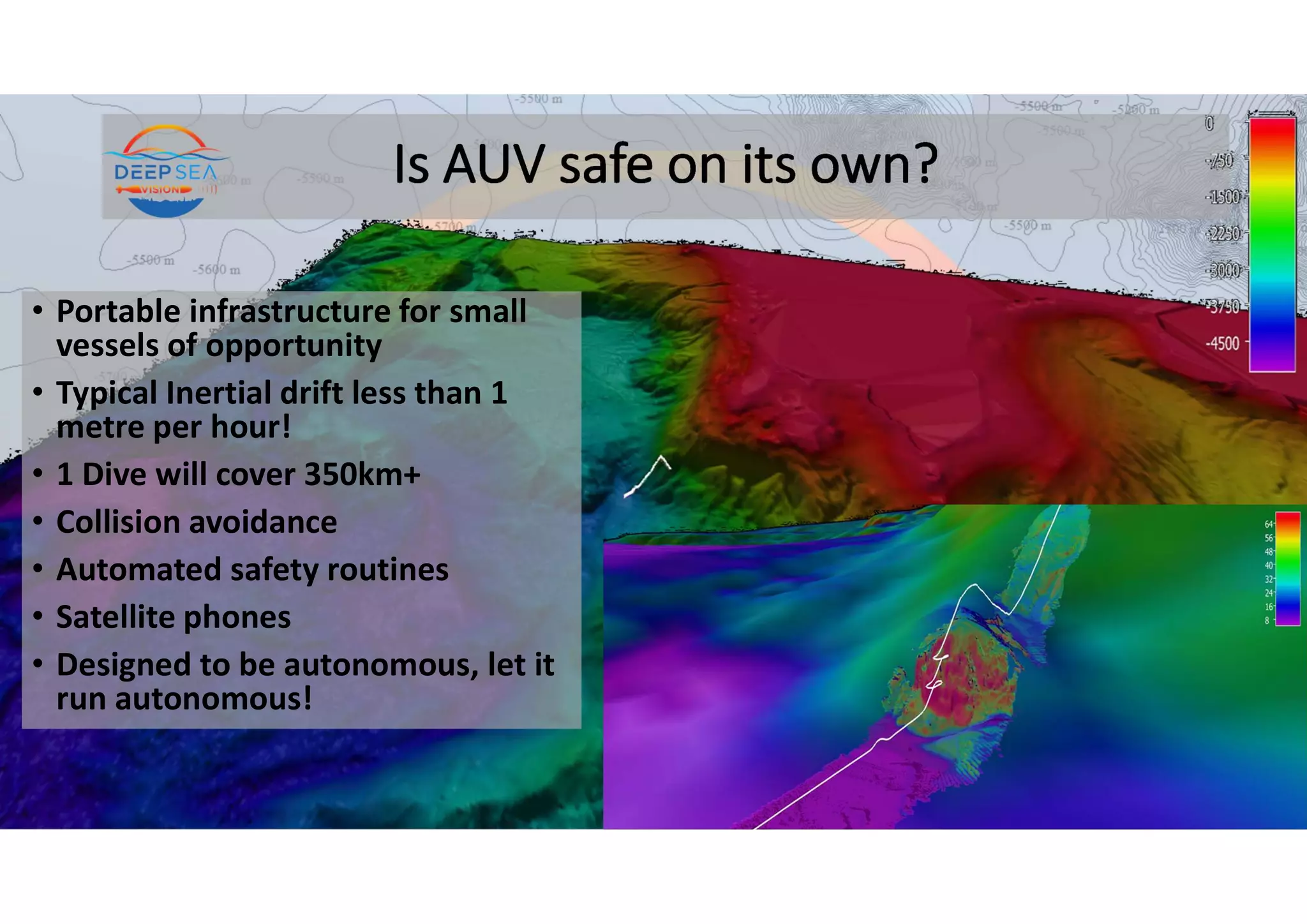
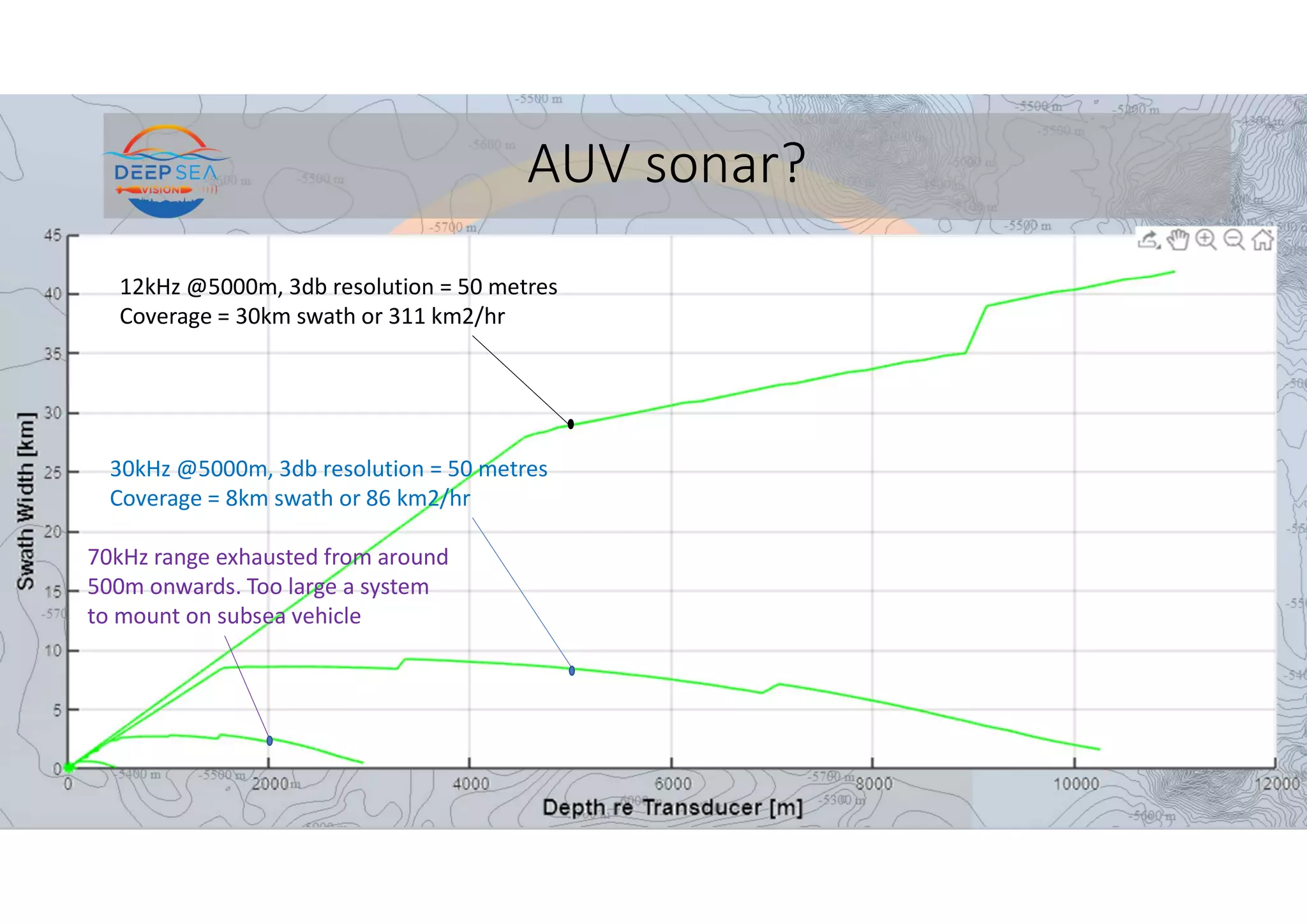
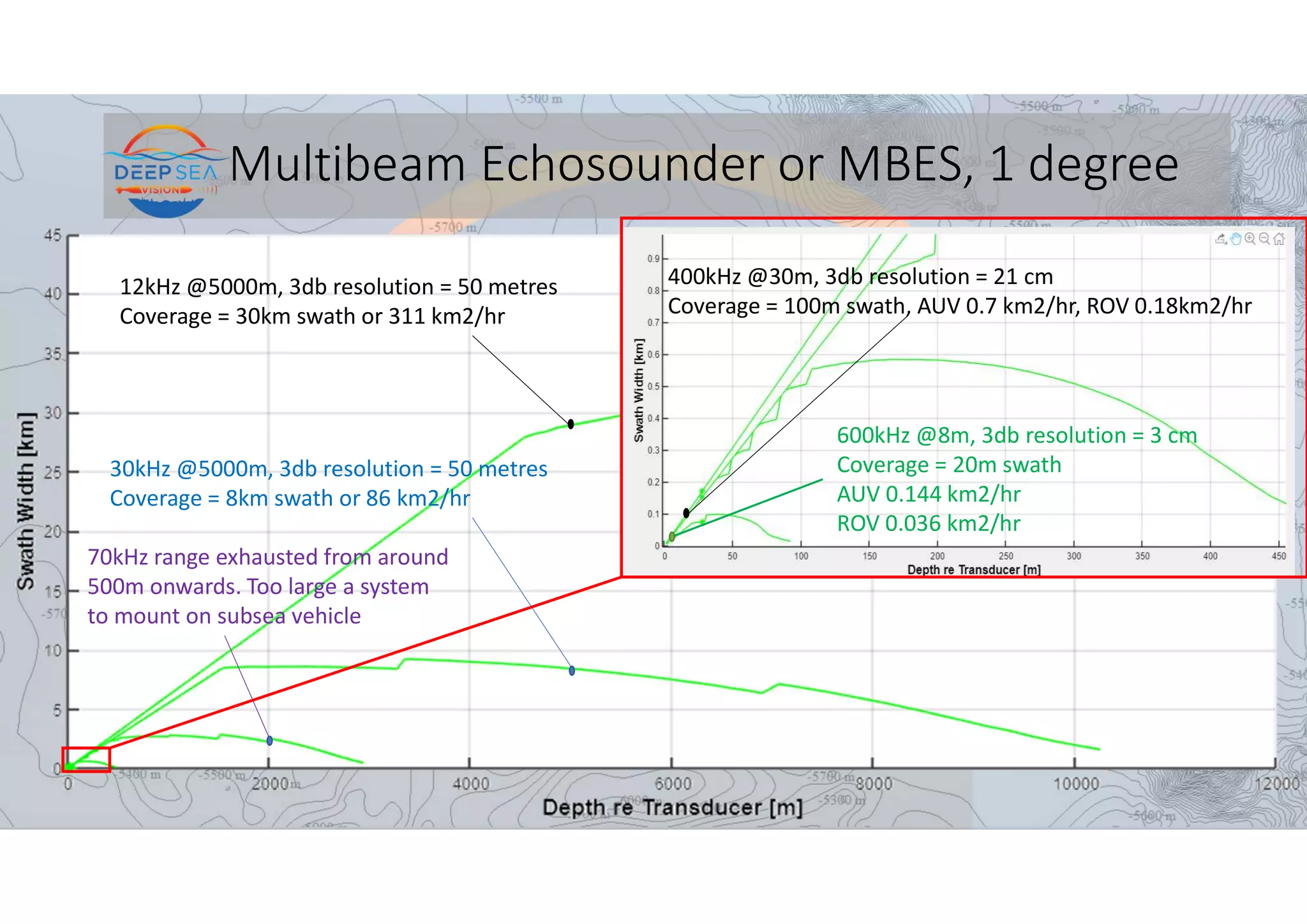
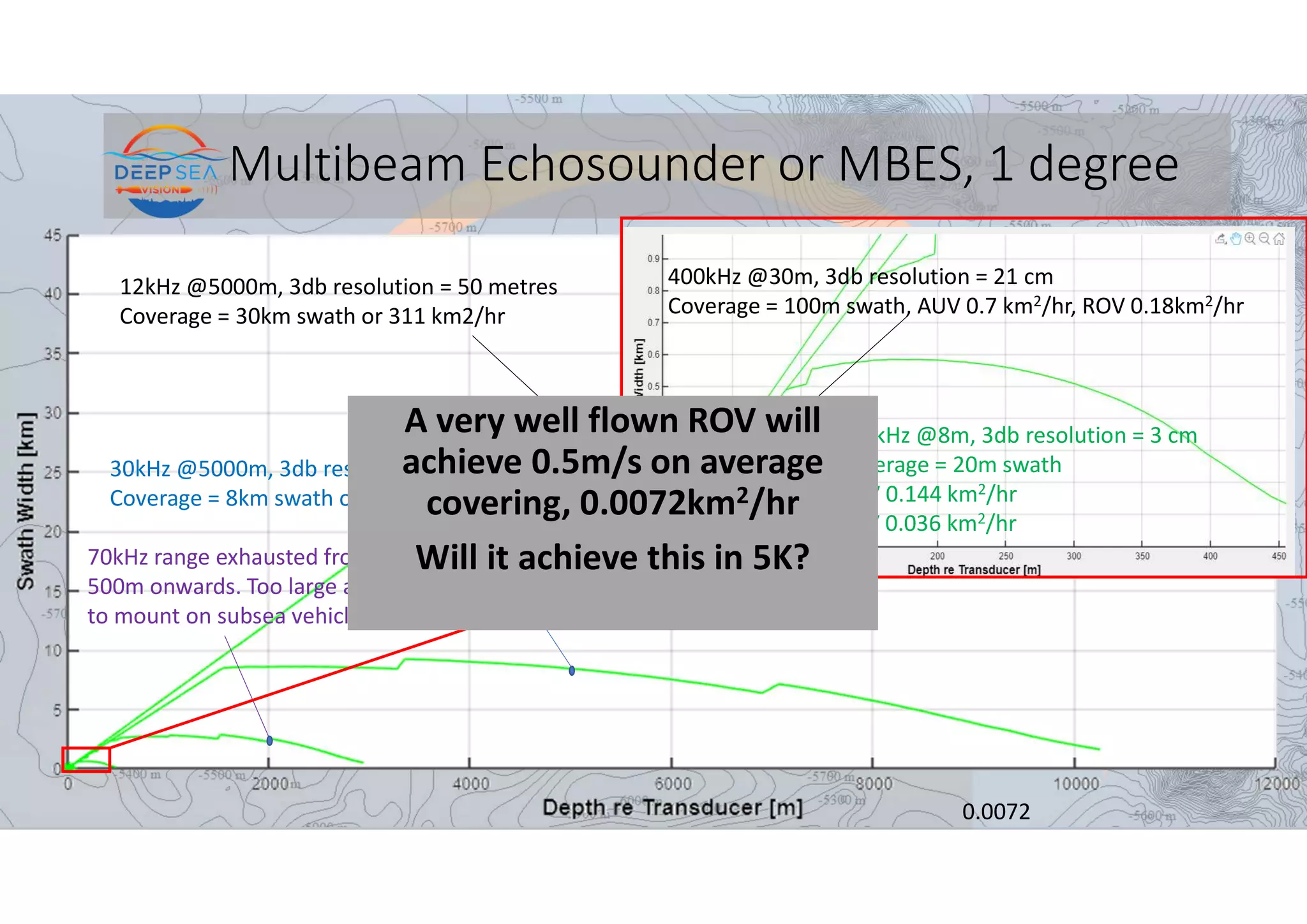
