This document provides an overview of key concepts in vector calculus, including:
- Vector calculus concepts such as limits, continuity, derivatives, and integrals of vector functions.
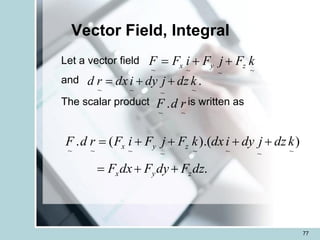
- Operations on vectors like addition, subtraction, scalar multiplication.
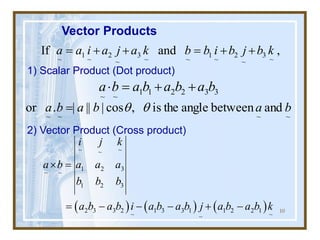
- Vector products including the dot product and cross product.
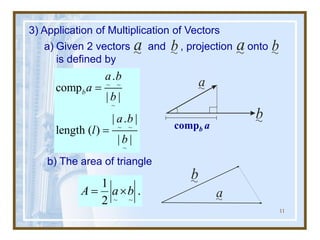
- Applications of vector calculus like determining velocity, acceleration, and line, surface, and volume integrals.
- Parametric representations of curves using a parameter like time, and their relation to geometry.
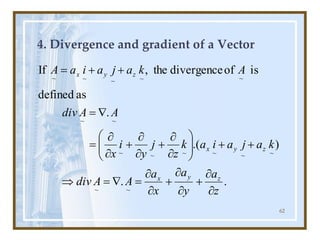
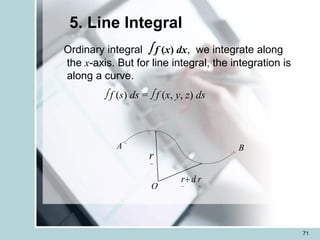
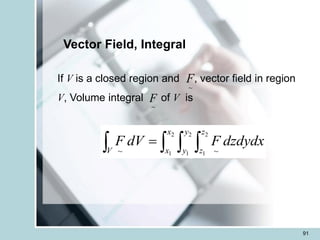
![6
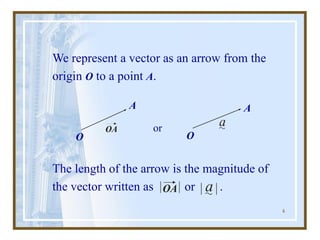
Magnitude of vectors
Let P = (x, y, z). Vector is defined by
with magnitude (length)
OP = = + +
p x i y j z k
= [ ]
x, y, z
OP = p
OP = = + +
p x y z
2 2 2](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-6-320.jpg)
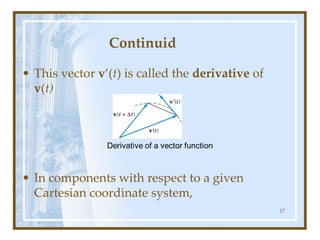
![Continuid
• Hence the derivative v’(t) is obtained by
differentiating each component separately.
For instance, if v = [t, t2, 0], then v’ = [1, 2t, 0].
18
1 2 3
( ) ( ), ( ), ( ) .
t v t v t v t
=
v](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-18-320.jpg)
![30
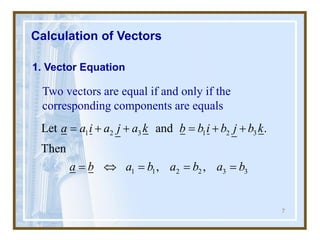
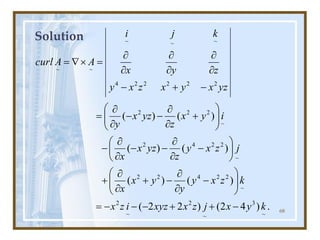
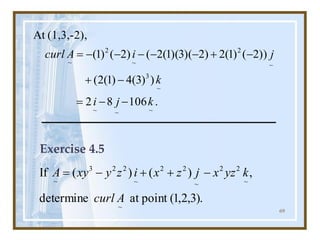
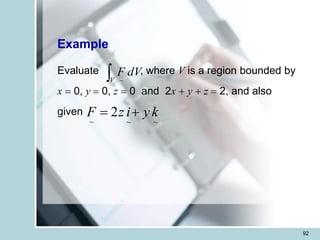
Example
.
