Science of AI
Physics:Where did the physical universe come from?
And what laws guide its dynamics?
Biology: How did biological life evolve?
And how do living organisms function?
AI: What is the nature of intelligent thought?
4.
What is intelligence?
Abilityto perceive and act in the world
Planning: take decisions Learning and
Adaptation: recommend movies,
learn traffic patterns
Understanding: text, speech, visual scene
Dictionary.com: capacity for learning,
reasoning, understanding, and similar
forms of mental activity
Reasoning: proving theorems, medical diagnosis
5.
Intelligence vs. humans
Arehumans intelligent?
Are humans always intelligent?
Can non-human behavior be intelligent?
replicating human behavior early hallmark of
intelligence
6.
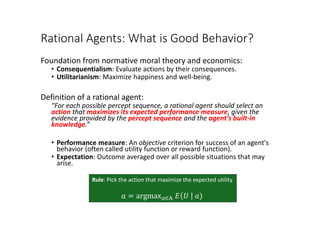
What is artificialintelligence?
thought
vs.
behavior
human-like vs. rational
computers do things at
which, at the moment,
people are better” (Rich &
Knight 1991)
“[automation of] activities
that we associate with
human thinking, activities
such as decision making,
problem solving, learning…”
(Bellman 1978)
“The study of mental
faculties through the use of
computational models”
(Charniak& McDertmott
1985)
science that is concerned
with the automation of
intelligent behavior” (Luger &
Stubblefield 1993)
“The study of how to make “The branch of computer
7.
What is artificialintelligence?
thought
vs.
behavior
human-like vs. rational
Systems that think
like humans
Systems that think
rationally
Systems that act like Systems that act
humans rationally
8.
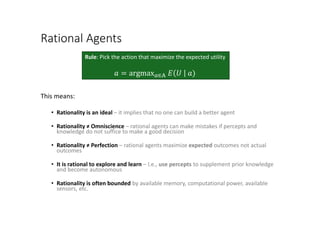
The Goal ofAI
Think like a
human?
Act like a
human?
Think
rationally?
Act
rationally?
“Have machines solve problems that are challenging for humans.”
Narrow AI
How can we achieve this? Create an agent that can:
We call such a machine an intelligent agent.
•An intelligent
agent that can
solve a specific
problem.
E.g., drive a car or
play chess.
•A hypothetical
intelligent agent
which can
understand or
learn any
intellectual task
thathumanbeings
can.
•A hypothetical
intelligent agent
possessing
intelligence
surpassing that of
the brightest and
most gifted human
minds.
Artificial General
Intelligence (AGI)
[Wikipedia: AGI] [Wikipedia:
Superintelligence]
Artificial
Superintelligence
9.
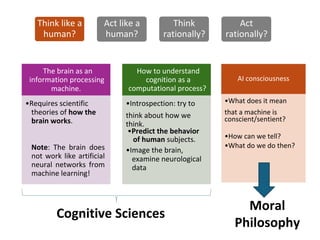
Cognitive Sciences
Moral
Philosophy
Note: Thebrain does
not work like artificial
neural networks from
machine learning!
The brain as an
information processing
machine.
•Requires scientific
theories of how the
brain works.
How to understand
cognition as a
computational process?
•Introspection: try to
think about how we
think.
•Predict the behavior
of human subjects.
•Image the brain,
examine neurological
data
Think like a
human?
Act like a
human?
Think
rationally?
Act
rationally?
AI consciousness
•What does it mean
that a machine is
conscient/sentient?
•How can we tell?
•What do we do then?
10.
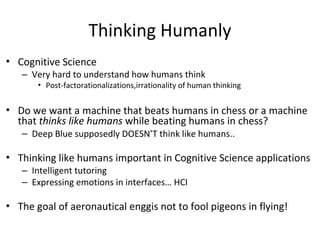
Thinking Humanly
•
•
•
•
Cognitive Science
–
Thegoal of aeronautical enggis not to fool pigeons in flying!
Do we want a machine that beats humans in chess or a machine
that thinks like humans while beating humans in chess?
–
Thinking like humans important in Cognitive Science applications
–
–
Intelligent tutoring
Expressing emotions in interfaces… HCI
Very hard to understand how humans think
• Post-factorationalizations,irrationality of human thinking
Deep Blue supposedly DOESN’T think like humans..
11.
Alan Turing (1950)
“Computing
machineryand
Natural language processing
Knowledge representation
Automated reasoning
Machine learning
intelligence”
•
•
•
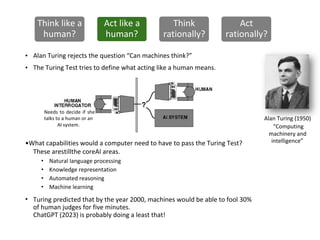
Alan Turing rejects the question “Can machines think?”
The Turing Test tries to define what acting like a human means.
•What capabilities would a computer need to have to pass the Turing Test?
These arestillthe coreAI areas.
Turing predicted that by the year 2000, machines would be able to fool 30%
of human judges for five minutes.
ChatGPT (2023) is probably doing a least that!
•
•
•
•
Think like a
human?
Act like a
human?
Think
rationally?
Act
rationally?
Needs to decide if she
talks to a human or an
AI system.
12.
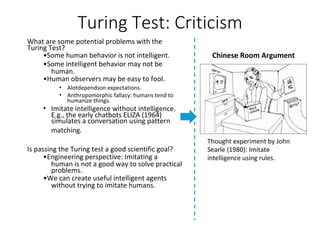
Turing Test: Criticism
Whatare some potential problems with the
Turing Test?
•Some human behavior is not intelligent.
•Some intelligent behavior may not be
human.
•Human observers may be easy to fool.
Imitate intelligence without intelligence.
E.g., the early chatbots ELIZA (1964)
simulates a conversation using pattern
matching.
Is passing the Turing test a good scientific goal?
•Engineering perspective: Imitating a
human is not a good way to solve practical
problems.
