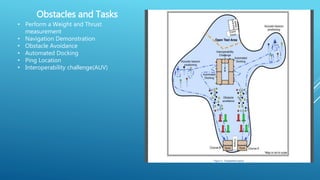
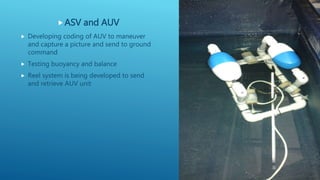
The document describes an autonomous surface vehicle (ASV) project that is developing an unmanned boat. The ASV uses ultrasonic sensors, LIDAR, GPS, and a camera to navigate and perform tasks without human operation. It will be tested to demonstrate navigation, obstacle avoidance, automated docking, and locating pingers. Infrastructure was developed to test the sensors and thrusters on the ASV using a grid in a pool. The project is also working on coding an autonomous underwater vehicle (AUV) to take pictures and communicate with the surface team. Algorithms are being developed to control the ASV's operations.