Downloaded 26 times



























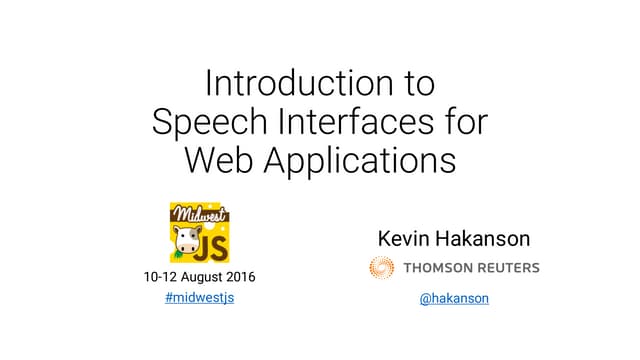
![navigator.getVRDisplays().then(function (displays) {
if (!displays.length) {
return Promise.reject("No display is found");
}
return displays.length[0];
}).catch(function (err) {
console.error('Could not get VRDisplays', err.stack);
});
VRディスプレイの検出](https://image.slidesharecdn.com/20160713-webvr-160713154127/85/20160713-webvr-30-320.jpg)



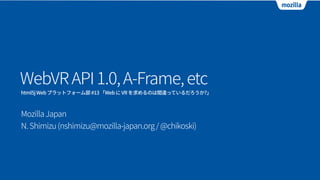
![vrDisplay.resetPose(); // 今の位置、向きを原点 / 起点に設定
var pose = vrDisplay.getPose(); // 姿勢の情報を取得
var timeStamp = pose.timestamp; // センサーから値が取得された時刻
var position = pose.position; // 位置を3次元ベクトルで取得
var orientation = pose.orientation; // 向きを4次元ベクトルで取得
var x = position[0], y = position[1], z = position[2];
センサーの値を取得(対応していない時は null が返る)](https://image.slidesharecdn.com/20160713-webvr-160713154127/85/20160713-webvr-35-320.jpg)







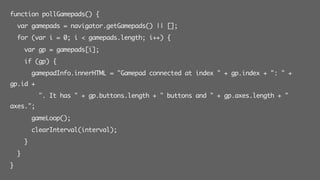
![function poseToMatrix (pose) {
var out = new Float32Array(16);
var q = pose.orientation ? pose.orientation : [0, 0, 0,
1];
var v = pose.position ? pose.position : [0, 0, 0];
// Compute some values for the quaternion math.
var x2 = q[0] + q[0];
var y2 = q[1] + q[1];
var z2 = q[2] + q[2];
var xx = q[0] * x2;
var xy = q[0] * y2;
var xz = q[0] * z2;
var yy = q[1] * y2;
var yz = q[1] * z2;
var zz = q[2] * z2;
var wx = q[3] * x2;
var wy = q[3] * y2;
var wz = q[3] * z2;
out[0] = 1 - (yy + zz);
out[1] = xy + wz;
out[2] = xz - wy;
out[3] = 0;
out[4] = xy - wz;
out[5] = 1 - (xx + zz);
out[6] = yz + wx;
out[7] = 0;
out[8] = xz + wy;
out[9] = yz - wx;
out[10] = 1 - (xx + yy);
out[11] = 0;
out[12] = v[0];
out[13] = v[1];
out[14] = v[2];
out[15] = 1;
return out;
}](https://image.slidesharecdn.com/20160713-webvr-160713154127/85/20160713-webvr-43-320.jpg)
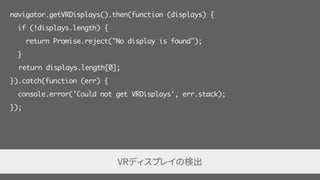
![function makeProjectionMatrix (display, eye) {
var d2r = Math.PI / 180.0;
var upTan = Math.tan(eye.fieldOfView.upDegrees * d2r);
var downTan = Math.tan(eye.fieldOfView.leftDegrees *
d2r);
var rightTan = Math.tan(eye.fieldOfView.rightDegrees *
d2r);
var leftTan = Math.tan(eye.fieldOfView.leftDegrees *
d2r);
var xScale = 2.0 / (leftTan + rightTan);
var yScale = 2.0 / (upTan + downTan);
var out = new Float32Array(16);
out[0] = xScale;
out[1] = 0.0;
out[2] = 0.0;
out[3] = 0.0;
out[4] = 0.0;
out[5] = yScale;
out[6] = 0.0;
out[7] = 0.0;
out[8] = -((leftTan - rightTan) * xScale * 0.5);
out[9] = (upTan - downTan) * yScale * 0.5;
out[10] = -(display.depthNear + display.depthFar) /
(display.depthFar - display.depthNear);
out[12] = 0.0;
out[13] = 0.0;
out[14] = -(2.0 * display.depthFar *
display.depthNear) / (display.depthFar -
display.depthNear);
out[15] = 0.0;
return out;
}](https://image.slidesharecdn.com/20160713-webvr-160713154127/85/20160713-webvr-44-320.jpg)












Mozilla's mission is to promote openness, innovation and opportunity on the web by making products like the Firefox browser that keep the power of the web in the hands of users everywhere. The document discusses Mozilla's mission and provides information on developing virtual reality experiences using the WebVR API and tools like A-Frame for building VR scenes and interfaces in HTML. It includes code samples and links to documentation for using the WebVR API in Firefox and other browsers.