•We can create useful intelligent agents
•
without trying to imitate humans.
•
•
Alotdependson expectations.
Anthropomorphic fallacy: humans tend to
humanize things.
Chinese Room Argument
Thought experiment by John
Searle (1980): Imitate
intelligence using rules.
13.
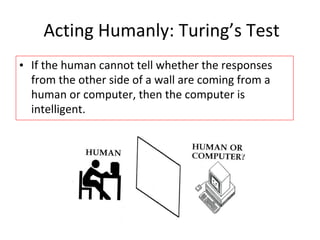
Acting Humanly: Turing’sTest
• If the human cannot tell whether the responses
from the other side of a wall are coming from a
human or computer, then the computer is
intelligent.
14.
Think like a
human?
Actlike a
human?
Think
rationally?
Act
rationally?
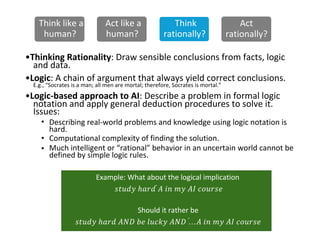
•Thinking Rationality: Draw sensible conclusions from facts, logic
and data.
•Logic: A chain of argument that always yield correct conclusions.
E.g., “Socrates is a man; all men are mortal; therefore, Socrates is mortal.”
•Logic-based approach to AI: Describe a problem in formal logic
notation and apply general deduction procedures to solve it.
Issues:
•
•
•
Describing real-world problems and knowledge using logic notation is
hard.
Computational complexity of finding the solution.
defined by simple logic rules.
Much intelligent or “rational” behavior in an uncertain world cannot be
Should it rather be
𝑠𝑡𝑢𝑑𝑦 ℎ𝑎𝑟𝑑 𝐴𝑁𝐷 𝑏𝑒 𝑙𝑢𝑐𝑘𝑦 𝐴𝑁𝐷 …֜𝐴 𝑖𝑛 𝑚𝑦 𝐴𝐼 𝑐𝑜𝑢𝑟𝑠𝑒
Example: What about the logical implication
𝑠𝑡𝑢𝑑𝑦 ℎ𝑎𝑟𝑑 ֜𝐴 𝑖𝑛 𝑚𝑦 𝐴𝐼 𝑐𝑜𝑢𝑟𝑠𝑒
15.
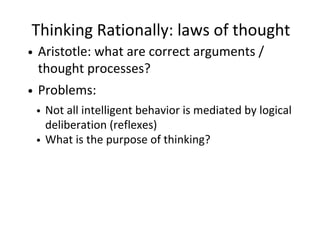
Thinking Rationally: lawsof thought
Aristotle: what are correct arguments /
thought processes?
Problems:
Not all intelligent behavior is mediated by logical
deliberation (reflexes)
What is the purpose of thinking?
16.
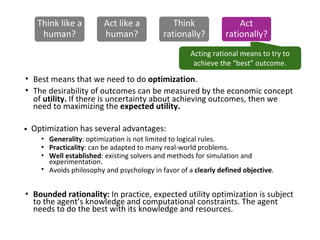
Acting rational meansto try to
achieve the “best” outcome.
•
•
•
Best means that we need to do optimization.
The desirability of outcomes can be measured by the economic concept
of utility. If there is uncertainty about achieving outcomes, then we
need to maximizing the expected utility.
Bounded rationality: In practice, expected utility optimization is subject
to the agent’s knowledge and computational constraints. The agent
needs to do the best with its knowledge and resources.
Optimization has several advantages:
•
•
•
•
Generality: optimization is not limited to logical rules.
Practicality: can be adapted to many real-world problems.
Well established: existing solvers and methods for simulation and
experimentation.
Avoids philosophy and psychology in favor of a clearly defined objective.
Think like a
human?
Act like a
human?
Think
rationally?
Act
rationally?
17.
Acting rationally
•
•
•
Rational behavior:doing the right thing
Need not always be deliberative
Aristotle (Nicomacheanethics)
–
–
Reflexive
Everyart andevery inquiry, and similarlyevery action
and every pursuit is thought to aim at some good.
18.
Acting → Thinking?
•WeakAI Hypothesis vs. Strong AI hypothesis
–
–
Weak Hyp: machines could act as if they are
intelligent
Strong Hyp: machines that act intelligent have to
think intelligently too
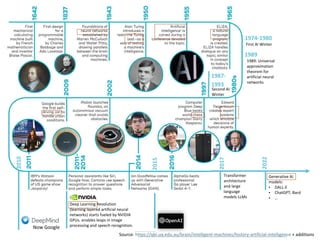
https : // qbi. uq. e du. a u/ bra in/ inte llig e nt- m a chine s / his tory - a rtif icia l- inte llig e nce
Source: https://qbi.uq.edu.au/brain/intelligent-machines/history-artificial-intelligence + additions
Deep Learning Revolution
(learning layered artificial neural
networks) starts fueled by NVIDIA
GPUs. enables leaps in image
processing and speech recognition.
Second AI
Winter
Transformer
architecture
and large
language
models LLMs
1989: Universal
approximation
theorem for
artificial neural
networks
Generative AI
models:
•
•
•
DALL-E
ChatGPT, Bard
…
2010
2017
2022
2015
1987-
1993
1974-1980
First AI Winter
1989
Now Google
21.
The State ofthe Art in Artificial
Intelligence
Overview of current AI capabilities and
progress
Based on Stanford’s AI100 initiative
Focus on technological, societal, and
application-level advances
22.
AI100: One HundredYear Study on AI
Led by Stanford University
Long-term assessment of AI progress and impact
Publishes expert reports and the AI Index at aiindex.org
Key Findings from AI100 (2016)
Rapid growth in AI applications
Impact areas: transport, healthcare, elder care
Need for ethical and democratic AI deployment
23.
