This document provides an introduction to artificial intelligence techniques for robotics. It outlines various search algorithms, heuristic and metaheuristic methods, handling uncertainties using fuzzy logic and probabilistic reasoning, and learning methods including statistical and neural network approaches. Specific techniques discussed include uninformed searches, informed searches like A* algorithm, genetic algorithms, and components of fuzzy logic like membership functions and fuzzy inference systems. The document is intended to introduce key AI concepts relevant for robotics applications.
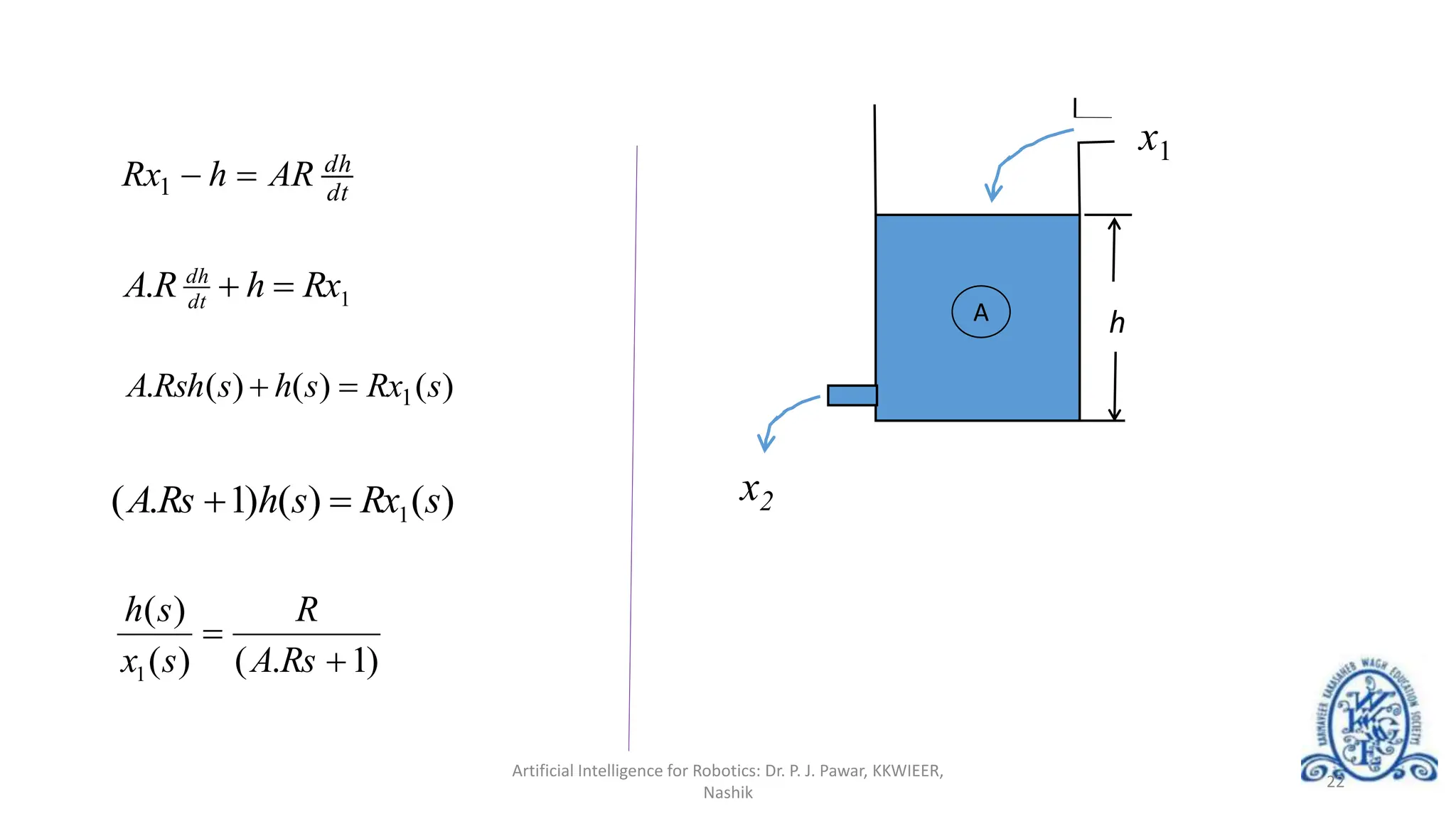
![X1
X2
A
h
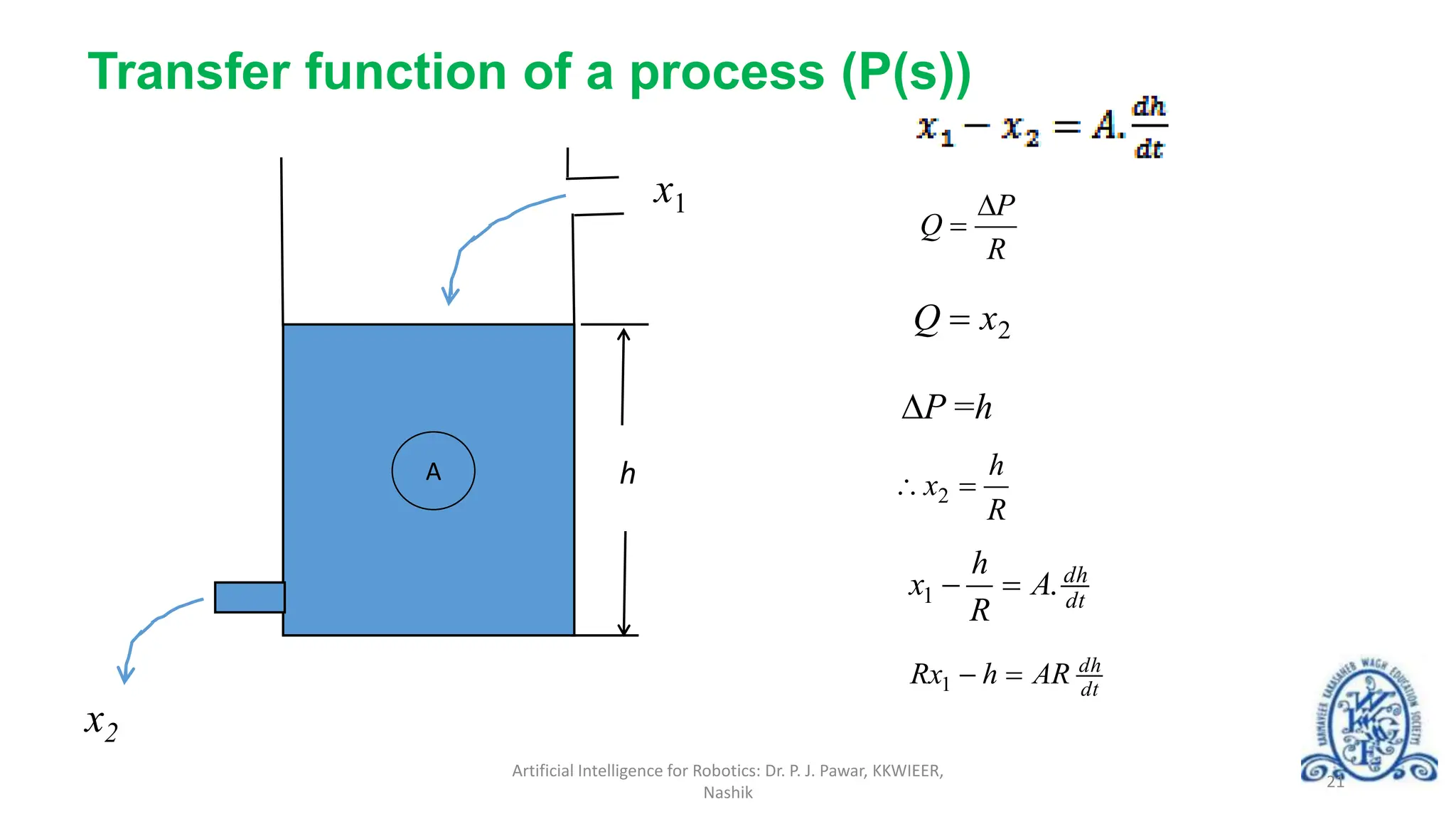
