The document defines key concepts related to moments and forces, including:
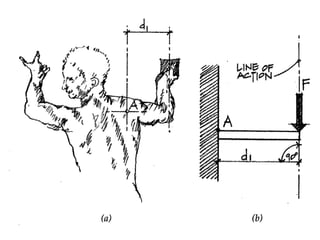
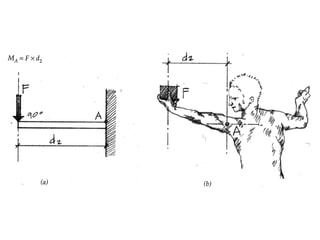
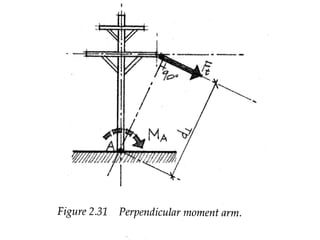
1) The moment of a force is the tendency of a force to produce rotation about an axis, and is equal to the force magnitude times the perpendicular distance to the axis (moment arm).
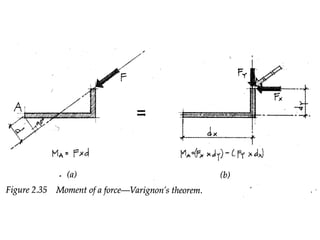
2) Varignon's theorem states the algebraic summation of force components about any point equals the moment of the original force.
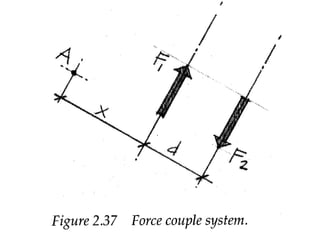
3) Two parallel forces of equal magnitude but opposite direction form a couple, which causes rotation about an axis perpendicular to its plane.
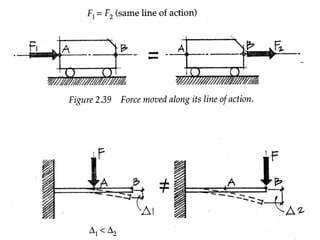
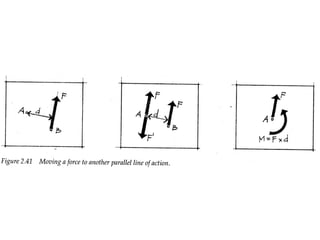
4) Forces can be resolved and moved to different points using the principle that the moment of any added couple must equal the original force times the distance of movement.






















































![Ctm 154[1]](https://cdn.slidesharecdn.com/ss_thumbnails/ctm1541-190506153756-thumbnail.jpg?width=640&height=640&fit=bounds)



