Highlights from 2018and 2019 reports
compared to year 2000 baselines:
Growth in AI Research Publications
20-fold increase in AI papers (2010–2019)
Machine Learning dominates research output
Computer Vision and NLP follow
Public Sentiment and Ethics
70% AI news coverage is neutral
Positive sentiment rising rapidly
Key concerns: privacy and algorithmic bias
Education and Talent Growth
AI course enrollments growing rapidly
Most popular CS specialization worldwide
Strong industry demand for AI skills
Diversity in AI
80% male, 20% female professors
Similar trends in academia and industry
Highlights need for inclusivity
Conferences and Industry Expansion
NeurIPS attendance increased by 800%
AI startups in the U.S. increased 20-fold
Rapid commercialization of AI
Globalization of AI Research
China leads in paper volume
U.S. leads in citation impact
India among fastest-growing AI hiring nations
Vision and Language Advances
ImageNet accuracy surpasses human performance
NLP benchmarks exceed human-level scores
Major leap in perception and understanding
Human-Level Performance
Benchmarks
AI matches/exceeds humans in games and vision
Medical diagnosis performance comparable to experts
Shows task-specific intelligence
24.
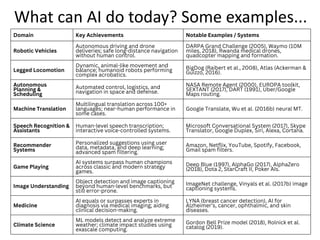
Domain Key AchievementsNotable Examples / Systems
Robotic Vehicles
Autonomous driving and drone
deliveries; safe long-distance navigation
without human control.
DARPA Grand Challenge (2005), Waymo (10M
miles, 2018), Rwanda medical drones,
quadcopter mapping and formation.
Legged Locomotion
Dynamic, animal-like movement and
balance; humanoid robots performing
complex acrobatics.
BigDog (Raibert et al., 2008), Atlas (Ackerman &
Guizzo, 2016).
Autonomous
Planning &
Scheduling
Automated control, logistics, and
navigation in space and defense.
NASA Remote Agent (2000), EUROPA toolkit,
SEXTANT (2017), DART (1991), Uber/Google
Maps routing.
Machine Translation
Multilingual translation across 100+
languages; near-human performance in
some cases.
Google Translate, Wu et al. (2016b) neural MT.
Speech Recognition &
Assistants
Human-level speech transcription;
interactive voice-controlled systems.
Microsoft Conversational System (2017), Skype
Translator, Google Duplex, Siri, Alexa, Cortana.
Recommender
Systems
Personalized suggestions using user
data, metadata, and deep learning;
advanced spam filtering.
Amazon, Netflix, YouTube, Spotify, Facebook,
Gmail spam filters.
Game Playing
AI systems surpass human champions
across classic and modern strategy
games.
Deep Blue (1997), AlphaGo (2017), AlphaZero
(2018), Dota 2, StarCraft II, Poker AIs.
Image Understanding
Object detection and image captioning
beyond human-level benchmarks, but
still error-prone.
ImageNet challenge, Vinyals et al. (2017b) image
captioning systems.
Medicine
AI equals or surpasses experts in
diagnosis via medical imaging; aiding
clinical decision-making.
LYNA (breast cancer detection), AI for
Alzheimer’s, cancer, ophthalmic, and skin
diseases.
Climate Science
ML models detect and analyze extreme
weather; climate impact studies using
exascale computing.
Gordon Bell Prize model (2018), Rolnick et al.
catalog (2019).
What can AI do today? Some examples...
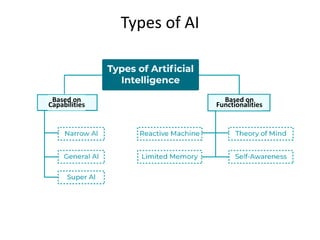
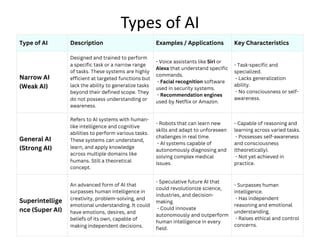
Type of AIDescription Examples / Applications Key Characteristics
Narrow AI
(Weak AI)
Designed and trained to perform
a specific task or a narrow range
of tasks. These systems are highly
efficient at targeted functions but
lack the ability to generalize tasks
beyond their defined scope. They
do not possess understanding or
awareness.
- Voice assistants like Siri or
Alexa that understand specific
commands.
- Facial recognition software
used in security systems.
- Recommendation engines
used by Netflix or Amazon.
- Task-specific and
specialized.
- Lacks generalization
ability.
- No consciousness or self-
awareness.
General AI
(Strong AI)
Refers to AI systems with human-
like intelligence and cognitive
abilities to perform various tasks.
These systems can understand,
learn, and apply knowledge
across multiple domains like
humans. Still a theoretical
concept.
- Robots that can learn new
skills and adapt to unforeseen
challenges in real time.
- AI systems capable of
autonomously diagnosing and
solving complex medical
issues.
- Capable of reasoning and
learning across varied tasks.
- Possesses self-awareness
and consciousness
(theoretically).
- Not yet achieved in
practice.
Superintellige
nce (Super AI)
An advanced form of AI that
surpasses human intelligence in
creativity, problem-solving, and
emotional understanding. It could
have emotions, desires, and
beliefs of its own, capable of
making independent decisions.
- Speculative future AI that
could revolutionize science,
industries, and decision-
making.
- Could innovate
autonomously and outperform
human intelligence in every
field.
- Surpasses human
intelligence.
- Has independent
reasoning and emotional
understanding.
- Raises ethical and control
concerns.
Types of AI
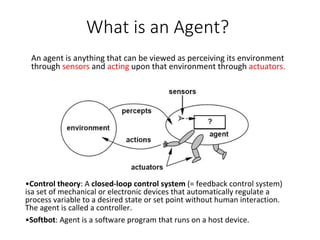
What is anAgent?
An agent is anything that can be viewed as perceiving its environment
through sensors and acting upon that environment through actuators.
