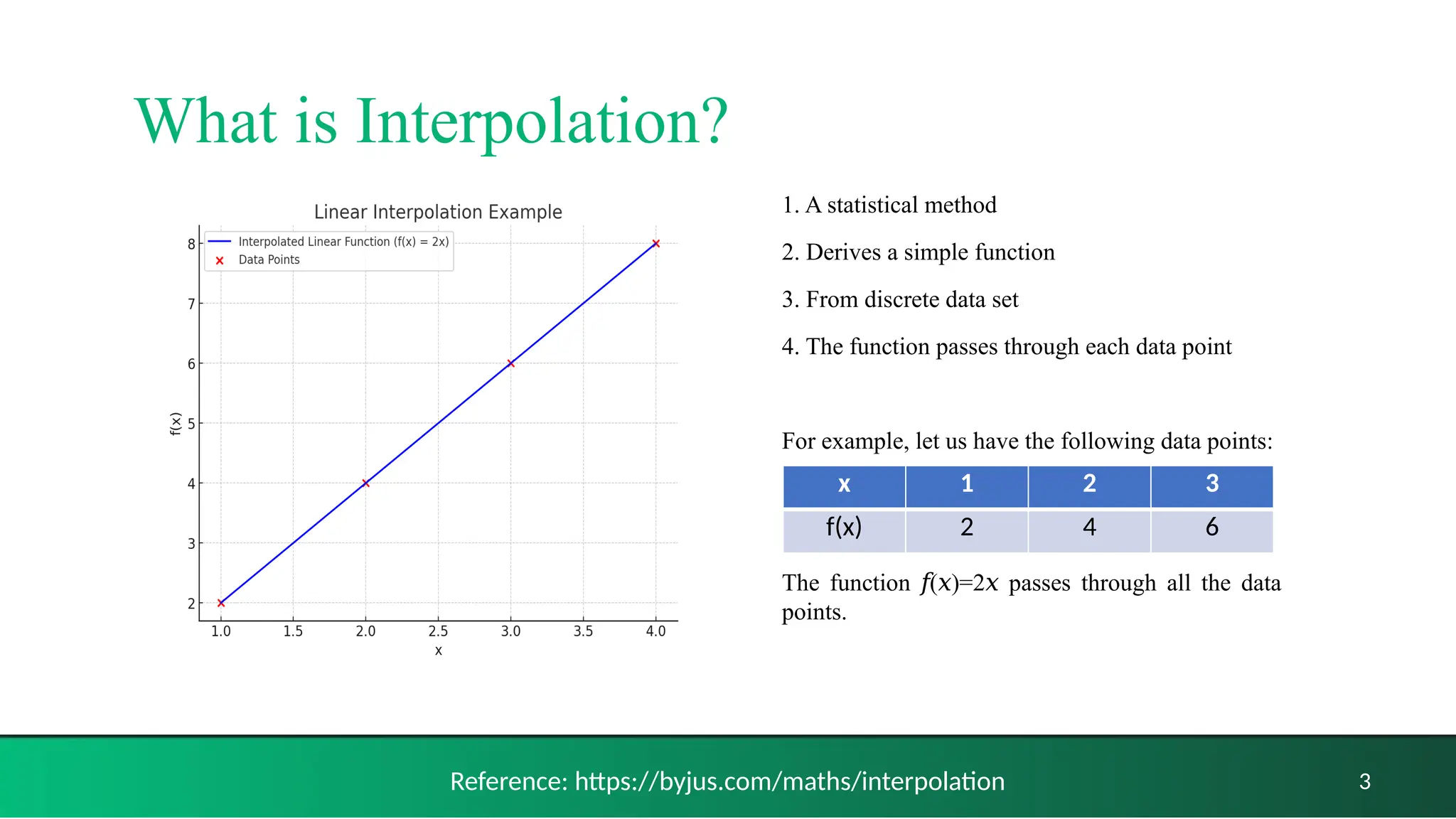
The document discusses various interpolation methods utilized in mathematics and computer graphics, including linear, polynomial, Lagrange, Hermitian, and spline interpolation. It details how these methods derive functions from discrete data points to create smooth transitions in graphics applications such as image scaling, rotation, and morphing. Overall, the document covers the advantages and limitations of interpolation techniques while providing examples and formulas for each type.
![Linear Spline Interpolation
11
A linear spline connects adjacent data points with straight lines. Between two consecutive
points (xi,yi) and (xi+1,yi+1), the function is linear, and its formula is:
Where i=1,2,…,n−1 and the spline function Si(x) is valid for x [xi,xi+1].
∈
Reference: https://slidetodoc.com/chapter-16-curve-fitting-splines-spline-interpolation-z/](https://image.slidesharecdn.com/ashikj-241117175858-3f485536/75/AShikj-pptx-Image-Tampering-Detectionjl-bbbbbb-11-2048.jpg)
![Quadratic Spline Interpolation
12
1. Uses second-degree polynomials
2. Formula: [for interval (xi, xi+1)]
3. S(x) and S’(x) are continuous across interval.
4. The second derivative is not continuous.
Reference: https://slidetodoc.com/chapter-16-curve-fitting-splines-spline-interpolation-z/](https://image.slidesharecdn.com/ashikj-241117175858-3f485536/75/AShikj-pptx-Image-Tampering-Detectionjl-bbbbbb-12-2048.jpg)
![Cubic Spline Interpolation
13
1. Uses third-degree polynomials
2. Formula: [for interval (xi, xi+1)]
3. The first and second derivatives are continuous across all intervals.
Reference: https://slidetodoc.com/chapter-16-curve-fitting-splines-spline-interpolation-z/](https://image.slidesharecdn.com/ashikj-241117175858-3f485536/75/AShikj-pptx-Image-Tampering-Detectionjl-bbbbbb-13-2048.jpg)

![References
[1] Schaum's Outline of Computer Graphics by Zhigang Xiang.
[2] https://byjus.com/maths/interpolation
[3] https://copilot.microsoft.com/images/create?msockid=14d5b680168567bc2d10a394178466bb
[4] https://slidetodoc.com/chapter-16-curve-fitting-splines-spline-interpolation-z/
17](https://image.slidesharecdn.com/ashikj-241117175858-3f485536/75/AShikj-pptx-Image-Tampering-Detectionjl-bbbbbb-17-2048.jpg)




























![Seller Deck - Presentation [Concert L2].PPTX](https://cdn.slidesharecdn.com/ss_thumbnails/sellerdeck-presentationconcertl2-251219171156-24982daf-thumbnail.jpg?width=640&height=640&fit=bounds)

















