İçerik
1. Akım KontrolYöntemi
a) Voltage Chopping ( Gerilim Kıyıcı)
b) Hysteresis Control (Histeresiz Kontrol)
2. Açı Kontrol Yöntemi
a) Switching Angle Control (Anahtarlama Açı Kontrolü)
i. Fixed Switching Angle Control (Sabit Anahtarlama Açı Kontrol)
ii. Advance Angle Control
iii. Switching Off Control (Anahtar Kesim Kontrol)
b) Single Pulse Control (Tek Darbe Kontrolü)
c) Dynamic Angle Control (Dinamik Açı Kontrolü)
3.
Bir motor sürücükontrol sisteminin merkezi akım kontrolüdür.
DC sürücülerin birçoğunda tork kontrolü ile akım kontrolü birbirine benzerdir. Fakat nonlineerliğinden dolayı
ARM Sürücüler bu konuda diğer sürücülerden önemli ölçüde farklıdır.
Anahtarlamalı Relüktans Motorlarında tork dalgalanması iki şekilde minimize edilebilir:
• Motor Tasarım aşamasında Manyetik Devre Tasarımı ile,
• Tork Kontrol Yöntemleri ile
ARM’de Tork Kontrolü sayesinde düşük tork dalgalanmasının yanı sıra gürültü azaltılabilir, hatta ARM’nin
verimi artırılabilir.
Ayrıca Tork kontrolü ile, ARM’nin hız kontrolü de basit bir hal alır. Diğer motor sürücülere benzer şekilde hız
kontrolü için PI(Propotional Integral)(oransal-integral) kontrol yöntemi kullanılabilir.
4.
Akım Kontrol Yöntemi
AkımKontrol Yöntemi normalde, üretilen tork’u verimli bir şekilde kontrol edebilmek için
kullanılır. Voltaj kontrolünde, düşük bütçeli sistemlerde de bu kullanılabilir olması için akım
sensörü kullanımından kaçınılır. Bu yüzden de Voltaj kontrolünün akım sınırlaması yoktur.
Mikroişlemcilerin gelişimiyle, kontrol yöntemleri analog uygulamalardan dijital uygulamalara
geçmiştir. Buna rağmen yüksek performanslı akım kontrolcüsü tasarımında karşılaşılan
problemler tam anlamıyla aşılamamıştır.
Akım kontrol yönteminin temel fikri, zamanlama ve voltaj darbelerinin genliğinin ayarlanmasıdır.
Akım kontrolünde iki yöntem sıklıkla kullanılır: Voltage Chopping Control (Gerilim Kıyıcı Kontrol
Yöntemi) ve Hysteresis Control (Histeresiz Kontrol Yöntemi).
Voltage Chopping ControlMethod
(Gerilim Kıyıcı Kontrol Yöntemi)
Bu kontrol yönteminde testere dişli dalga ile karşılaştırılan bir referans sinyal veya doğrudan bir
PWM generatorü kullanılır.
PWM Doluluk oranının kontrolü ile ortalama DC çıkış gerilimi kontrol edilir.
Hızlı bir şekilde yüksek bir uyarma akımı elde edebilmek için yüksek bir voltajda anahtarlama
yapmak gerekir.
7.
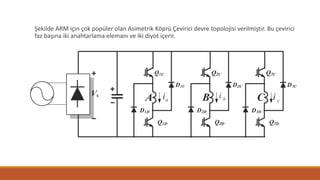
Şekilde ARM içinçok popüler olan Asimetrik Köprü Çevirici devre topolojisi verilmiştir. Bu çevirici
faz başına iki anahtarlama elemanı ve iki diyot içerir.
8.
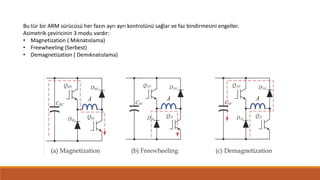
Bu tür birARM sürücüsü her fazın ayrı ayrı kontrolünü sağlar ve faz bindirmesini engeller.
Asimetrik çeviricinin 3 modu vardır:
• Magnetization ( Mıknatıslama)
• Freewheeling (Serbest)
• Demagnetization ( Demıknatıslama)
9.
Şekilden görüldüğü üzereuyarma gerilimi ve demıknatıslanma gerilimi, terminal gerilimine yakın değerlerdir.
Sabit DC bara geriliminin olması ARM sürücünün performansını sınırlar.
Diğer yandan, gerilim kıyıcı yöntemi düşük hızlarda kontrol için kullanışlıdır. Bu tür bir PWM yöntemi sabit bir
frekans ile gerilim kıyıcı işlevini gerçekleştirir.
Gerilim Kıyıcı yöntemi, Hard Chopping (Sert Kıyıcı) ve Soft Chopping (Yumuşak Kıyıcı) olmak üzere iki bölüme
ayrılabilir.