80
2
42
]
[
]
5
[
]
2
[
4
)
5
2
(
)
4
3
(
.
calculate
,
4
)
5
2
(
)
4
3
(
If
~
~
~
~
3
1
4
~
3
1
2
~
3
1
2
3
3
1 ~
3
3
1 ~
3
1 ~
2
3
1 ~
3
1 ~
~
3
~
~
2
~
k
j
i
k
t
j
t
t
i
t
t
k
dt
t
j
dt
t
i
dt
t
t
dt
F
dt
F
k
t
j
t
i
t
t
F
+
-
=
+
-
+
+
=
+
-
+
+
=
+
-
+
+
=
Answer](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-30-320.jpg)
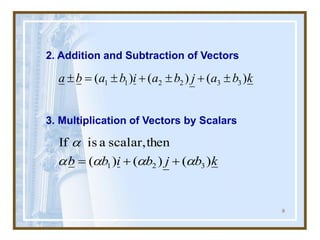
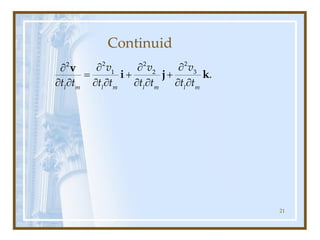
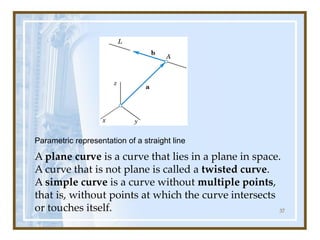
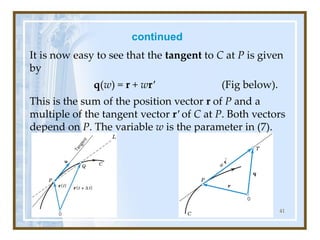
![A typical parametric representation is given by
(1) r(t) = [x(t), y(t), z(t)] = x(t)i + y(t)j + z(t)k
34](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-34-320.jpg)
![This means that as we increase t, we travel along the
curve C in a certain direction. The sense of increasing
t is called the positive sense on C. The sense of
decreasing t is then called the negative sense on C,
given by (1).
• Example: Straight Line
A straight line L through a point A with position
vector a in the direction of a constant vector b (see in
the figure below)
can be represented parametrically in the form
(3) r(t) = a + tb = [a1 + tb1, a2 + tb2, a3 + tb3].
36](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-36-320.jpg)
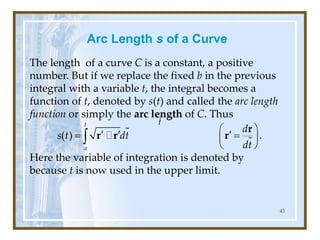
![Arc Length(Continued)
Linear Element ds.
It is customary to write
dr = [dx, dy, dz] = dx i + dy j + dz k
and
ds2 = dr • dr = dx2 + dy2 + dz2.
ds is called the linear element of C.
Arc Length as Parameter.
The use of s in instead of an arbitrary t simplifies
various formulas. For the unit tangent vector we
simply obtain
44](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-44-320.jpg)
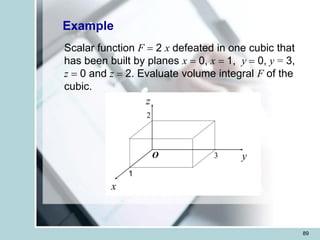
![90
= = =
=
2
0
3
0
1
0
2
z y x
V
xdxdydz
FdV
Solution
6
]
[
3
3
]
[
2
1
.
2
2
1
2
2
2
2
0
2
0
3
0
2
0
2
0
3
0
1
0
2
0
3
0
2
=
=
=
=
=
=
=
=
= =
= =
z
dz
dz
y
dydz
dydz
x
z
z
z y
z y](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-90-320.jpg)

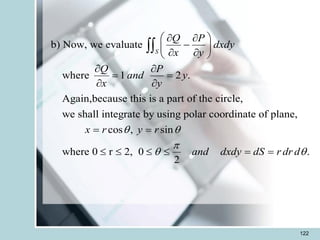
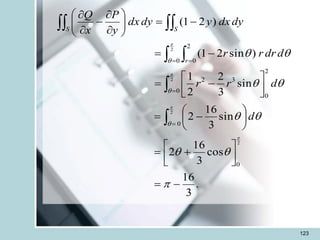
![114
f
f
f
f
f
f
f
f
f
f
d
d
d
d
S
d
F
S
]
cos
sin
sin
sin
2
cos
sin
sin
3
[
9
]
sin
9
[
]
cos
3
)
sin
sin
3
(
2
)
sin
sin
3
)(
cos
sin
3
[(
3
1
.
