Документ обсуждает методы реконструкции 3D моделей на основе многократных точек обзора, включая математику проекции и алгоритмы для позиционирования камер. Разбираются различные подходы, такие как метод средней точки, алгоритмы SFN и Voxel Coloring, а также их плюсы и минусы. В заключение представлены инструменты для работы с данными и контактная информация автора.




![Позиционируем камеру
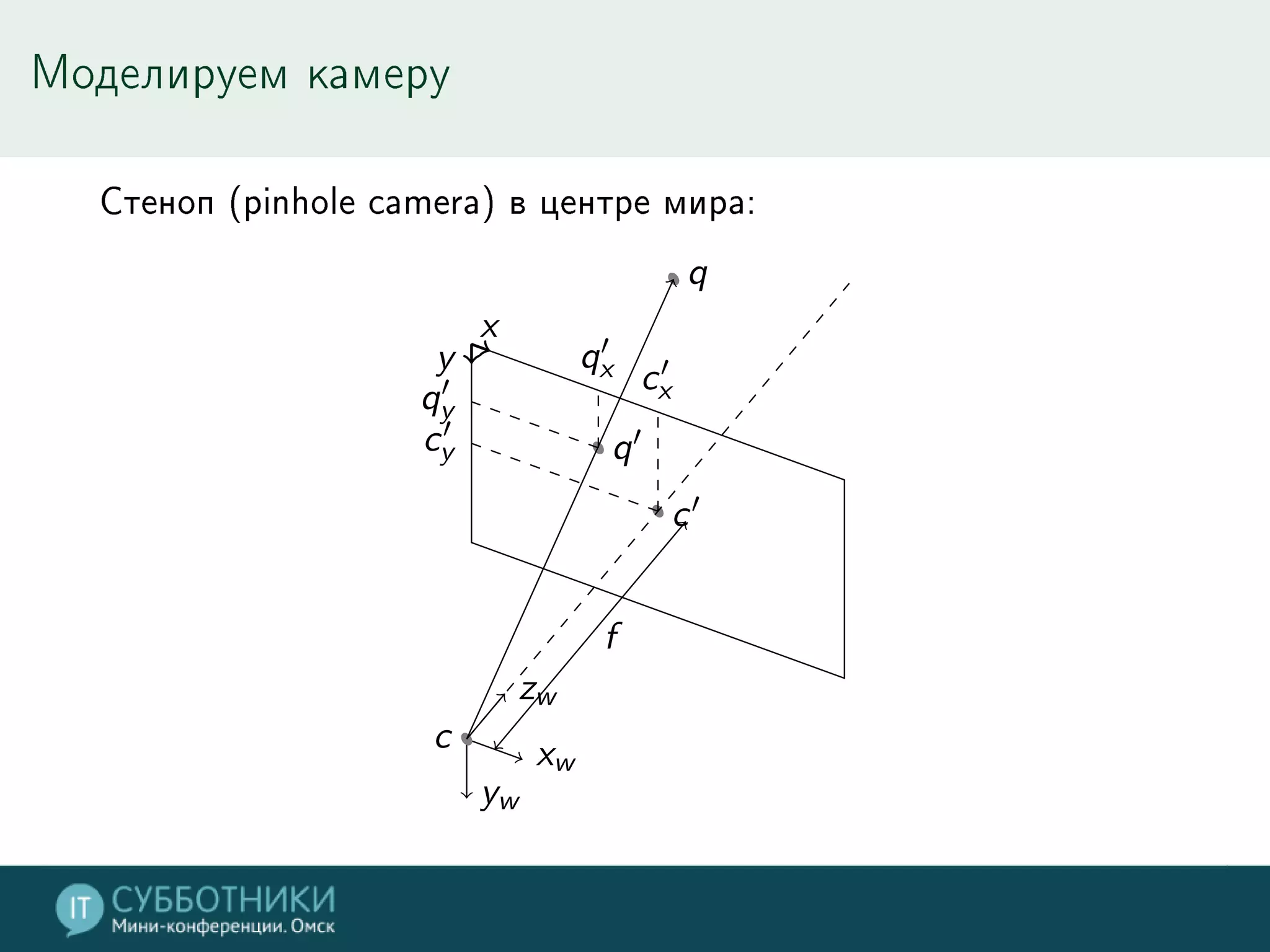
Уравнение проекции:
⎡
⎣
q′
x
q′
y
1
⎤
⎦ ≡ KRwT
c [I3| − tw
c ]
⎡
⎢
⎢
⎣
qx
qy
qz
1
⎤
⎥
⎥
⎦ (4)
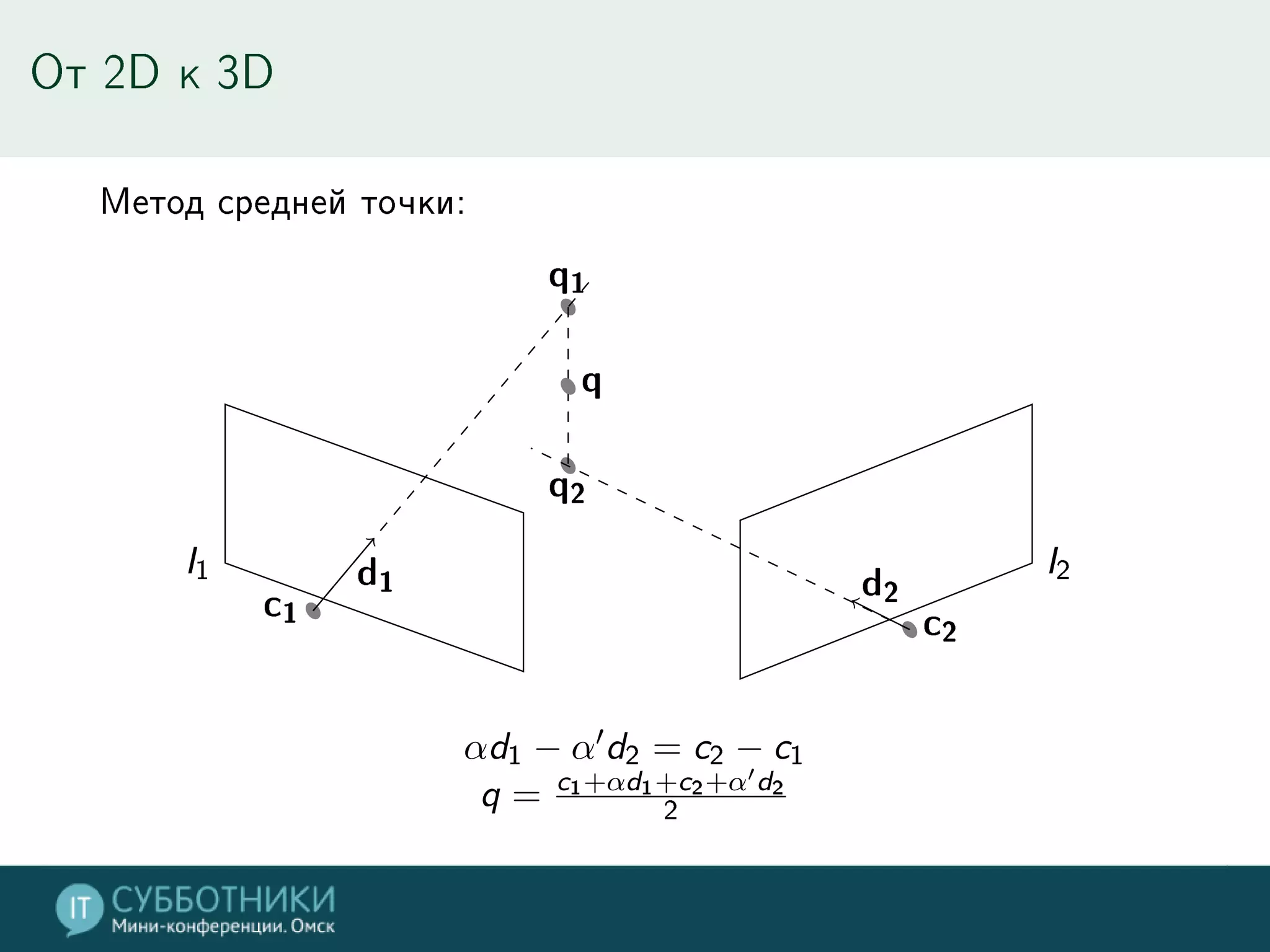
Обратная проекция:
⎡
⎣
d′
x
d′
y
d′
z
⎤
⎦ ≡ RwT
c K−1
⎡
⎣
q′
x
q′
y
1
⎤
⎦ (5)](https://image.slidesharecdn.com/2016-12-0301-161227112002/75/2016-12-03-01-2D-3D-9-2048.jpg)