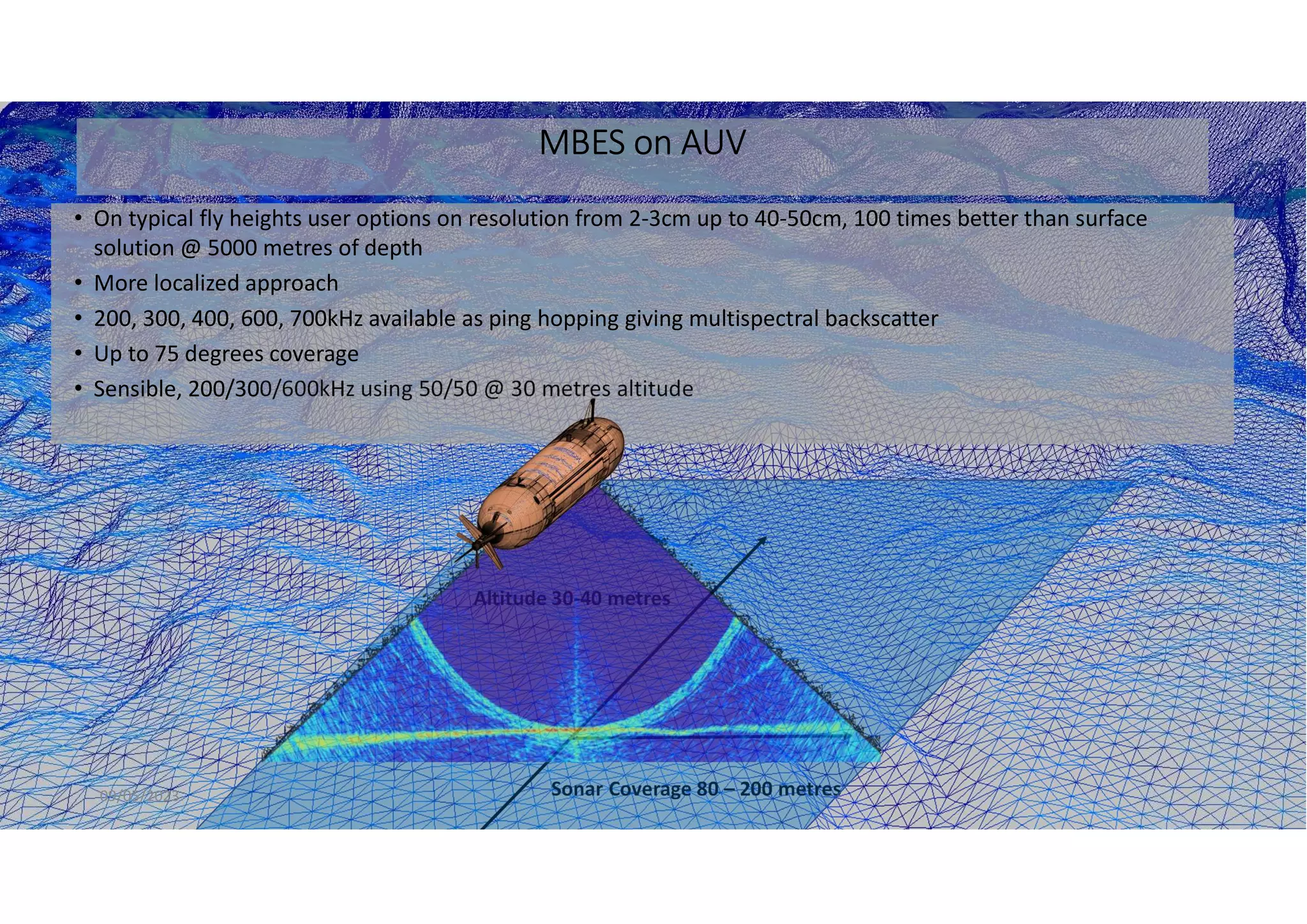
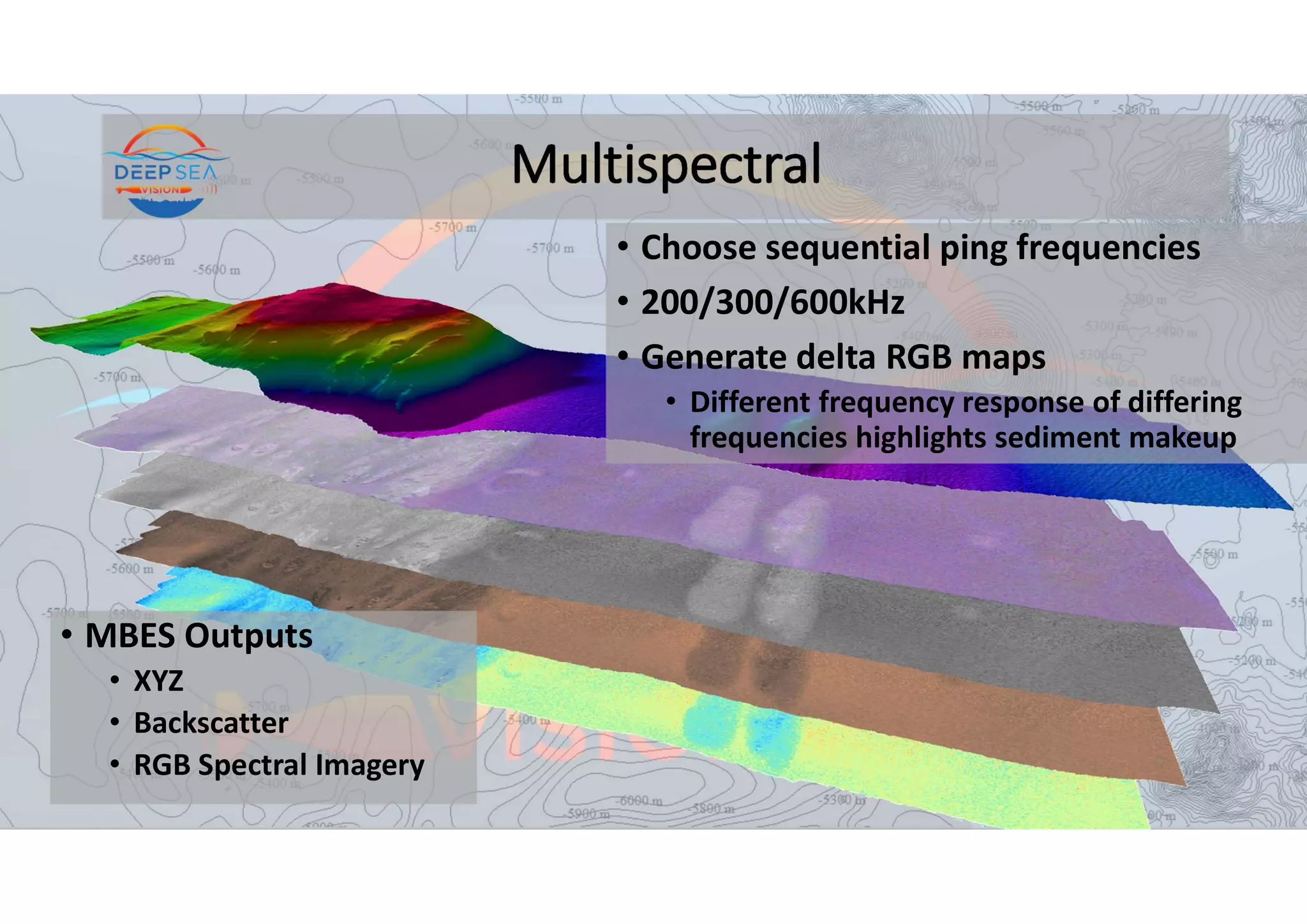
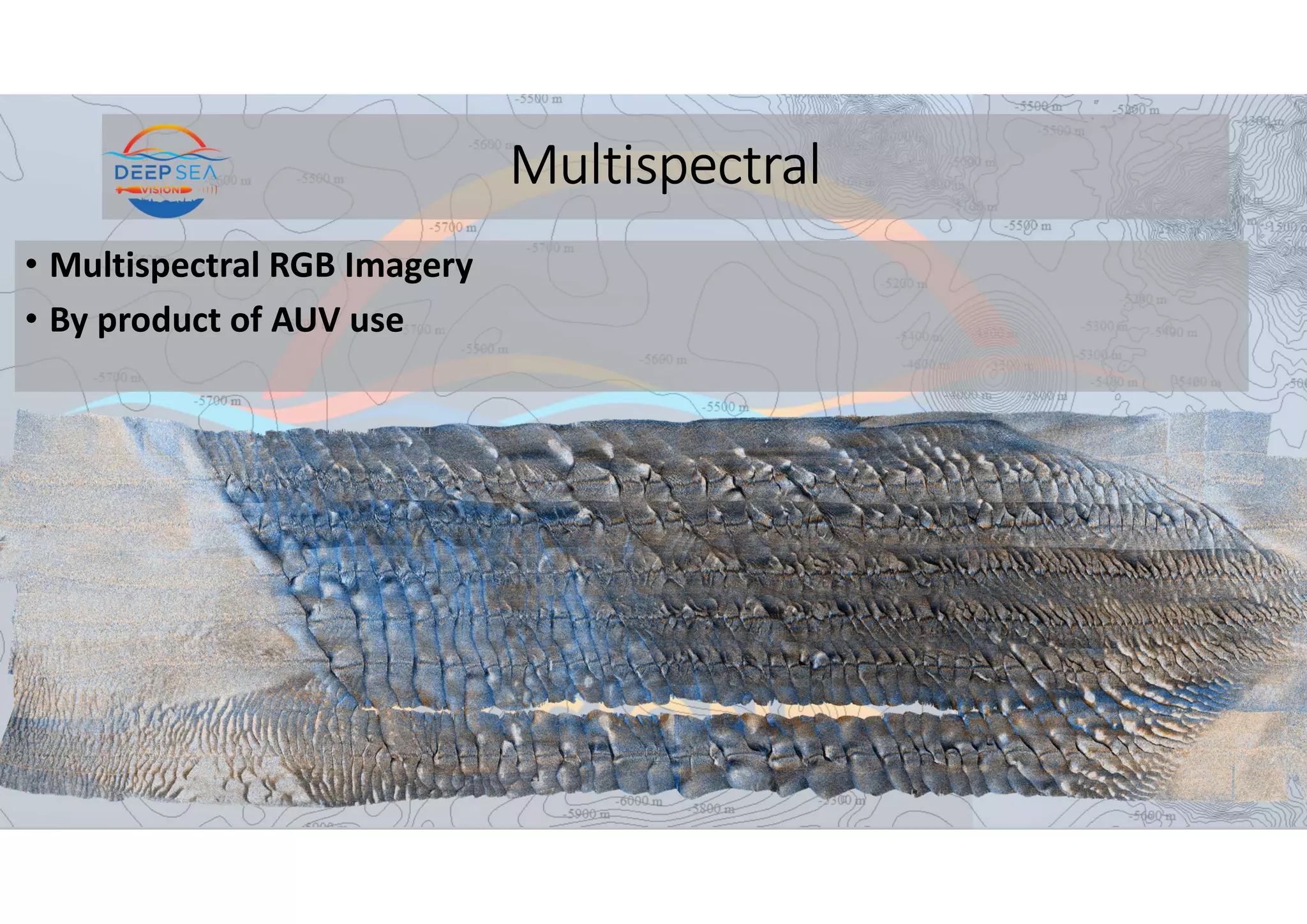
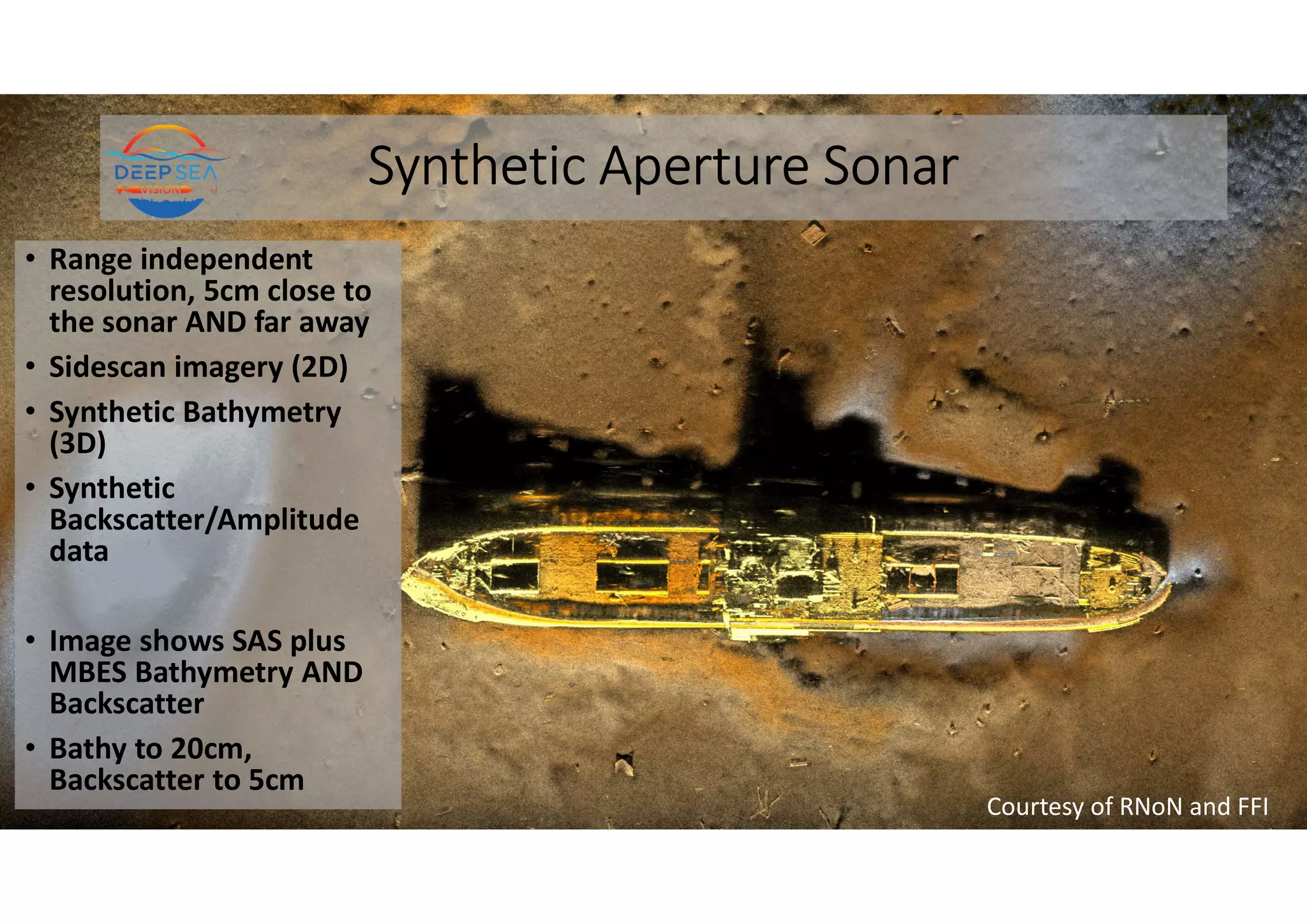