Sert kıyıcı yönteminde, her iki faz anahtarı da aynı darbe sinyali ile sürülür, İki anahtar aynı anda açılır ve aynı
anda kapanır. Böylelikle Güç Devresi, yalnızca 3 darbe sinyali kullanarak daha kolay tasarlanabilir ve daha ucuz
bir bir hal alır. Sert Kıyıcı yönteminin bir dezavantajı ise akım dalgalanmalarının önemli ölçüde artmasıdır.
Yumuşak Kıyıcı yöntemi akımı kontrol etmenin yanısıra, akım dalgalanmasının da minimize edilmesini sağlar. Bu
yöntemde, alt taraftaki anahtar kam açısı (dwell angle) boyunca on(iletimde) bırakılır ve üst taraftaki transistör
darbe sinyali ile sürülür. Bu yöntemde Güç devresi 6 PWM sinyalini birden işlemek zorundadır.
10.
Histeresis Akım KontrolYöntemi
Histerezis akım kontrolde Anlık faz akımı akım sensörü kullanılarak ölçülür , akım belirlenen bir
Histeresis değerini (ihi) aştığında faz ayağındaki anahtarlardan biri pasif yapılır. Akım ikinci bir
seviyeye (ilo) düştüğünde tekrar aktif yapılır, akımın (ihi) ve (ilo) arasındaki değişimi(Δi)
“histerezis bant” olarak isimlendirilir.
Histerezis akım kontrolü genellikle akımın düzgün dalga formunda kalmasını sağlar. Δi ve
bant genişliği akım regülatörü tarafından belirlenir. Yüksek hızda zıt EMK akımın (ihi)
değerinin üzerine çıkmasını önler. Daha sonra akım dalga formu, rotor dönüşlerinde, zıt EMK ve
değişken indüktans tarafından doğal bir şekilde belirlenir.
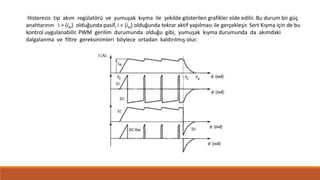
11.
Histerezis tip akımregülatörü ve yumuşak kıyma ile şekilde gösterilen grafikler elde edilir. Bu durum bir güç
anahtarının i > (ihi) olduğunda pasif, i < (ilo) olduğunda tekrar aktif yapılması ile gerçekleşir. Sert Kıyma için de bu
kontrol uygulanabilir. PWM gerilim durumunda olduğu gibi, yumuşak kıyma durumunda da akımdaki
dalgalanma ve filtre gereksinimleri böylece ortadan kaldırılmış olur.
12.
Angle Control
Yüksektork dalgalanmasının oluşması ve hassas
hız kontrolünün yapılamaması ARM’nin
sorunlarındandır. Bu sorunların arkasında yatan
sebep ise kontrolcünün belirli dwell açısı ve giriş
gerilimine göre belirlenmiş mmf akımı ile
çalışmamasıdır.
Yüksek verimli hassas hız kontrolü için ,
kontrolcü dwell açısını ve giriş gerilimini anlık
olarak kontrol etmelidir.
13.
Switching Angle Control
ARMkontrolcülerinde stator faz uyarmaları ile rotor pozisyonunun senkron olması çok
önemlidir. Uygun bir anahtarlama için rotor pozisyonun doğru şekilde okunması gereklidir.
Bu sayede optimum verim elde edilebilir. Anahtarlama açı kontrolünün çeşitleri aşağıdaki
gibidir.
A. Fixed switching angle control
B. Advance switching angle control
C. Switching-off angle control
14.
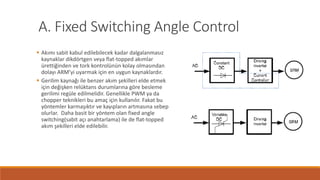
A. Fixed SwitchingAngle Control
Akımı sabit kabul edilebilecek kadar dalgalanmasız
kaynaklar dikdörtgen veya flat-topped akımlar
ürettiğinden ve tork kontrolünün kolay olmasından
dolayı ARM’yi uyarmak için en uygun kaynaklardır.
Gerilim kaynağı ile benzer akım şekilleri elde etmek
için değişken relüktans durumlarına göre besleme
gerilimi regüle edilmelidir. Genellikle PWM ya da
chopper teknikleri bu amaç için kullanılır. Fakat bu
yöntemler karmaşıktır ve kayıpların artmasına sebep
olurlar. Daha basit bir yöntem olan fixed angle
switching(sabit açı anahtarlama) ile de flat-topped
akım şekilleri elde edilebilir.
15.
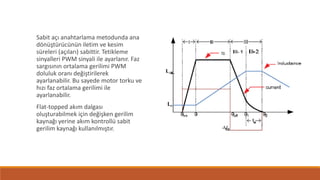
Sabit açı anahtarlamametodunda ana
dönüştürücünün iletim ve kesim
süreleri (açıları) sabittir. Tetikleme
sinyalleri PWM sinyali ile ayarlanır. Faz
sargısının ortalama gerilimi PWM
doluluk oranı değiştirilerek
ayarlanabilir. Bu sayede motor torku ve
hızı faz ortalama gerilimi ile
ayarlanabilir.