Continuous process control using Fuzzy Logic
Flow rate X1 is to be controlled to maintain constant
fluid level h
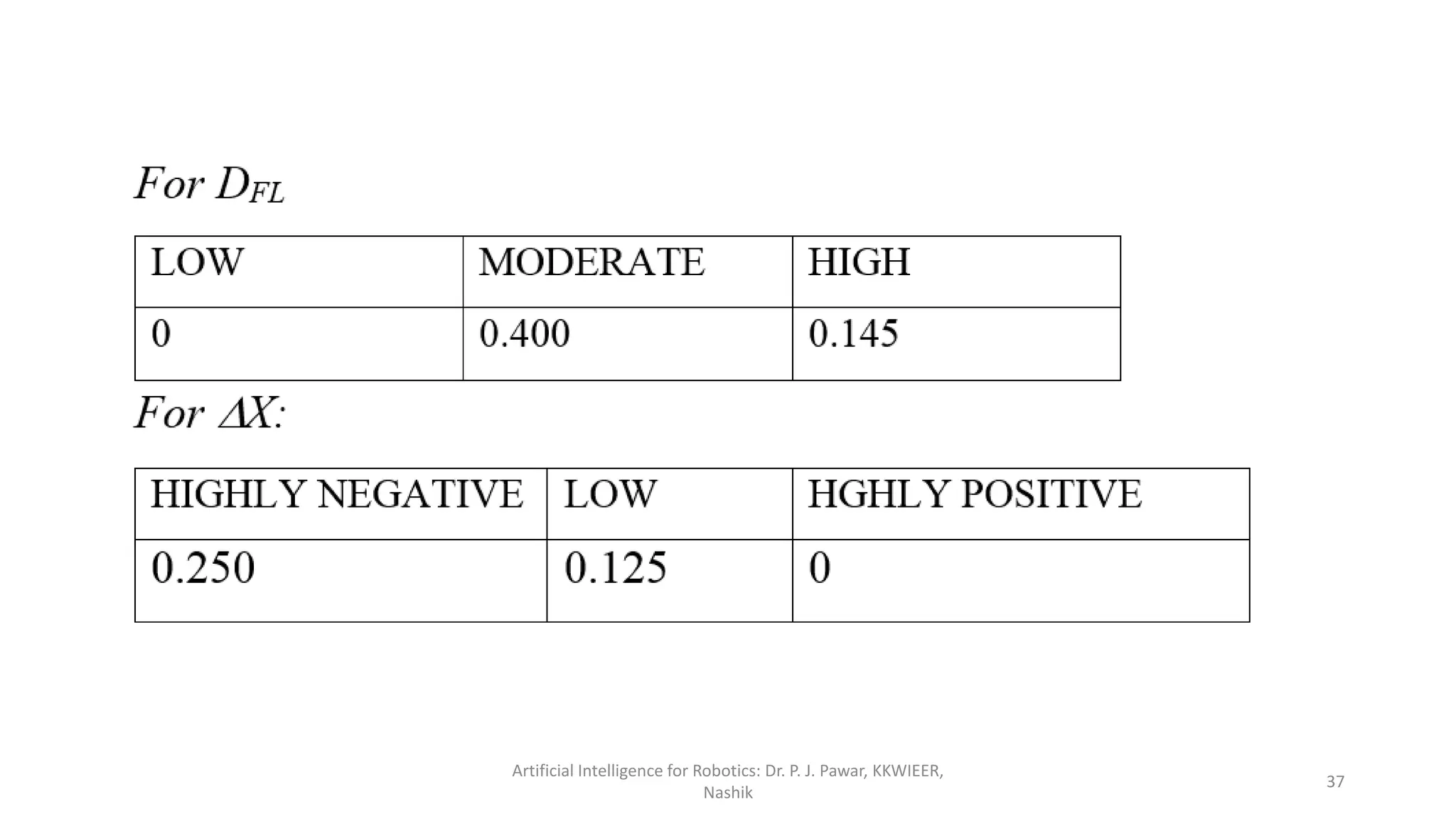
X1 depend on (i) Deviation of fluid level (DFL) from