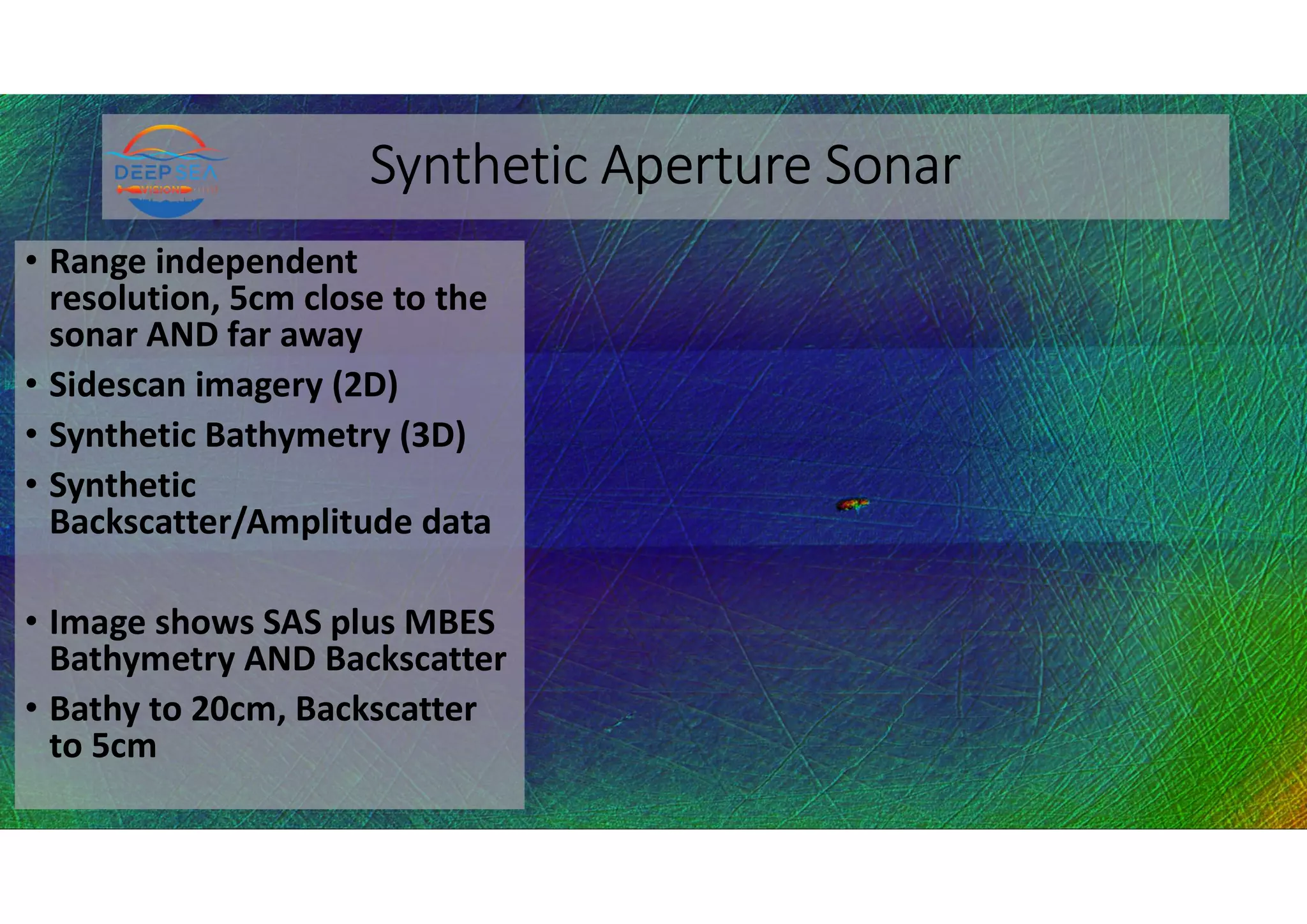
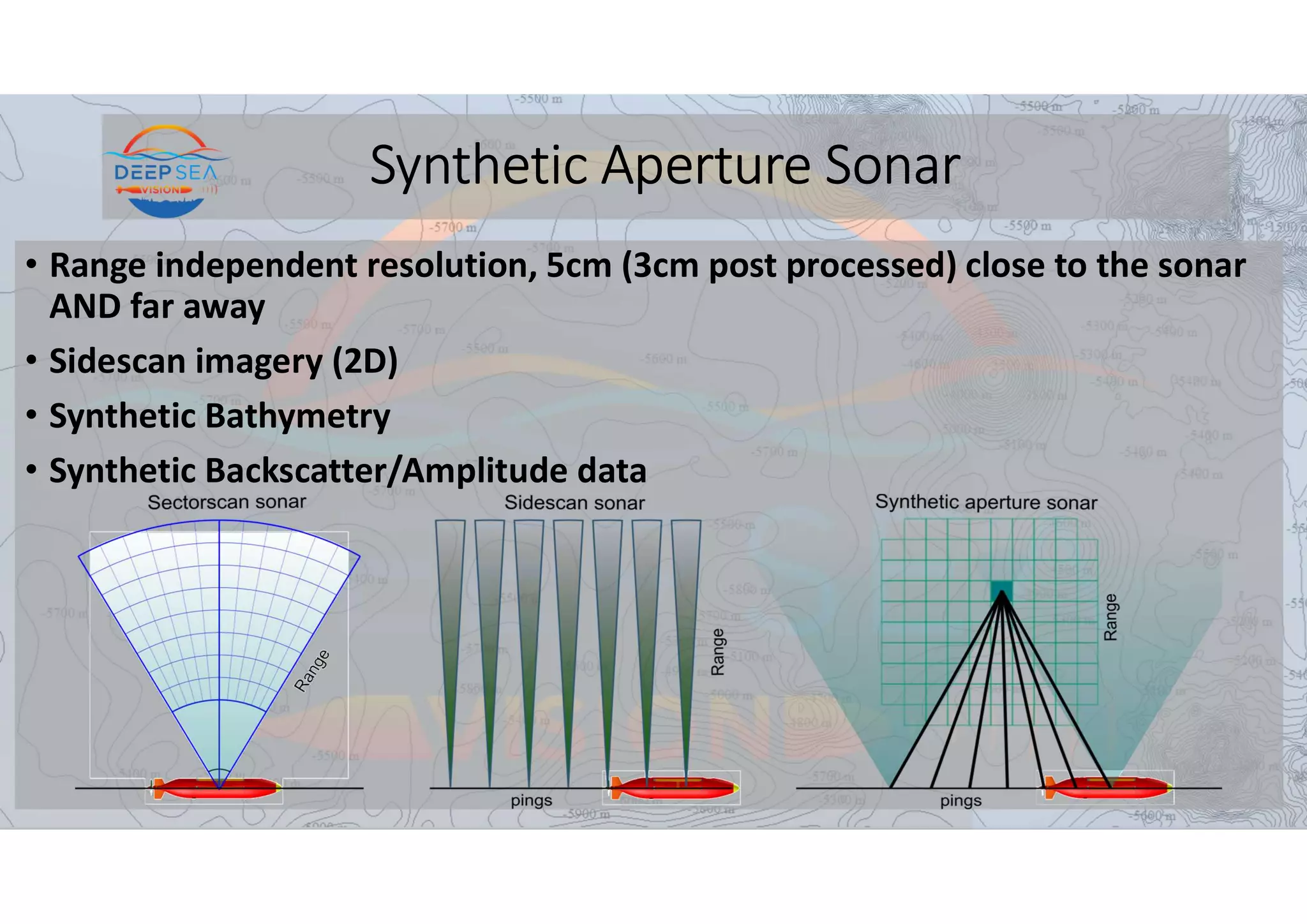
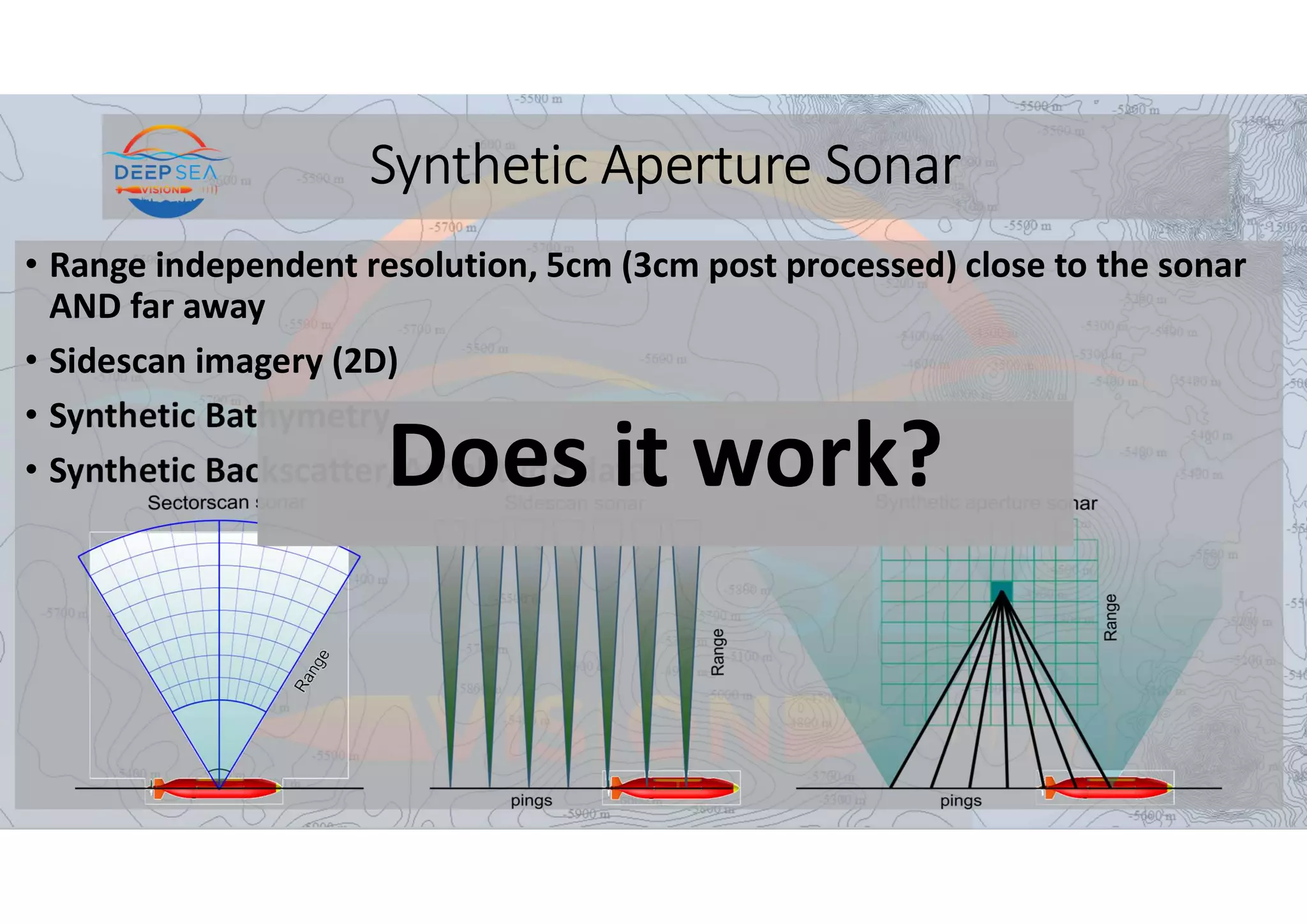
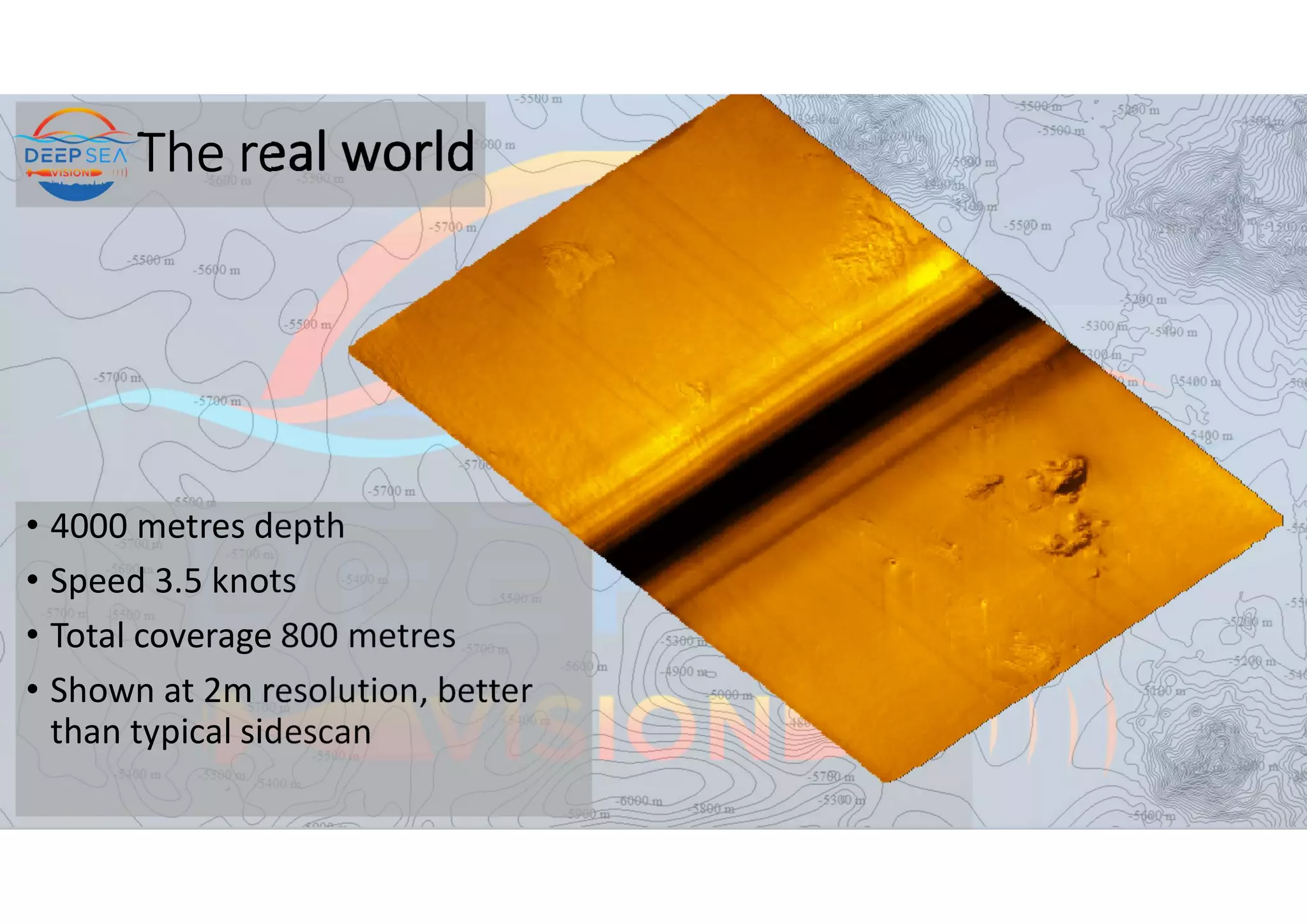
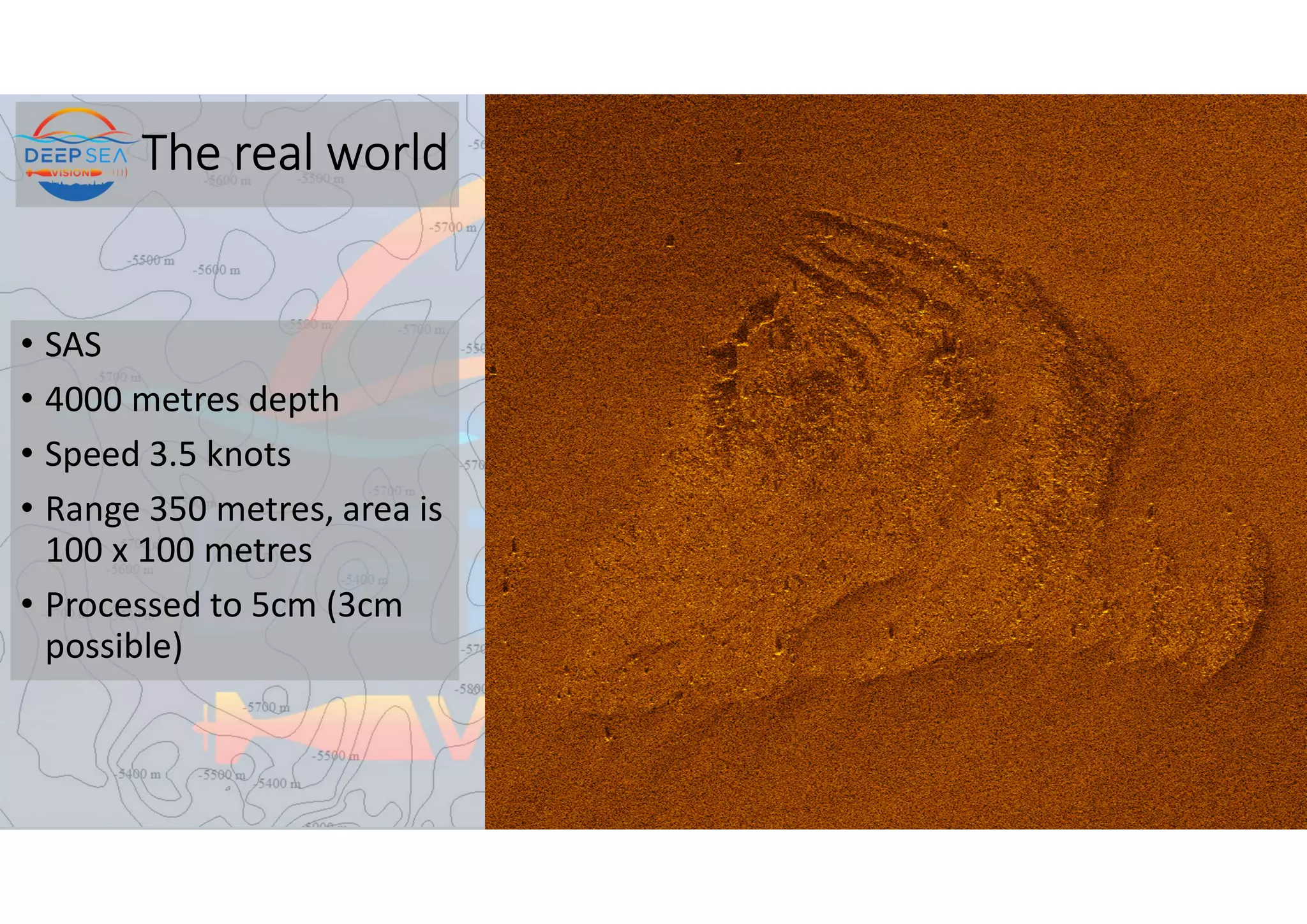