2
0 0
3
0 0
~
~
2 2
2 2
+
+
=
+
+
=
= =
= =
+
=
4
3
1
9
](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-114-320.jpg)
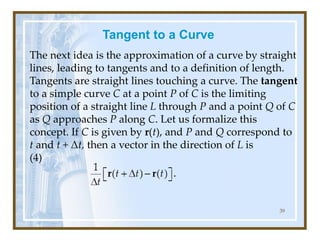
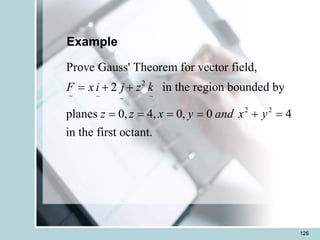
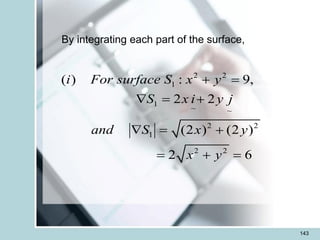
![117
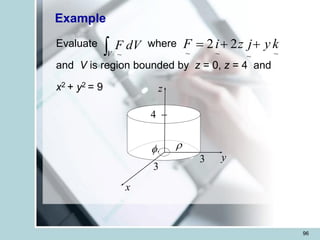
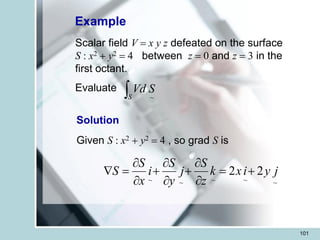
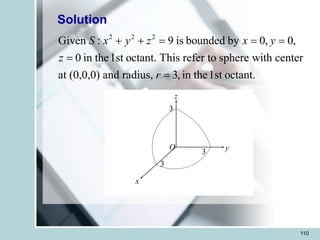
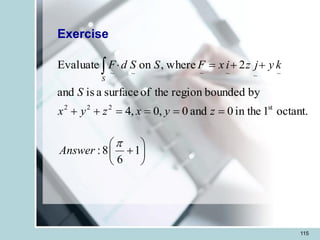
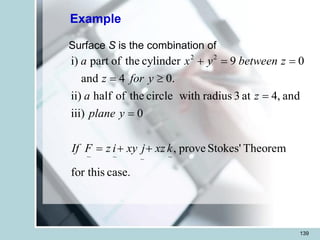
Example
2 2
2 2
Prove Green's Theorem for
[( ) ( 2 ) ]
which has been evaluated by boundary that defined as
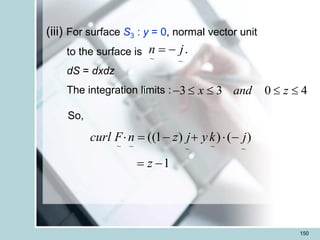
0, 0 4 in the first quarter.
c
x y dx x y dy
x y and x y
+ + +
= = + =
y
2
x
2
C3
C2
C1
O
x2 + y2 = 22
Solution](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-117-320.jpg)
![118
1 1
2 2
2 2
1 2 3
1
2 2
2
2
0
2
3
0
Given [( ) ( 2 ) ] where
and 2 . We defined curve
as , .
i) For : 0, 0 0 2
( ) ( ) ( 2 )
1 8
.
3 3
c
c c
x y dx x y dy
P x y Q x y c
c c and c
c y dy and x
Pdx Qdy x y dx x y dy
x dx
x
+ + +
= + = +
= =
+ = + + +
=
= =
](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-118-320.jpg)
![120
.
4
4
8
sin
4
2
sin
2
cos
8
)
cos
sin
8
2
cos
2
2
sin
8
(
)
cos
sin
8
cos
4
sin
8
(
)]
cos
2
))(
sin
2
(
2
cos
2
((
)
sin
2
)(
)
sin
2
(
)
cos
2
((
[
)
2
(
)
(
)
(
2
2
2
2
2
2
0
2
0
0
2
2
2
0
2
2
-
=
+
+
-
=
+
+
+
=
+
+
+
-
=
+
+
-
=
+
+
-
+
=
+
+
+
=
+
d
d
d
d
dy
y
x
dx
y
x
Qdy
Pdx
c
c](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-120-320.jpg)
![130
2
2
2
2
2
2
2 4
0 0 0
2
2 4
0
0 0
2
0 0
2 2
0
0
0
0
~
Therefore,
(1 2 ) (1 2 )
[ ]
(20 )
[10 ]
(40)
40
20 .
20 .
V z
V
z dV z dzd d
z z d d
d d
d
d
div F dV
f
f
f
f
f
f
f
f
f
f
f
= = =
= =
= =
=
=
+ = +
= +
=
=
=
=
=
=
](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-130-320.jpg)
![Continued
value of a function at another point. The role
of an anti derivative for F is played by the
scalar function f, and the role of the
endpoints of the interval [a, b] are played by
the endpoints of C, r(a), r(b).
• One consequence of this theorem is that if
F is conservative on R 2 , then the value of
a line integral of F along C does not
actually depend on the path taken by C,
but only on the endpoints of C. That is, a
phenomenon like that which we observed
in the previous set of examples can never
158](https://image.slidesharecdn.com/appliediiichapter41-230113135707-3837aef7/85/Applied-III-Chapter-4-1-pdf-158-320.jpg)