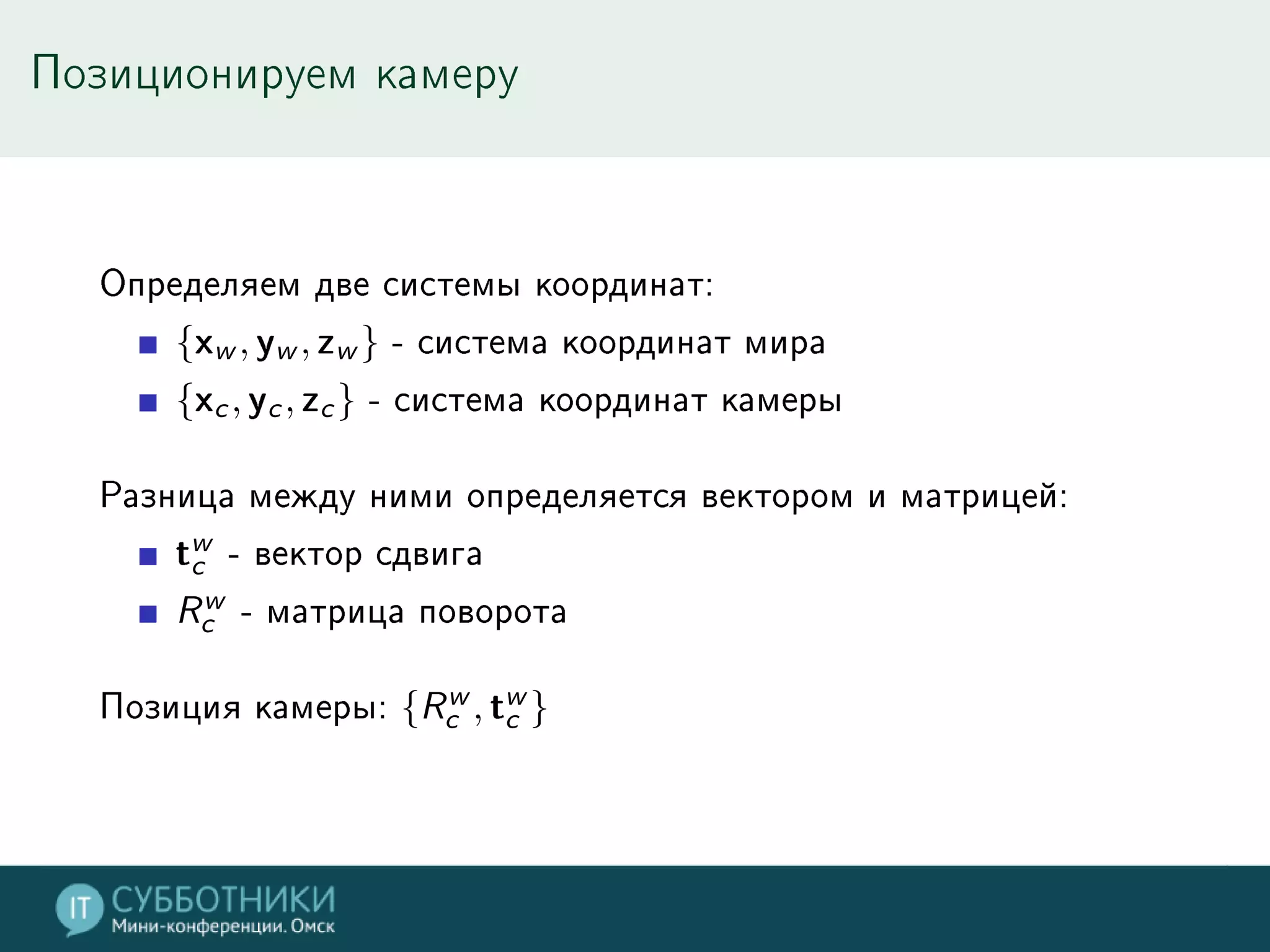
![Позиция камеры
1 Мы знаем 3D координаты некоторых
2 Мы знаем их 2D координаты в текущем изображении
3 Трех достаточно что-бы рассчитать позицию камеры
⎡
⎣
q′
x
q′
y
1
⎤
⎦ ≡ KRwT
c [I3| − tw
c ]
⎡
⎢
⎢
⎣
qx
qy
qz
1
⎤
⎥
⎥
⎦ (6)](https://image.slidesharecdn.com/2016-12-0301-161227112002/75/2016-12-03-01-2D-3D-18-2048.jpg)