•Control theory: A closed-loop control system (= feedback control system)
isa set of mechanical or electronic devices that automatically regulate a
process variable to a desired state or set point without human interaction.
The agent is called a controller.
•Softbot: Agent is a software program that runs on a host device.
31.
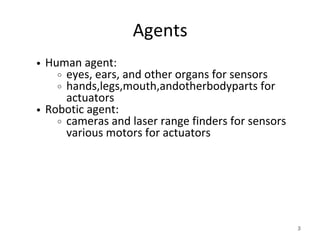
Agents
Human agent:
eyes, ears,and other organs for sensors
hands,legs,mouth,andotherbodyparts for
actuators
Robotic agent:
cameras and laser range finders for sensors
various motors for actuators
3
32.
Examples of Agents
•
•Softbots
Physically grounded agents
–
–
–
–
Expert Systems
IBM Watson
Intelligent buildings
Autonomous spacecraft
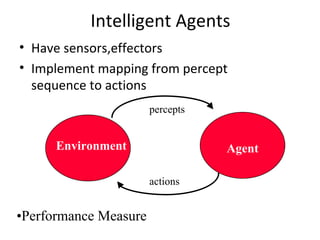
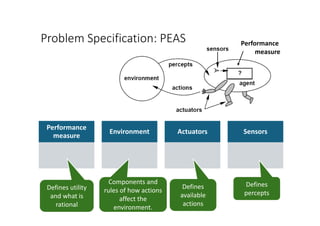
Components of anIntelligent Agent
Intelligent agents act
rationally in their
environment.
They need to
•
•
Optional
• Learn from experience to
improve performance.
Communicate with the
environment using
percepts and actions.
Represent knowledge,
reason and plan to achieve
a desired outcome. Agent interacting with the environment
[Artificial Intelligence: A Modern Approach, Editions 1-3]
Developer
35.
Rational Agents
An agentshould strive to do the right thing, based
on what it can perceive and the actions it can
perform. The right action is the one that will cause
the agent to be most successful.
Performance measure: An objective criterion for
success of an agent's behavior.
E.g., performance measure of a vacuum-cleaner
agent could be amount of dirt cleaned up, amount of
time taken, amount of electricity consumed, amount
of noise generated, etc.
36.
Ideal Rational Agent
Rationalityvsomniscience?
Acting in order to obtain valuable information
“For each possible percept sequence, does
whatever action is expected to maximize its
performance measure on the basis of evidence
perceived so far and built-in knowledge.''
37.
What is artificialintelligence (agent view)
Robotic agent:
An agent is anything that can be viewed as perceiving
its environment through sensors and acting upon that
environment through actuators
Human agent:
–
–
–
–
eyes, ears, and other organs for sensors
cameras andlaser range finders for sensors
various motors for actuators
hands,legs,mouth,andotherbodyparts for actuators
38.
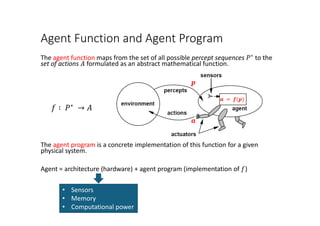
Agent Function andAgent Program
The agent function maps from the set of all possible percept sequences 𝑃𝑃∗
to the
set of actions 𝐴𝐴 formulated as an abstract mathematical function.
𝑓𝑓 ∶ 𝑃𝑃∗
→ 𝐴𝐴
The agent program is a concrete implementation of this function for a given
physical system.
Agent = architecture (hardware) + agent program (implementation of 𝑓𝑓)
• Sensors
• Memory
• Computational power
𝒂𝒂 = 𝒇𝒇(𝒑𝒑)
𝒂𝒂
𝒑𝒑
39.
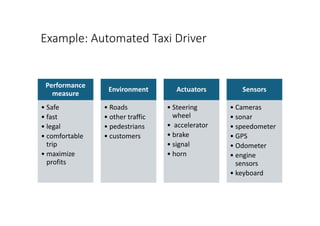
Example:
Vacuum-cleaner World
• Percepts:
Locationand status,
e.g., [A, Dirty]
• Actions:
Left, Right, Suck, NoOp
Implemented agent program:
function Vacuum-Agent( [location, status] )
returns an action 𝑎𝑎
if status = Dirty then return Suck
else if location = A then
return Right
else if location = B then
return Left
Agent function: 𝑓𝑓 ∶ 𝑃𝑃∗ → 𝐴𝐴
Percept Sequence Action
[A, Clean] Right
[A, Dirty] Suck
…
[A, Clean], [B, Clean] Left
…
[A, Clean], [B, Clean], [A, Dirty] Suck
…
Most recent
Percept 𝑝𝑝
Problem: This table can become infinitively large!
40.
Rational Agents: Whatis Good Behavior?
Foundation from normative moral theory and economics:
• Consequentialism: Evaluate actions by their consequences.
• Utilitarianism: Maximize happiness and well-being.
Definition of a rational agent:
“For each possible percept sequence, a rational agent should select an
action that maximizes its expected performance measure, given the
evidence provided by the percept sequence and the agent’s built-in
knowledge.”
• Performance measure: An objective criterion for success of an agent's
behavior (often called utility function or reward function).
• Expectation: Outcome averaged over all possible situations that may
arise.
Rule: Pick the action that maximize the expected utility
𝑎𝑎 = argmax𝑎𝑎∈A 𝐸𝐸 𝑈𝑈 𝑎𝑎)
41.
Rational Agents
This means:
•Rationality is an ideal – it implies that no one can build a better agent
• Rationality ≠ Omniscience – rational agents can make mistakes if percepts and
knowledge do not suffice to make a good decision
• Rationality ≠ Perfection – rational agents maximize expected outcomes not actual
outcomes
• It is rational to explore and learn – I.e., use percepts to supplement prior knowledge
and become autonomous
• Rationality is often bounded by available memory, computational power, available
sensors, etc.
Rule: Pick the action that maximize the expected utility
𝑎𝑎 = argmax𝑎𝑎∈A 𝐸𝐸 𝑈𝑈 𝑎𝑎)
42.