Flat-topped akım dalgası
oluşturabilmek için değişken gerilim
kaynağı yerine akım kontrollü sabit
gerilim kaynağı kullanılmıştır.
16.
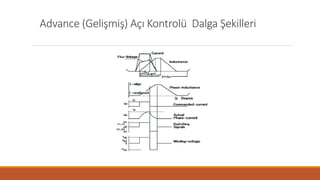
B. Advance AngleControl
ARM giriş gerilimi , iletim açısı ve kesim açısı ile kontrol edilir. İletim ve kesim açıları ile akımın
genliği ve şekli ayarlanır. Bu sayede üretilen torkun genliği ve şekli ayarlanmış olur. Akımı efektif
şekilde ayarlayabilmek için strator kutbu ile rotor kutbu buluşmadan önce gelişmiş bir
anahtarlama yapılmalıdır. İletim açısı build-up (toparlama ) akımını ayarlamak için gereken ana
etkenlerden biridir. Bu sebeple optimum sürme karakteristiğinin elde edilmesi için bu açı yüksek
doğrulukla kontrol edilir.
17.
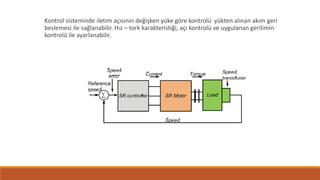
Kontrol sisteminde iletimaçısının değişken yüke göre kontrolü yükten alınan akım geri
beslemesi ile sağlanabilir. Hız – tork karakteristiği, açı kontrolü ve uygulanan gerilimin
kontrolü ile ayarlanabilir.
C.Switching-off Angle Control
Kesimaçısı kontrolü değişken yükler için daha çok kullanılmaktadır. Motor hızına ve yüke
göre uygun iletim açısı sensor sinyalinin negatif eğimi ile on(iletim) sinyailinin kesişim
noktasına set edilir.
İki tip switch-off angle kontrol yöntemi vardır .Bunlar:
◦ Sabit Tork Açı Kontrol
◦ Sabit Dwell Açı Kontrol
20.
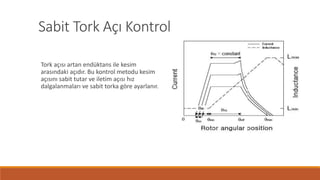
Sabit Tork AçıKontrol
Tork açısı artan endüktans ile kesim
arasındaki açıdır. Bu kontrol metodu kesim
açısını sabit tutar ve iletim açısı hız
dalgalanmaları ve sabit torka göre ayarlanır.
21.
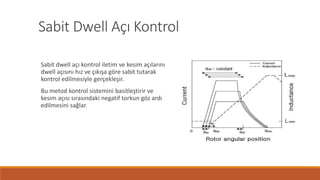
Sabit Dwell AçıKontrol
Sabit dwell açı kontrol iletim ve kesim açılarını
dwell açısını hız ve çıkışa göre sabit tutarak
kontrol edilmesiyle gerçekleşir.
Bu metod kontrol sistemini basitleştirir ve
kesim açısı sırasındaki negatif torkun göz ardı
edilmesini sağlar.
22.
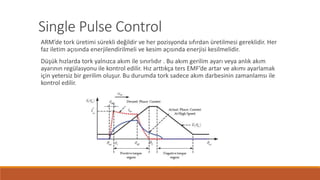
Single Pulse Control
ARM’detork üretimi sürekli değildir ve her pozisyonda sıfırdan üretilmesi gereklidir. Her
faz iletim açısında enerjilendirilmeli ve kesim açısında enerjisi kesilmelidir.
Düşük hızlarda tork yalnızca akım ile sınırlıdır . Bu akım gerilim ayarı veya anlık akım
ayarının regülasyonu ile kontrol edilir. Hız arttıkça ters EMF’de artar ve akımı ayarlamak
için yetersiz bir gerilim oluşur. Bu durumda tork sadece akım darbesinin zamanlamsı ile
kontrol edilir.
23.
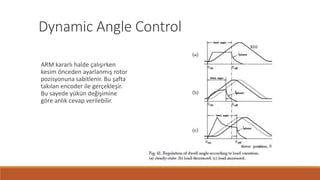
Dynamic Angle Control
ARMkararlı halde çalışırken
kesim önceden ayarlanmış rotor
pozisyonuna sabitlenir. Bu şafta
takılan encoder ile gerçekleşir.
Bu sayede yükün değişimine
göre anlık cevap verilebilir.
24.
Kaynakça
«Torque Control» Chapter8 Jin-Woo Ahn, Ph.D Kyungsung University /Korea
«SWITCHED RELUCTANCE MOTOR DRIVES» R. Krishnan, Virginia Tech