maximum fluid level L and (ii) Difference in flow rates
(X) = X1 - X2
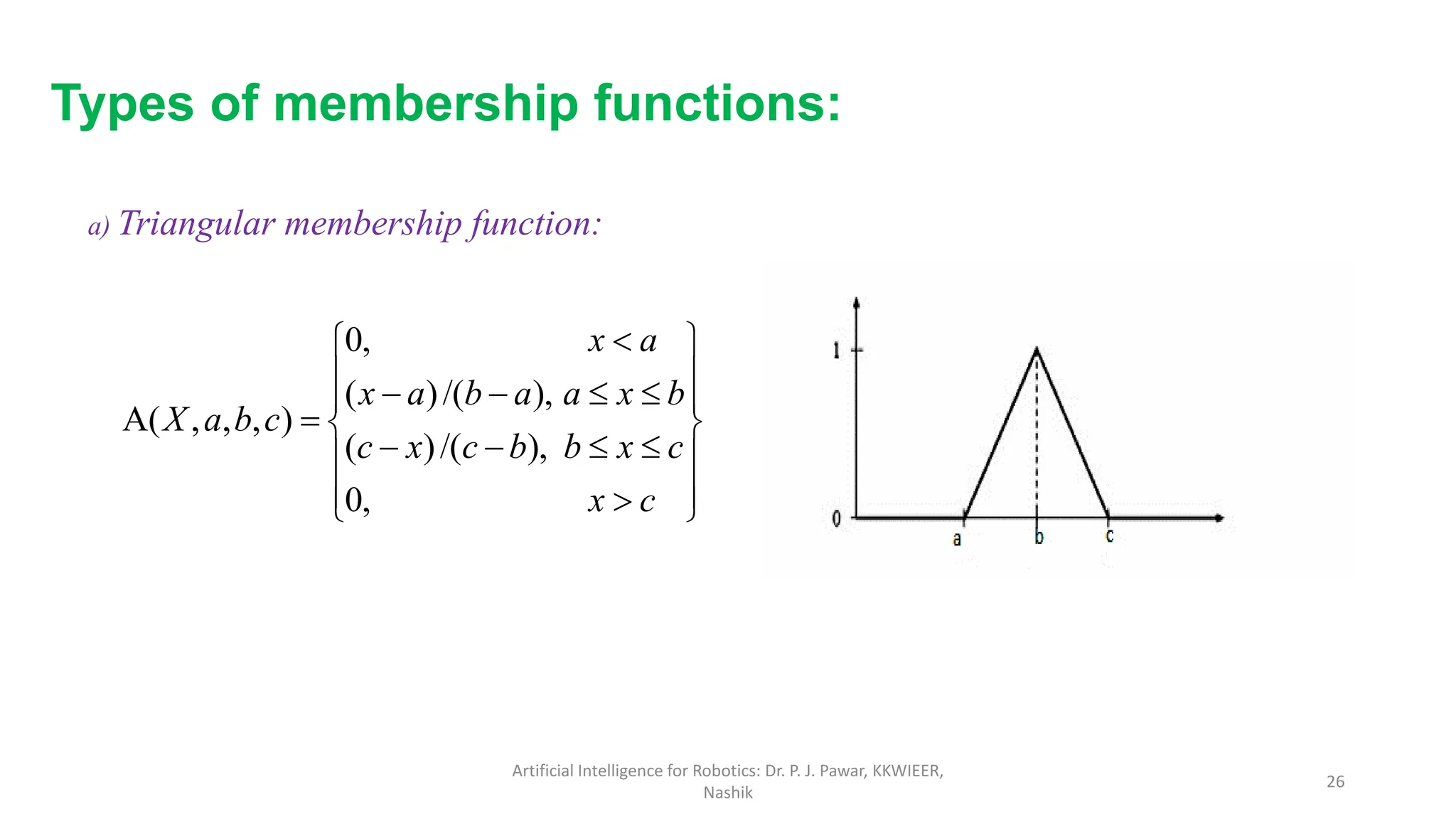
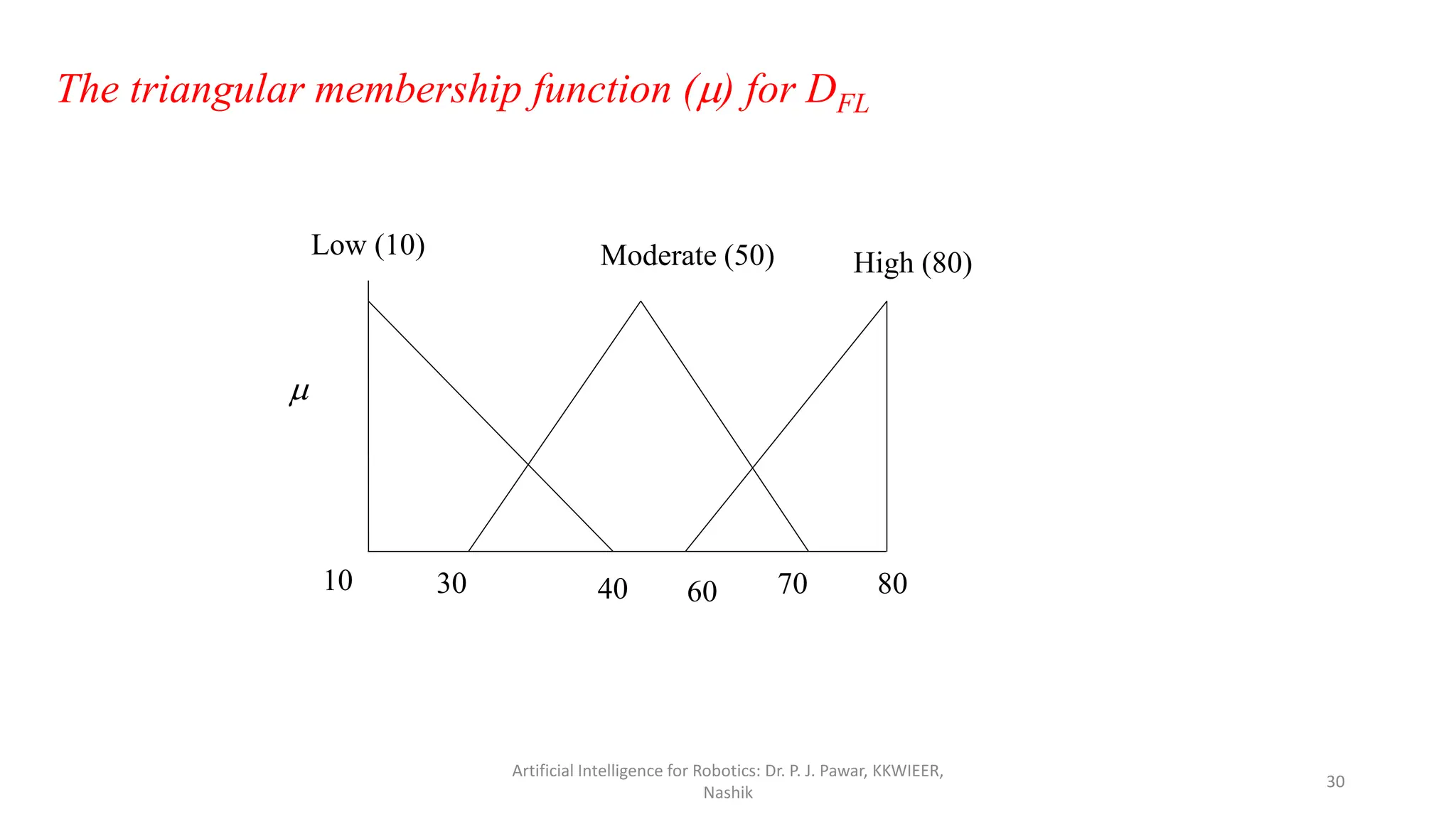
Membership function for DFL [Low, Moderate, High]
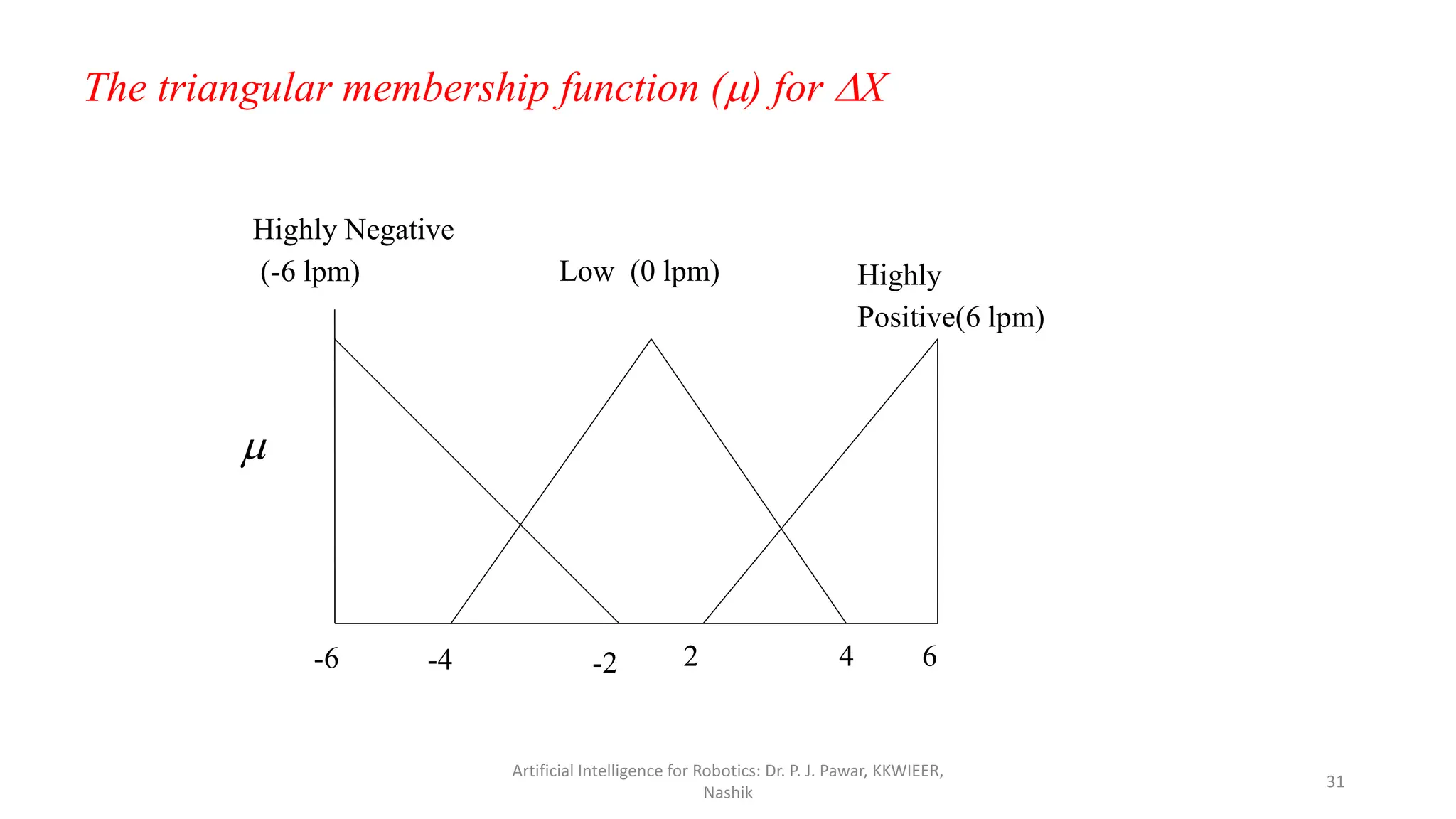