Example: Performance
Measure forthe
Vacuum-cleaner World
• Percepts:
Location and status,
e.g., [A, Dirty]
• Actions:
Left, Right, Suck, NoOp
Agent function:
Percept Sequence Action
[A, Clean] Right
[A, Dirty] Suck
…
[A, Clean], [B, Clean] Left
…
Implemented agent program:
function Vacuum-Agent( [location, status] )
returns an action
if status = Dirty then return Suck
else if location = A then return Right
else if location = B then return Left
What could be a performance measure?
Is this agent program rational?
43.
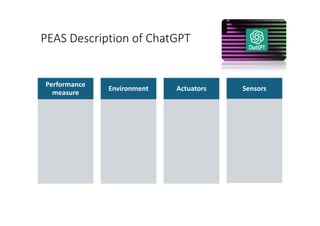
Problem Specification: PEASPerformance
measure
Performance
measure
Environment Actuators Sensors
Defines utility
and what is
rational
Components and
rules of how actions
affect the
environment.
Defines
available
actions
Defines
percepts
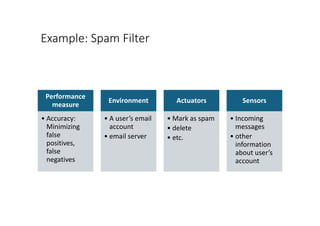
Example: Spam Filter
Performance
measure
•Accuracy:
Minimizing
false
positives,
false
negatives
Environment
• A user’s email
account
• email server
Actuators
• Mark as spam
• delete
• etc.
Sensors
• Incoming
messages
• other
information
about user’s
account
46.
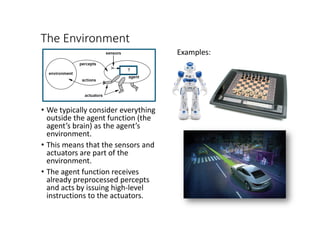
The Environment
• Wetypically consider everything
outside the agent function (the
agent’s brain) as the agent’s
environment.
• This means that the sensors and
actuators are part of the
environment.
• The agent function receives
already preprocessed percepts
and acts by issuing high-level
instructions to the actuators.
Examples:
47.
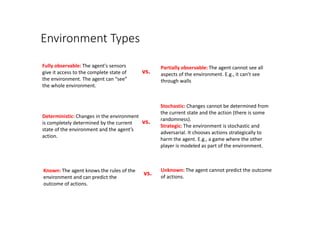
Environment Types
Fully observable:The agent's sensors
give it access to the complete state of
the environment. The agent can “see”
the whole environment.
vs.
Partially observable: The agent cannot see all
aspects of the environment. E.g., it can’t see
through walls
Deterministic: Changes in the environment
is completely determined by the current
state of the environment and the agent’s
action.
vs.
Stochastic: Changes cannot be determined from
the current state and the action (there is some
randomness).
Strategic: The environment is stochastic and
adversarial. It chooses actions strategically to
harm the agent. E.g., a game where the other
player is modeled as part of the environment.
Known: The agent knows the rules of the
environment and can predict the
outcome of actions.
vs. Unknown: The agent cannot predict the outcome
of actions.
48.
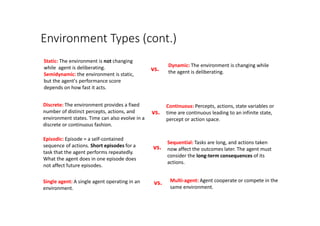
Environment Types (cont.)
Static:The environment is not changing
while agent is deliberating.
Semidynamic: the environment is static,
but the agent's performance score
depends on how fast it acts.
vs.
Dynamic: The environment is changing while
the agent is deliberating.
Discrete: The environment provides a fixed
number of distinct percepts, actions, and
environment states. Time can also evolve in a
discrete or continuous fashion.
vs.
Continuous: Percepts, actions, state variables or
time are continuous leading to an infinite state,
percept or action space.
Episodic: Episode = a self-contained
sequence of actions. Short episodes for a
task that the agent performs repeatedly.
What the agent does in one episode does
not affect future episodes.
vs.
Sequential: Tasks are long, and actions taken
now affect the outcomes later. The agent must
consider the long-term consequences of its
actions.
Single agent: A single agent operating in an
environment.
vs. Multi-agent: Agent cooperate or compete in the
same environment.
49.
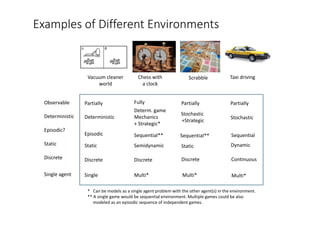
Examples of DifferentEnvironments
Observable
Deterministic
Episodic?
Static
Discrete
Single agent
* Can be models as a single agent problem with the other agent(s) in the environment.
** A single game would be sequential environment. Multiple games could be also
modeled as an episodic sequence of independent games.
Fully Partially Partially
Determ. game
Mechanics
+ Strategic*
Stochastic
+Strategic
Stochastic
Sequential** Sequential** Sequential
Semidynamic Dynamic
Static
Discrete Discrete Continuous
Multi* Multi* Multi*
Partially
Deterministic
Episodic
Static
Discrete
Single
Vacuum cleaner
world
Chess with
a clock
Scrabble Taxi driving
50.
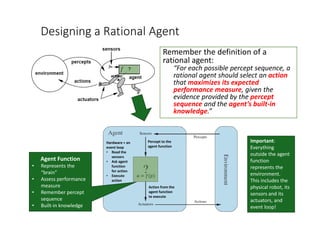
Designing a RationalAgent
Remember the definition of a
rational agent:
“For each possible percept sequence, a
rational agent should select an action
that maximizes its expected
performance measure, given the
evidence provided by the percept
sequence and the agent’s built-in
knowledge.”
