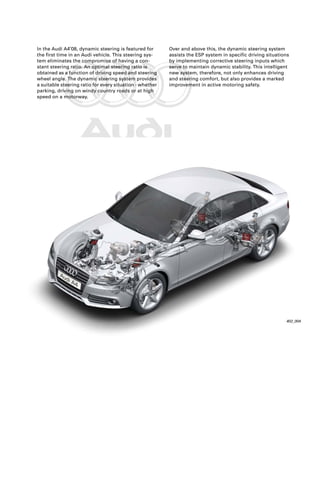
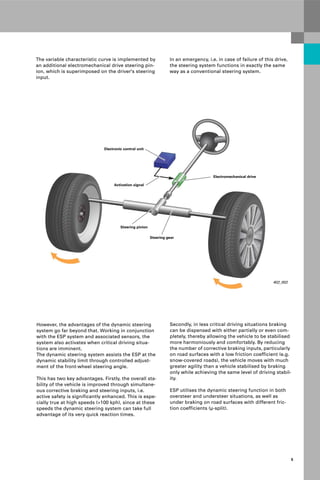
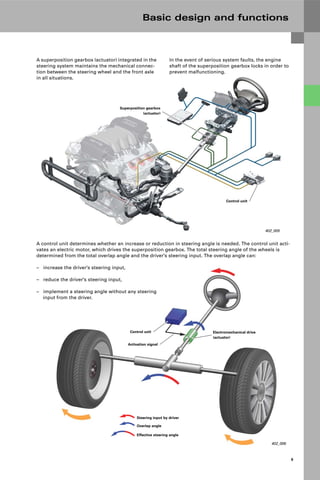
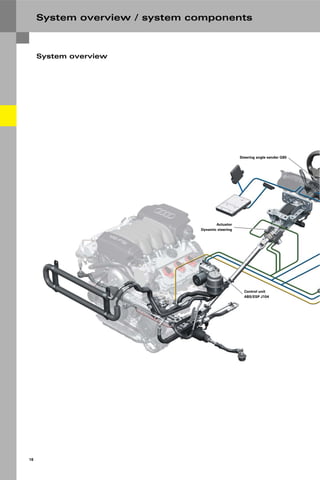
The document describes the dynamic steering system in the Audi A4'08. It provides optimal steering ratios for different driving speeds through an electromechanical actuator. It also assists ESP stability control by applying corrective steering inputs, improving stability and safety. The system enhances comfort while driving and improves agility by reducing the need for braking in some situations.