Membership function for X [Negative, Average,
Positive]
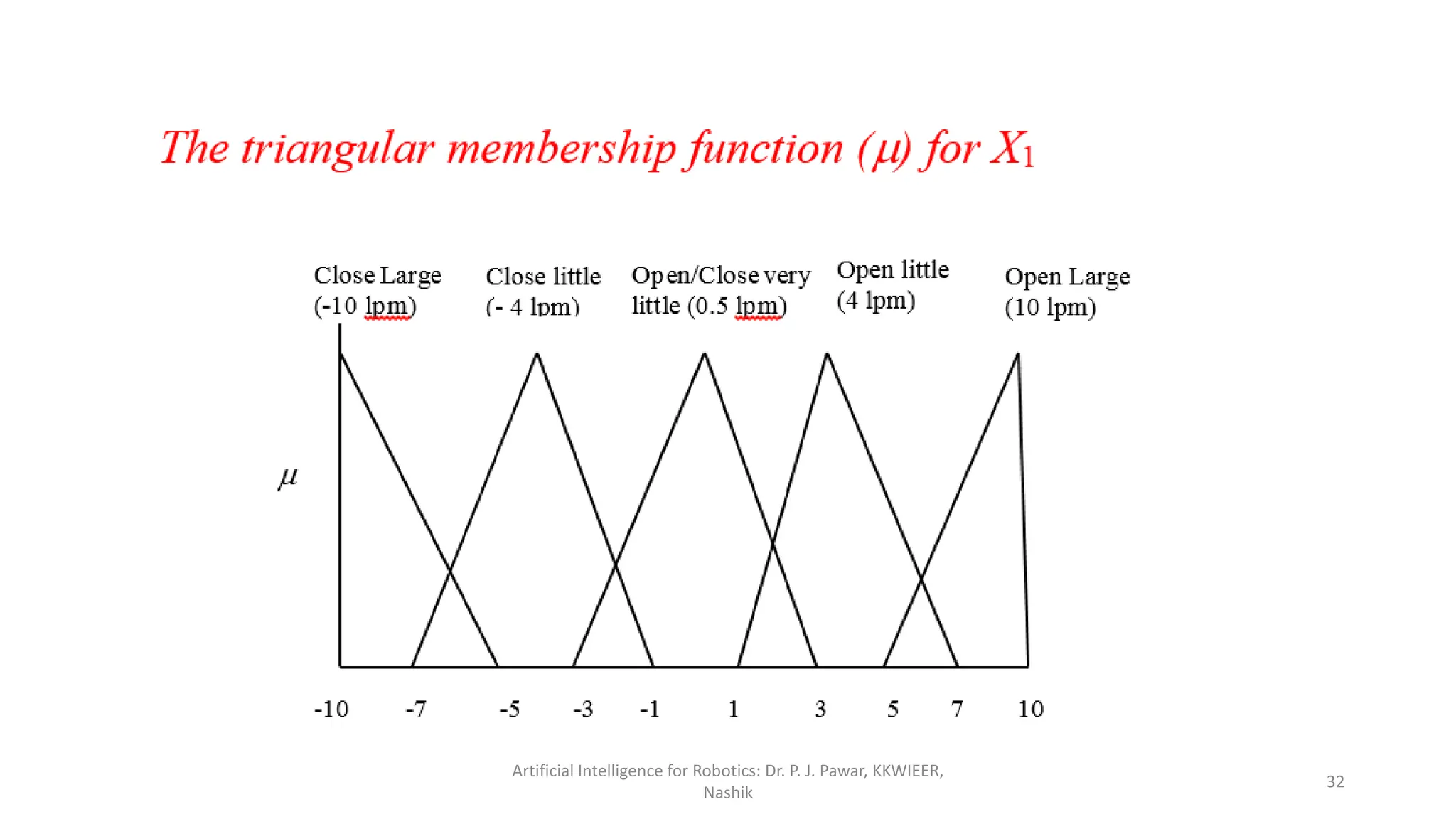
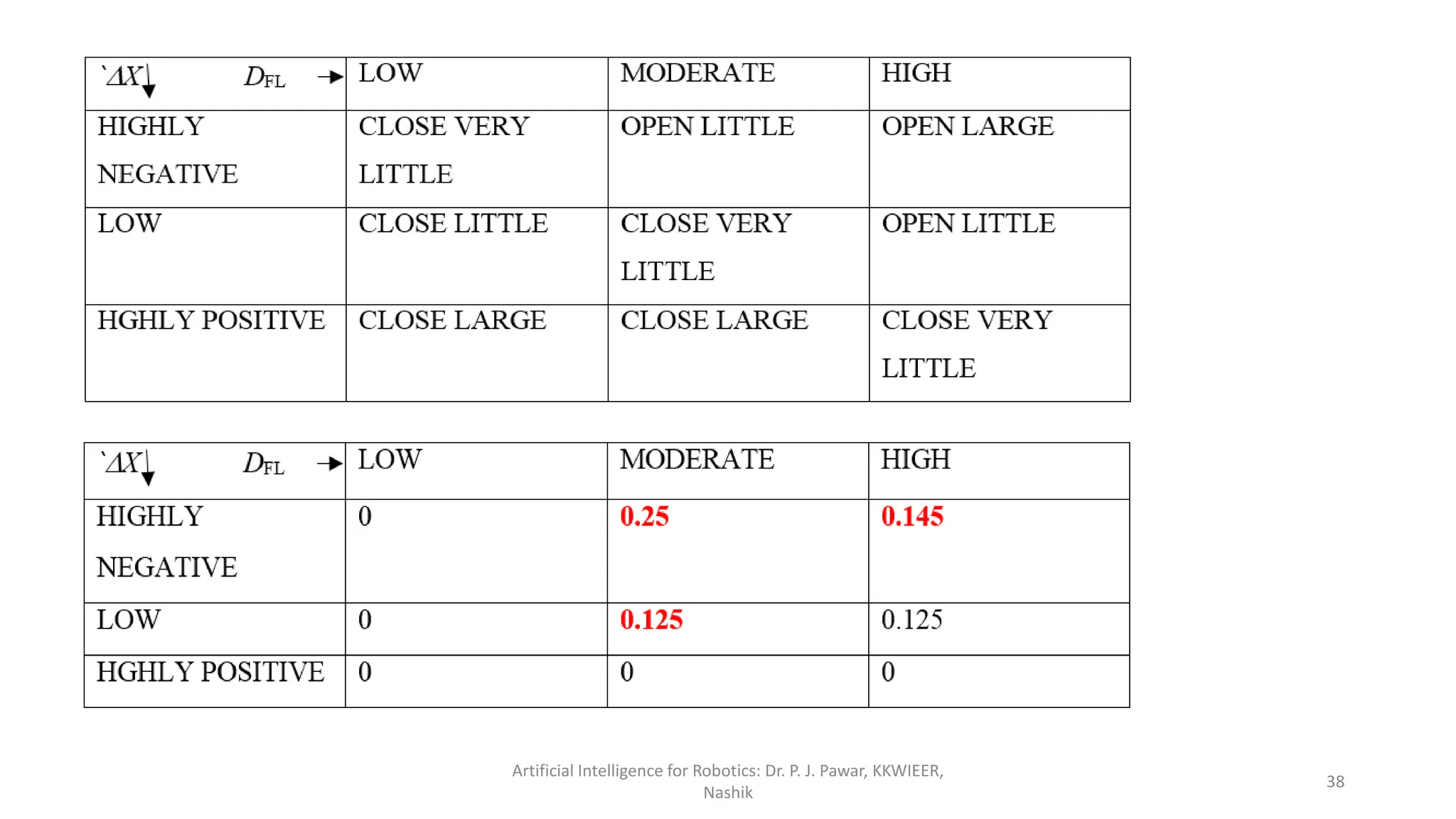
Membership function for response X1 :
[Open more, Open Less, Average, Close less, Close
More].