𝑓𝑓
action
Percept to the
agent function
Action from the
agent function
to execute
𝑎𝑎 = 𝑓𝑓(𝑝𝑝)
Hardware + an
event loop
• Read the
sensors
• Ask agent
function
for action
• Execute
action
Agent Function
• Represents the
“brain”
• Assess performance
measure
• Remember percept
sequence
• Built-in knowledge
Important:
Everything
outside the agent
function
represents the
environment.
This includes the
physical robot, its
sensors and its
actuators, and
event loop!
Simple Reflex Agent
•Uses only built-in knowledge in the form of rules that select action only based
on the current percept. This is typically very fast!
• The agent does not know about the performance measure! But well-designed
rules can lead to good performance.
• The agent needs no memory and ignores all past percepts.
𝑎𝑎 = 𝑓𝑓(𝑝𝑝)
The interaction is a sequence: 𝑝𝑝0, 𝑎𝑎0, 𝑝𝑝1, 𝑎𝑎1, 𝑝𝑝2, 𝑎𝑎2, … 𝑝𝑝𝑡𝑡, 𝑎𝑎𝑡𝑡, …
Example: A simple vacuum cleaner that uses rules based on its current sensor input.
53.
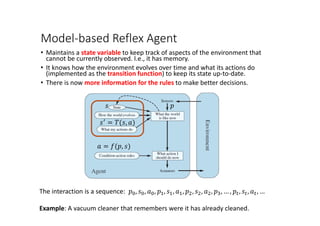
Model-based Reflex Agent
•Maintains a state variable to keep track of aspects of the environment that
cannot be currently observed. I.e., it has memory.
• It knows how the environment evolves over time and what its actions do
(implemented as the transition function) to keep its state up-to-date.
• There is now more information for the rules to make better decisions.
The interaction is a sequence: 𝑝𝑝0, 𝑠𝑠0, 𝑎𝑎0, 𝑝𝑝1, 𝑠𝑠1, 𝑎𝑎1, 𝑝𝑝2, 𝑠𝑠2, 𝑎𝑎2, 𝑝𝑝3, … , 𝑝𝑝𝑡𝑡, 𝑠𝑠𝑡𝑡, 𝑎𝑎𝑡𝑡, …
Example: A vacuum cleaner that remembers were it has already cleaned.
𝑎𝑎 = 𝑓𝑓(𝑝𝑝, 𝑠𝑠)
𝑠𝑠
𝑠𝑠′
= 𝑇𝑇(𝑠𝑠, 𝑎𝑎)
𝑝𝑝
54.
State Representation
States helpkeep track of the environment and the agent in it. This is often referred to
as the system state.
The representation can be:
• Atomic: Just a label for a black box. E.g., A, B
• Factored: A set of attribute values called fluents (because they model what can change).
E.g., [location = left, status = clean, temperature = 75 deg. F]
Variables describing
the system state are
called “fluents”
The set of all possible states is called the state space 𝑺𝑺. This set is typically very large!
Models a snapshot of
the current situation
Note: We often construct atomic labels from factored state representations. E.g.: If the
agent’s state is the location x = 7 and y = 3, then the atomic state label could be the
string “(7, 3)”. With the atomic representation, we can only compare if two labels are
the same. With the factored state representation, we have more information. E.g., we
can calculate the distance between the coordinates in two states.
55.
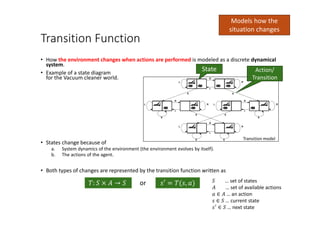
Transition Function
• Howthe environment changes when actions are performed is modeled as a discrete dynamical
system.
• Example of a state diagram
for the Vacuum cleaner world.
• States change because of
a. System dynamics of the environment (the environment evolves by itself).
b. The actions of the agent.
• Both types of changes are represented by the transition function written as
𝑇𝑇: 𝑆𝑆 × 𝐴𝐴 → 𝑆𝑆 or 𝑠𝑠𝑠 = 𝑇𝑇(𝑠𝑠, 𝑎𝑎) 𝑆𝑆 … set of states
𝐴𝐴 … set of available actions
𝑎𝑎 ∈ 𝐴𝐴 … an action
𝑠𝑠 ∈ 𝑆𝑆 … current state
𝑠𝑠′
∈ 𝑆𝑆 … next state
Models how the
situation changes
State Action/
Transition
Transition model
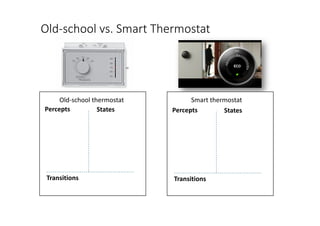
56.
Old-school vs. SmartThermostat
Old-school thermostat
Percepts States
Transitions
Smart thermostat
Percepts States
Transitions
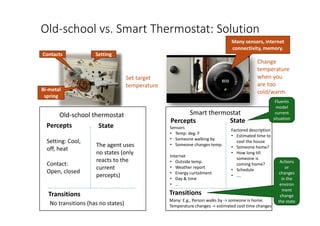
57.
Old-school vs. SmartThermostat: Solution
Set target
temperature
Many sensors, internet
connectivity, memory.
Change
temperature
when you
are too
cold/warm.
Old-school thermostat Smart thermostat
Setting
Contacts
Setting: Cool,
off, heat
Contact:
Open, closed
The agent uses
no states (only
reacts to the
current
percepts)
Sensors
• Temp: deg. F
• Someone walking by
• Someone changes temp.
Internet
• Outside temp.
• Weather report
• Energy curtailment
• Day & time
• …
Factored description
• Estimated time to
cool the house
• Someone home?
• How long till
someone is
coming home?
• Schedule
• ….
Bi-metal
spring
Percepts State
Transitions
No transitions (has no states)
Percepts State
Transitions
Many: E.g., Person walks by -> someone is home.
