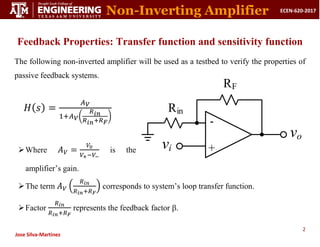
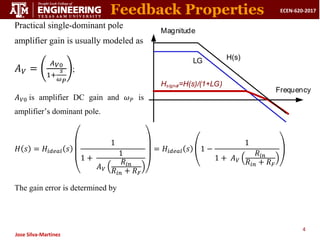
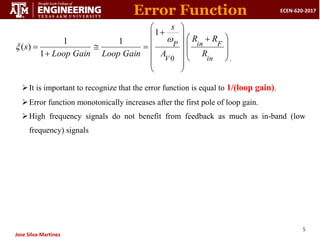
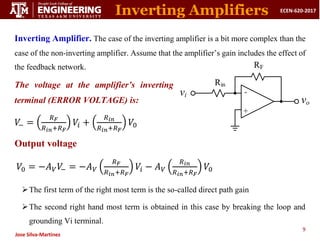
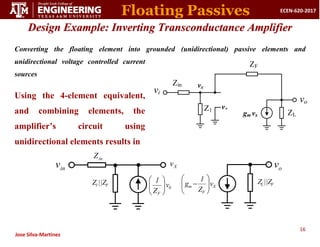
This document discusses feedback amplifiers and their properties. It begins by introducing a non-inverting amplifier testbed and defining its transfer function. It then discusses how the feedback factor and loop transfer function are represented in the transfer function. It also discusses how feedback improves sensitivity to gain variations. The document then examines inverting amplifiers and their transfer functions. It analyzes error functions and loop gain and how they relate to the accuracy and bandwidth of feedback amplifiers. Design guidelines for achieving limited gain error are also provided.


![14
ECEN-620-2017
Jose Silva-Martinez
𝐿𝐺 = (
𝑍𝑖𝑛 ∥ 𝑍1
𝑍𝑖𝑛 ∥ 𝑍1 + 𝑍𝐹
) [(𝑔𝑚 −
1
𝑍𝐹
) (𝑍𝐿 ∥ 𝑍𝐹)]
The first term is the feedback factor,
The 2nd factor is the amplifier’s gain.
Notice that amplifier’s transconductance gain is affected by the feedback element!
A right hand plane zero arises when ZF is capacitive; that may hurt your phase margin.
When considering capacitors
or more complex networks it
is not evident where the poles
and zeros are located.
The culprit for these
complications is the floating
element ZF.
vi
vo
Zin
Z1
ZF
vx
ZL
gm vx
v+
Transconductance Amplifiers](https://image.slidesharecdn.com/amplifiers-and-feedback-220731081241-27ee200c/85/Amplifiers-and-Feedback-pdf-14-320.jpg)




























![Agilent ADS 模擬手冊 [實習2] 放大器設計](https://cdn.slidesharecdn.com/ss_thumbnails/2adsamp-150613072818-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)





