Artificial Intelligence for Robotics: Dr. P. J. Pawar, KKWIEER,
Nashik
29](https://image.slidesharecdn.com/unit11-240317043906-88b8a455/75/Artificial-Intelligence-for-Robotic-AIFR-29-2048.jpg)
![Artificial Intelligence for Robotics: Dr. P. J. Pawar, KKWIEER,
Nashik
60
[30-70] [2-9] [10-35]
x1 x2 x3
1 36 8 26
2 67 9 32
3 34 3 35
4 69 4 23
5 34 2 27
6 49 8 25
7 53 6 11
8 66 9 18
9 62 5 23
10 54 3 20
Quanity of alloying element (gm)
Type
of
alloy
steel
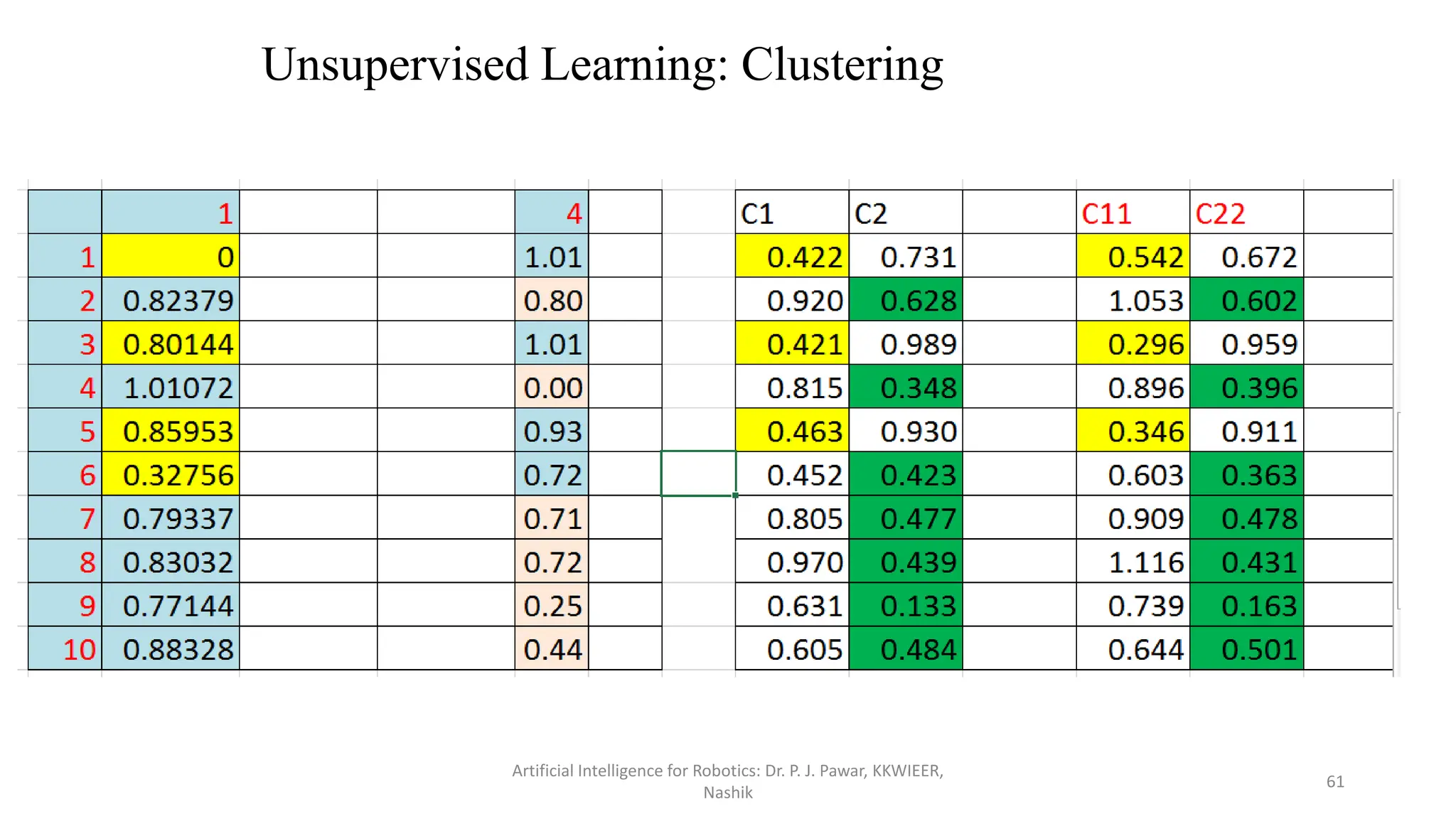
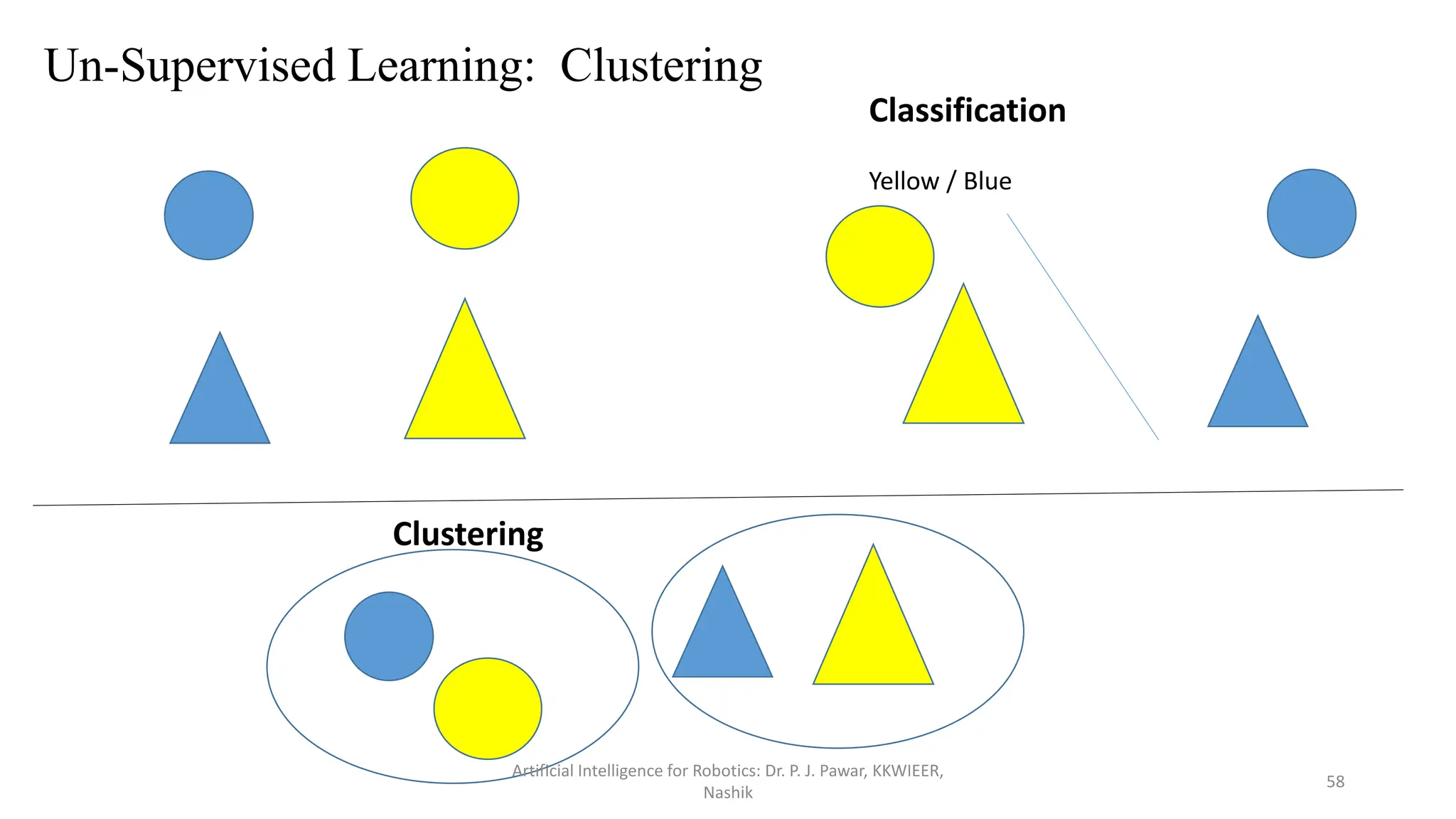
Unsupervised Learning: Clustering](https://image.slidesharecdn.com/unit11-240317043906-88b8a455/75/Artificial-Intelligence-for-Robotic-AIFR-60-2048.jpg)