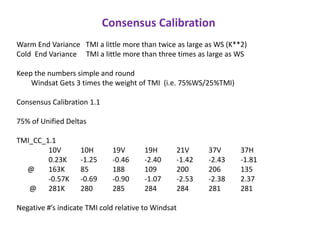
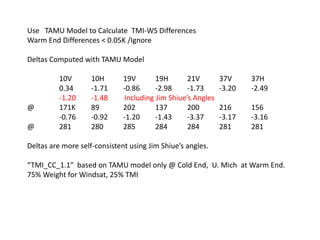
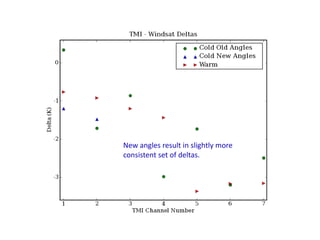
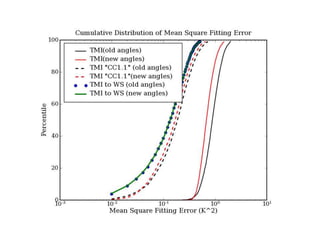
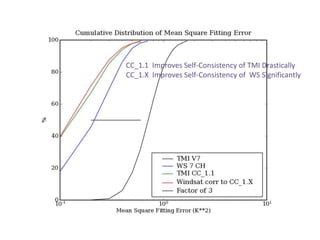
This document discusses efforts to create a consensus calibration between sensors to make their radiances physically consistent. It describes using multiple methods to generate recalibrations between sensors like TMI and Windsat. The current consensus calibration is based on TMI and Windsat, using TMI as the transfer standard with Windsat given 3 times the weight. This summary calibration is applied to other sensors like AMSR-E and SSM/I. The document also discusses plans to refine the consensus calibration further.