Temperature changes -> estimated cool time changes
Fluents
model
current
situation
Actions
or
changes
in the
environ
ment
change
the state
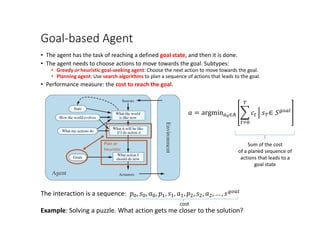
58.
Goal-based Agent
• Theagent has the task of reaching a defined goal state, and then it is done.
• The agent needs to choose actions to move towards the goal. Subtypes:
• Greedy or heuristic goal-seeking agent: Choose the next action to move towards the goal.
• Planning agent: Use search algorithms to plan a sequence of actions that leads to the goal.
• Performance measure: the cost to reach the goal.
𝑎𝑎 = argmin𝑎𝑎0∈A �
𝑡𝑡=0
𝑇𝑇
𝑐𝑐𝑡𝑡 � 𝑠𝑠𝑇𝑇∈ 𝑆𝑆𝑔𝑔𝑔𝑔𝑎𝑎𝑔𝑔
Sum of the cost
of a planed sequence of
actions that leads to a
goal state
The interaction is a sequence: 𝑝𝑝0, 𝑠𝑠0, 𝑎𝑎0, 𝑝𝑝1, 𝑠𝑠1, 𝑎𝑎1, 𝑝𝑝2, 𝑠𝑠2, 𝑎𝑎2, … , 𝑠𝑠𝑔𝑔𝑔𝑔𝑎𝑎𝑔𝑔
Example: Solving a puzzle. What action gets me closer to the solution?
cost
Plan or
heuristic
59.
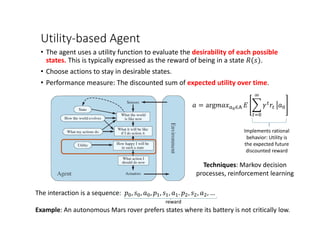
Utility-based Agent
• Theagent uses a utility function to evaluate the desirability of each possible
states. This is typically expressed as the reward of being in a state 𝑅𝑅(𝑠𝑠).
• Choose actions to stay in desirable states.
• Performance measure: The discounted sum of expected utility over time.
𝑎𝑎 = arg𝑚𝑚𝑎𝑎𝑚𝑚𝑎𝑎0∈A 𝐸𝐸 �
𝑡𝑡=0
∞
𝛾𝛾𝑡𝑡
𝑟𝑟𝑡𝑡 �𝑎𝑎0
Implements rational
behavior: Utility is
the expected future
discounted reward
Techniques: Markov decision
processes, reinforcement learning
reward
The interaction is a sequence: 𝑝𝑝0, 𝑠𝑠0, 𝑎𝑎0, 𝑝𝑝1, 𝑠𝑠1, 𝑎𝑎1. 𝑝𝑝2, 𝑠𝑠2, 𝑎𝑎2, …
Example: An autonomous Mars rover prefers states where its battery is not critically low.
60.
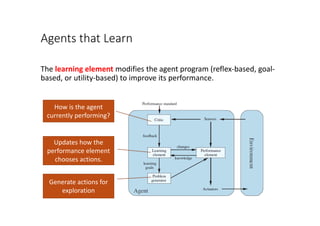
Agents that Learn
Thelearning element modifies the agent program (reflex-based, goal-
based, or utility-based) to improve its performance.
How is the agent
currently performing?
Updates how the
performance element
chooses actions.
Generate actions for
exploration
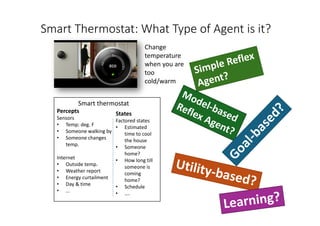
Smart Thermostat: WhatType of Agent is it?
Change
temperature
when you are
too
cold/warm
Smart thermostat
Percepts
Sensors
• Temp: deg. F
• Someone walking by
• Someone changes
temp.
Internet
• Outside temp.
• Weather report
• Energy curtailment
• Day & time
• …
States
Factored states
• Estimated
time to cool
the house
• Someone
home?
• How long till
someone is
coming
home?
• Schedule
• ….
63.
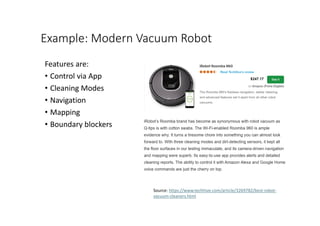
Example: Modern VacuumRobot
Features are:
• Control via App
• Cleaning Modes
• Navigation
• Mapping
• Boundary blockers
Source: https://www.techhive.com/article/3269782/best-robot-
vacuum-cleaners.html
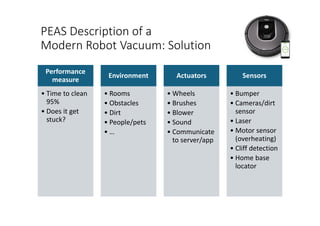
PEAS Description ofa
Modern Robot Vacuum: Solution
Performance
measure
• Time to clean
95%
• Does it get
stuck?
Environment
• Rooms
• Obstacles
• Dirt
• People/pets
• …
Actuators
• Wheels
• Brushes
• Blower
• Sound
• Communicate
to server/app
Sensors
• Bumper
• Cameras/dirt
sensor
• Laser
• Motor sensor
(overheating)
• Cliff detection
• Home base
locator
66.
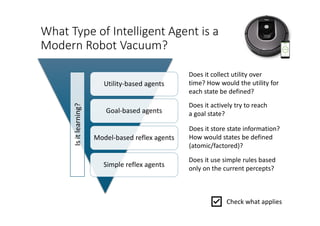
What Type ofIntelligent Agent is a
Modern Robot Vacuum?
Utility-based agents
Goal-based agents
Model-based reflex agents
Simple reflex agents
Does it collect utility over
time? How would the utility for
each state be defined?
Does it actively try to reach
a goal state?
Does it store state information?
How would states be defined
(atomic/factored)?