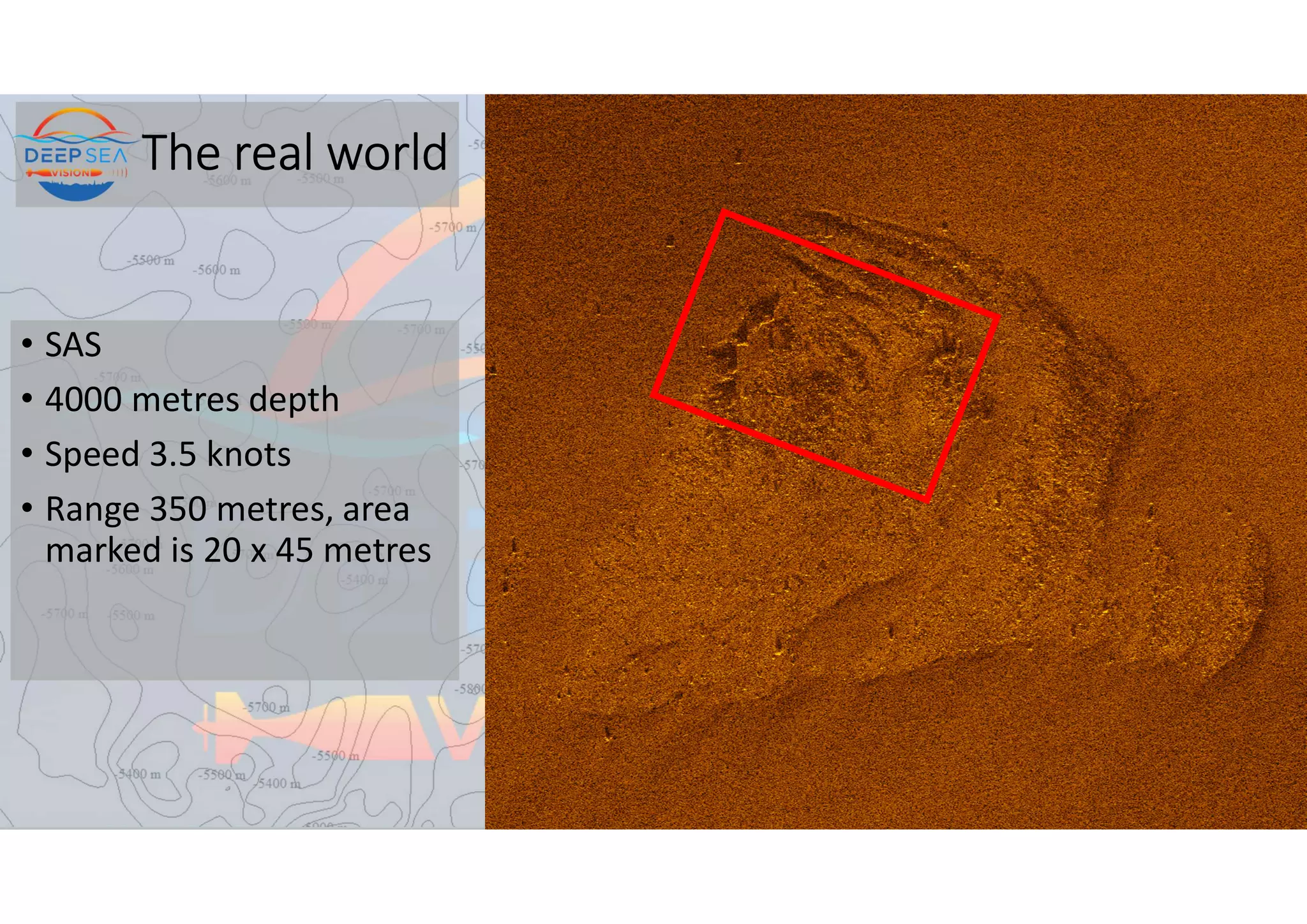
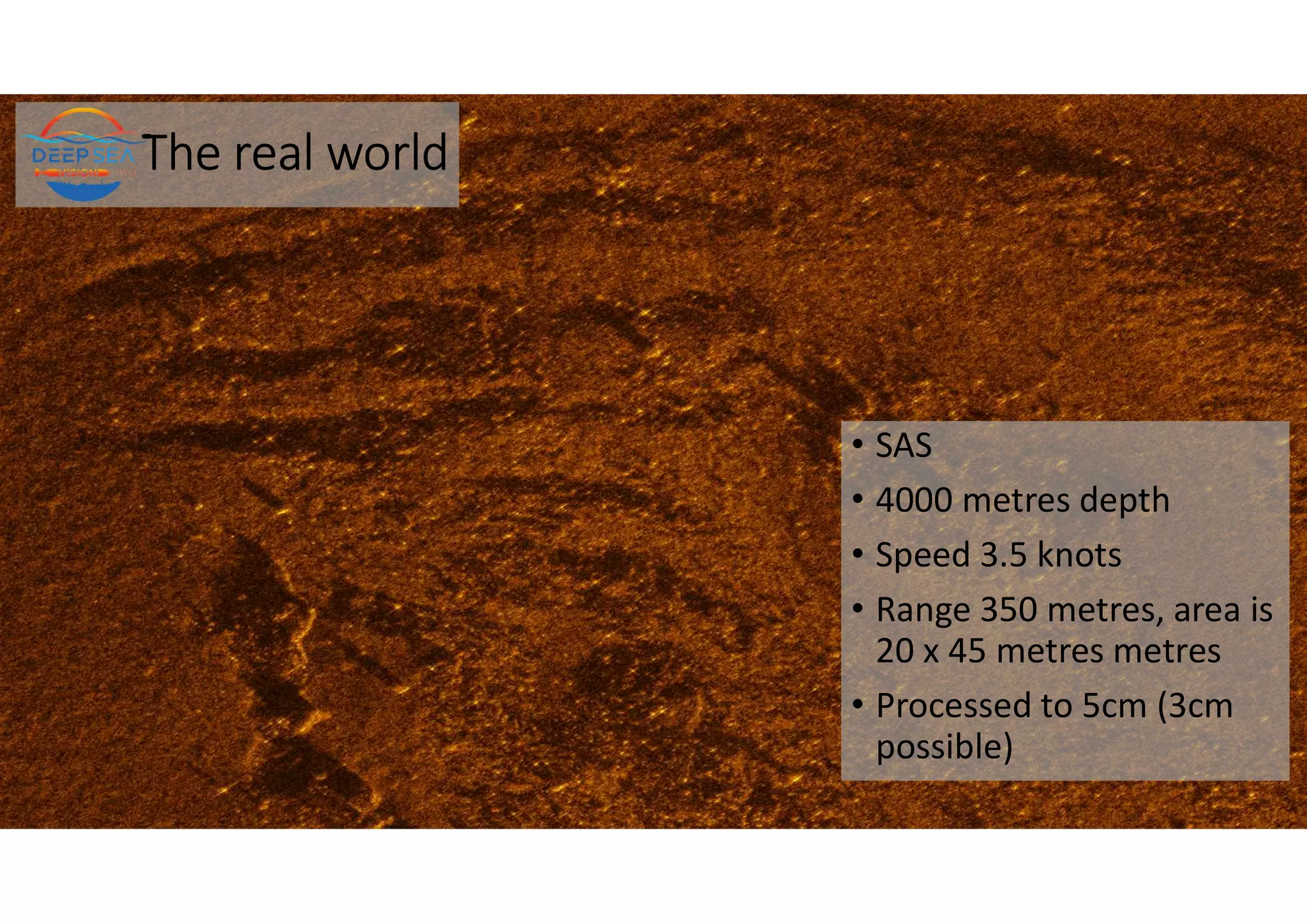
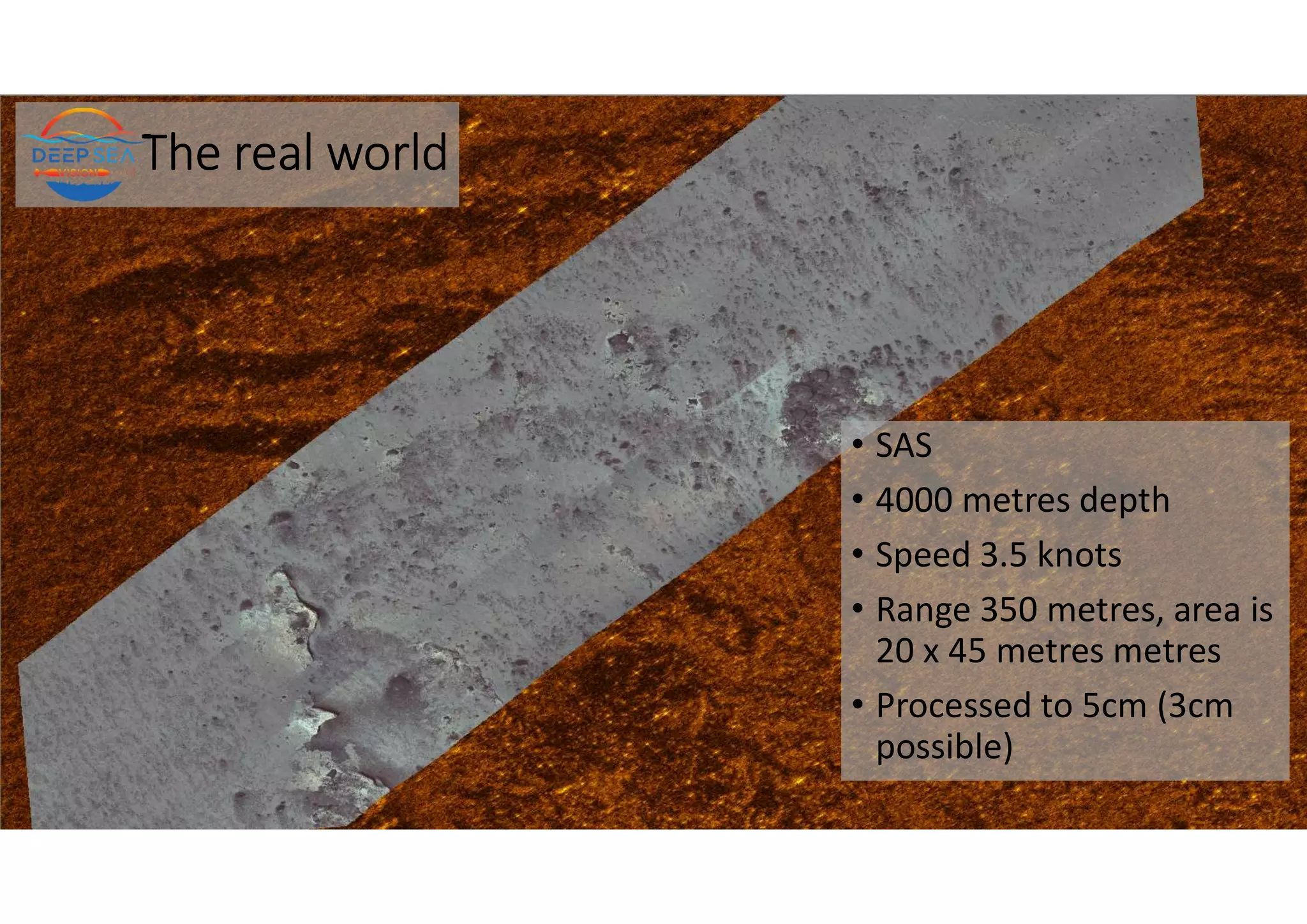
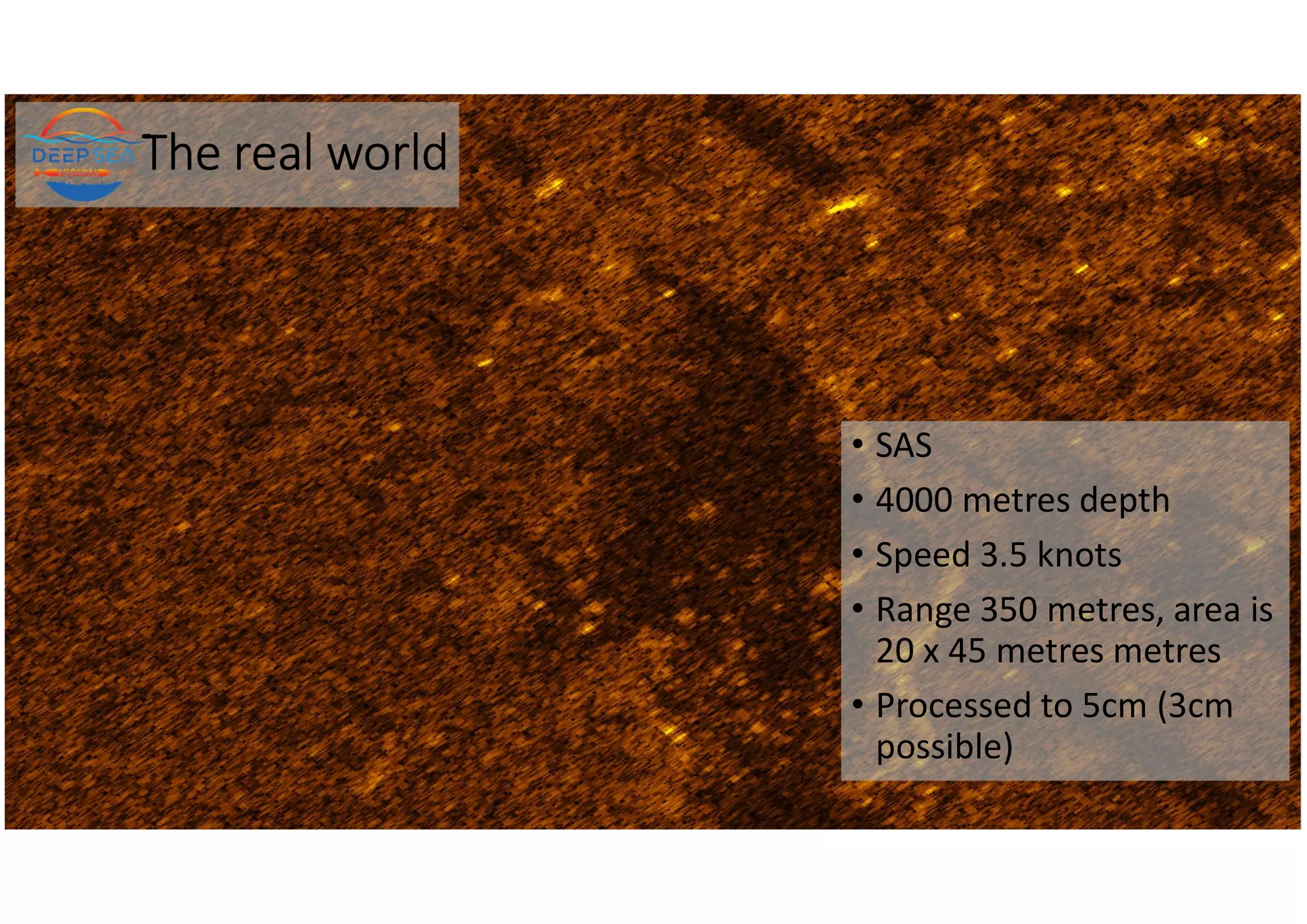
