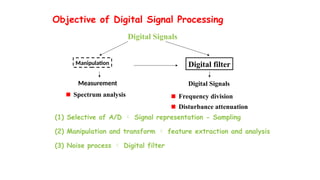
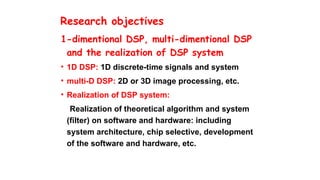
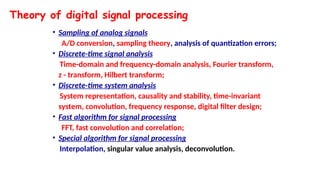
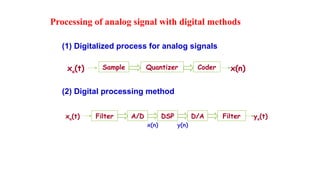
Digital Signal Processing (DSP) deals with the manipulation of discrete signals representing real-world information through a variety of applications. It is distinguished from analog systems by its versatility, repeatability, and the ability to handle signals in a precise and reprogrammable manner, addressing needs such as real-time processing and accuracy. DSP encompasses various operations including signal transformation, filtering, and analysis, and addresses challenges like quantization errors and aliased frequencies during the conversion from analog to digital forms.

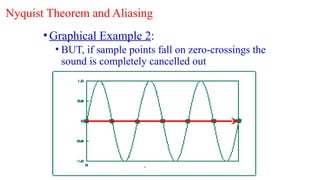
![Nyquist Theorem and Aliasing
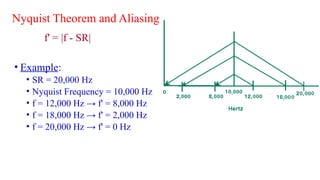
• Frequencies above Nyquist frequency "fold over"
to sound like lower frequencies.
• This fold over is called aliasing.
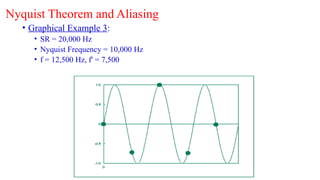
• Aliased frequency f in range [SR/2, SR] becomes
f':
f' = |f - SR|](https://image.slidesharecdn.com/advanceddigitalsignalprocessinglectu2-241012160540-c130e10e/85/Advanced_Digital_Signal_Processing_Lectu-2-pptx-31-320.jpg)