Does it use simple rules based
only on the current percepts?
Is
it
learning?
Check what applies
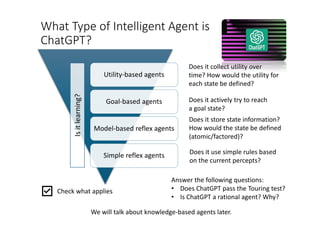
What Type ofIntelligent Agent is
ChatGPT?
Utility-based agents
Goal-based agents
Model-based reflex agents
Simple reflex agents
Does it collect utility over
time? How would the utility for
each state be defined?
Does it actively try to reach
a goal state?
Does it store state information?
How would the state be defined
(atomic/factored)?
Does it use simple rules based
on the current percepts?
Is
it
learning?
Answer the following questions:
• Does ChatGPT pass the Touring test?
• Is ChatGPT a rational agent? Why?
Check what applies
We will talk about knowledge-based agents later.
70.
Intelligent Systems a
Setsof Agents:
Self-driving Car
Utility-based agents
Goal-based agents
Model-based reflex agents
Simple reflex agents
Make sure the passenger has a pleasant drive
(not too much sudden breaking = utility)
Plan the route to the destination.
Remember where every other car is and
calculate where they will be in the next few
seconds.
React to unforeseen issues like a child
running in front of the car quickly.
It
should
learn!
High-level
planning
Low-level
planning
![What is artificial intelligence?
thought
vs.
behavior
human-like vs. rational
computers do things at
which, at the moment,
people are better” (Rich &
Knight 1991)
“[automation of] activities
that we associate with
human thinking, activities
such as decision making,
problem solving, learning…”
(Bellman 1978)
“The study of mental
faculties through the use of
computational models”
(Charniak& McDertmott
1985)
science that is concerned
with the automation of
intelligent behavior” (Luger &
Stubblefield 1993)
“The study of how to make “The branch of computer](https://image.slidesharecdn.com/unit1ai-260118140136-a6b05836/85/AI-artificial-intelligence-introduction-pdf-6-320.jpg)
![The Goal of AI
Think like a
human?
Act like a
human?
Think
rationally?
Act
rationally?
“Have machines solve problems that are challenging for humans.”
Narrow AI
How can we achieve this? Create an agent that can:
We call such a machine an intelligent agent.
•An intelligent
agent that can
solve a specific
problem.
E.g., drive a car or
play chess.
•A hypothetical
intelligent agent
which can
understand or
learn any
intellectual task
thathumanbeings
can.
•A hypothetical
intelligent agent
possessing
intelligence
surpassing that of
the brightest and
most gifted human
minds.
Artificial General
Intelligence (AGI)
[Wikipedia: AGI] [Wikipedia:
Superintelligence]
Artificial
Superintelligence](https://image.slidesharecdn.com/unit1ai-260118140136-a6b05836/85/AI-artificial-intelligence-introduction-pdf-8-320.jpg)

![Components of an Intelligent Agent
Intelligent agents act
rationally in their
environment.
They need to
•
•
Optional
• Learn from experience to
improve performance.
Communicate with the
environment using
percepts and actions.
Represent knowledge,
reason and plan to achieve
a desired outcome. Agent interacting with the environment
[Artificial Intelligence: A Modern Approach, Editions 1-3]
Developer](https://image.slidesharecdn.com/unit1ai-260118140136-a6b05836/85/AI-artificial-intelligence-introduction-pdf-34-320.jpg)
![Example:
Vacuum-cleaner World
• Percepts:
Location and status,
e.g., [A, Dirty]
• Actions:
Left, Right, Suck, NoOp
Implemented agent program:
function Vacuum-Agent( [location, status] )
returns an action 𝑎𝑎
if status = Dirty then return Suck
else if location = A then
return Right
else if location = B then
return Left
Agent function: 𝑓𝑓 ∶ 𝑃𝑃∗ → 𝐴𝐴
Percept Sequence Action
[A, Clean] Right
[A, Dirty] Suck
…
[A, Clean], [B, Clean] Left
…
[A, Clean], [B, Clean], [A, Dirty] Suck
…
Most recent
Percept 𝑝𝑝
Problem: This table can become infinitively large!](https://image.slidesharecdn.com/unit1ai-260118140136-a6b05836/85/AI-artificial-intelligence-introduction-pdf-39-320.jpg)
![Example: Performance
Measure for the
Vacuum-cleaner World
• Percepts:
Location and status,
e.g., [A, Dirty]
• Actions:
Left, Right, Suck, NoOp
Agent function:
Percept Sequence Action
[A, Clean] Right
[A, Dirty] Suck
…
[A, Clean], [B, Clean] Left
…
Implemented agent program:
function Vacuum-Agent( [location, status] )
returns an action
if status = Dirty then return Suck
else if location = A then return Right
else if location = B then return Left
What could be a performance measure?
Is this agent program rational?](https://image.slidesharecdn.com/unit1ai-260118140136-a6b05836/85/AI-artificial-intelligence-introduction-pdf-42-320.jpg)
![State Representation
States help keep track of the environment and the agent in it. This is often referred to
as the system state.
The representation can be:
• Atomic: Just a label for a black box. E.g., A, B
• Factored: A set of attribute values called fluents (because they model what can change).
E.g., [location = left, status = clean, temperature = 75 deg. F]
Variables describing
the system state are
called “fluents”
The set of all possible states is called the state space 𝑺𝑺. This set is typically very large!
Models a snapshot of
the current situation
Note: We often construct atomic labels from factored state representations. E.g.: If the
agent’s state is the location x = 7 and y = 3, then the atomic state label could be the
string “(7, 3)”. With the atomic representation, we can only compare if two labels are
the same. With the factored state representation, we have more information. E.g., we
can calculate the distance between the coordinates in two states.](https://image.slidesharecdn.com/unit1ai-260118140136-a6b05836/85/AI-artificial-intelligence-introduction-pdf-54-320.jpg)