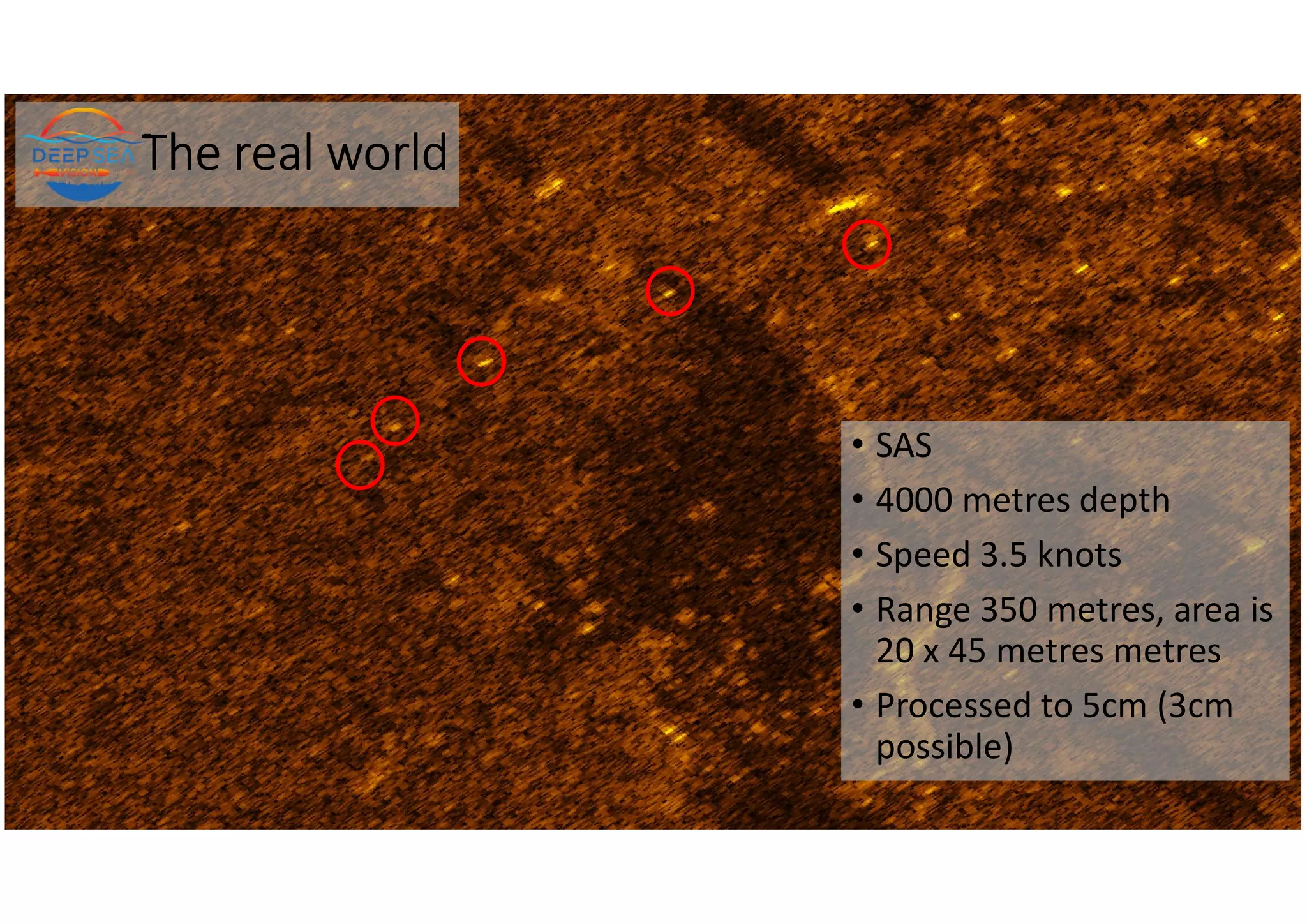
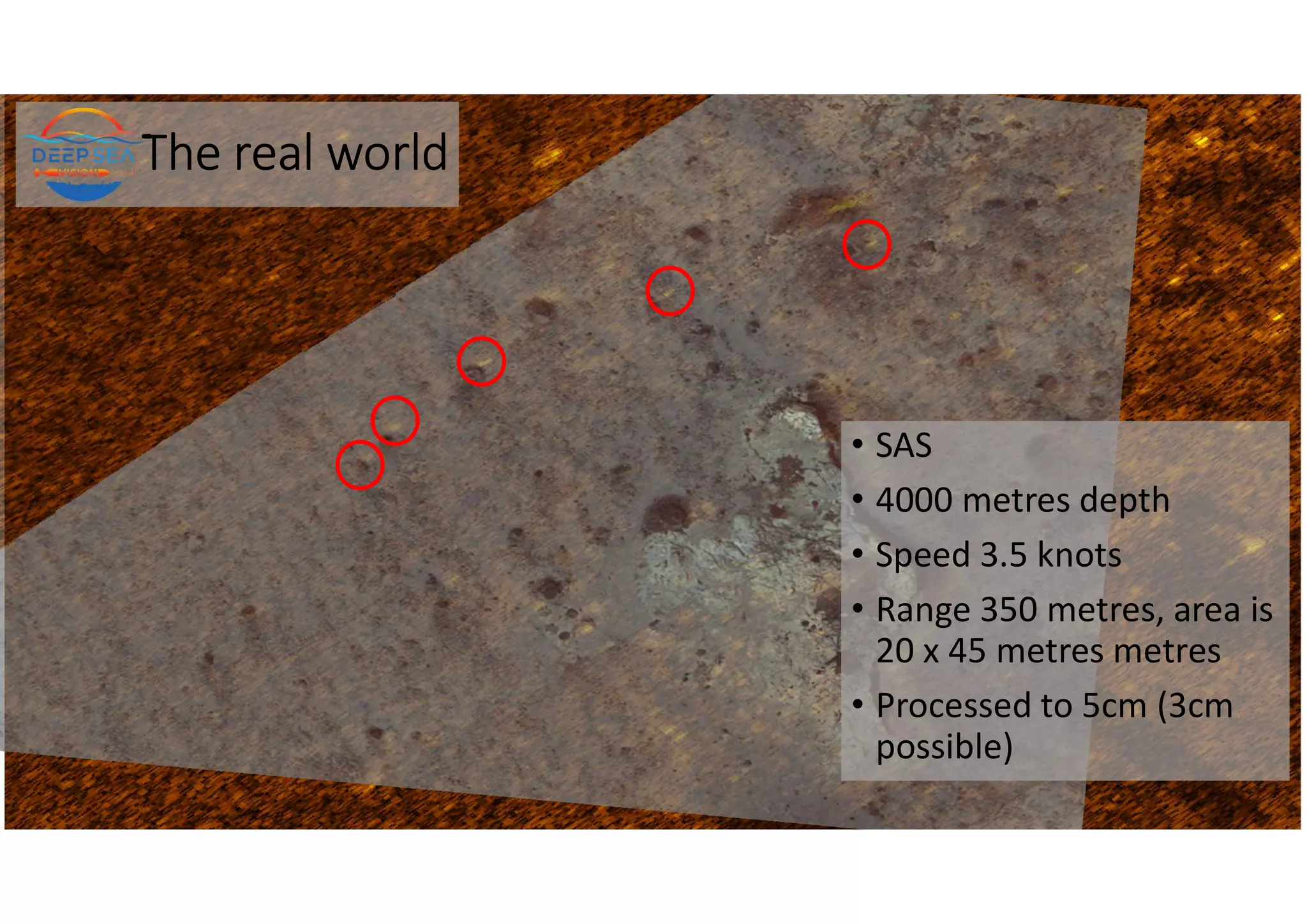
This document provides an overview of mapping technologies for deep sea mineral exploration, including multibeam echosounders (MBES), autonomous underwater vehicles (AUVs), and remotely operated vehicles (ROVs). It discusses the tradeoffs between different sensor resolutions and coverage rates. It proposes using an AUV grid survey approach with high-resolution MBES and synthetic aperture sonar to efficiently map large deep sea areas, followed by targeted ROV sampling as needed. This approach could provide comprehensive mapping at lower overall cost than traditional surface vessel surveys alone.