Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Shinichiro Isago
2,793 views
デブサミ2013【15D-3】Azureセッション資料
デブサミ2013資料【15-D-3】Azureエバンジェリストが大企業マイクロソフトの中でとってきたAction!の軌跡
Technology
◦
Read more
19
Save
Share
Embed
Embed presentation
Download
Downloaded 87 times
1
/ 51
2
/ 51
3
/ 51
4
/ 51
5
/ 51
6
/ 51
7
/ 51
8
/ 51
9
/ 51
10
/ 51
11
/ 51
12
/ 51
13
/ 51
14
/ 51
15
/ 51
16
/ 51
17
/ 51
18
/ 51
19
/ 51
20
/ 51
21
/ 51
22
/ 51
23
/ 51
24
/ 51
25
/ 51
26
/ 51
27
/ 51
28
/ 51
29
/ 51
30
/ 51
31
/ 51
32
/ 51
33
/ 51
34
/ 51
35
/ 51
36
/ 51
37
/ 51
38
/ 51
39
/ 51
40
/ 51
41
/ 51
42
/ 51
43
/ 51
44
/ 51
45
/ 51
46
/ 51
47
/ 51
48
/ 51
49
/ 51
50
/ 51
51
/ 51
More Related Content
PDF
Developers Summit 2013【15-B-6】開発者の "資産形成" につながる Action とは?
by
インフラジスティックス・ジャパン株式会社
PDF
人が作るソフトウェア 〜今組織パターンを読む意味〜
by
Yukei Wachi
PDF
【15-e-7】Kinectから始まったスタートアップ #devsumi
by
Kaoru NAKAMURA
PDF
Developers Summit 2013【15-B-8】タブレット進化論
by
Akio Hoshi
PDF
Devsumi2013 Ruby開発者のみなさん、mrubyで楽しく快適な組み込みアプリ開発を始めませんか?
by
Takashi Sogabe
PDF
反復型ソフトウェア開発の勘所
by
Yoshifumi Tsuda
PDF
15 c5 dad
by
Noriyuki Egi
PDF
Devsumi2013_15-c-7 アドテク・ターゲティング技術
by
Yuichi Ota
Developers Summit 2013【15-B-6】開発者の "資産形成" につながる Action とは?
by
インフラジスティックス・ジャパン株式会社
人が作るソフトウェア 〜今組織パターンを読む意味〜
by
Yukei Wachi
【15-e-7】Kinectから始まったスタートアップ #devsumi
by
Kaoru NAKAMURA
Developers Summit 2013【15-B-8】タブレット進化論
by
Akio Hoshi
Devsumi2013 Ruby開発者のみなさん、mrubyで楽しく快適な組み込みアプリ開発を始めませんか?
by
Takashi Sogabe
反復型ソフトウェア開発の勘所
by
Yoshifumi Tsuda
15 c5 dad
by
Noriyuki Egi
Devsumi2013_15-c-7 アドテク・ターゲティング技術
by
Yuichi Ota
What's hot
PDF
【15-B-1】AmazonのDevOpsを支えるAWSクラウド
by
Yasuhiro Horiuchi
PDF
無償でここまで使えるアドビのWeb制作ツール for デブサミ2013
by
Keisuke Todoroki
PPTX
モバイル&コンシューマ向けのシステム開発ができるPHP&Javaプログラマの皆様へ
by
ekushida
PDF
Open dataとハッカソンで変わる世界
by
Hal Seki
PDF
Devsumi2013 15-C-1 実践!スマホアプリのマネタイズ!! ~マーケット把握術と iPhone&Androidプログラミングテクニック~
by
Masahiro Hidaka
PDF
MY JOB WEND TO VIETNUM? DevSumi ver.
by
Ryo Amano
PDF
【14-E-7】Technology Enterprise Development「悪ふざけに関する真面目な話」
by
Kent Ishizawa
PDF
Barcode-punk
by
Tsutomu Kawamura
PDF
Ricoh UCS for iPad でみる エンタープライズ アジャイル開発
by
Naoki Umehara
PPTX
夏サミ2013 基調講演 「DevOpsは開発現場とビジネスの間に何を生むか?」(新野淳一氏)
by
Developers Summit
PDF
夏サミ2013【A1】基礎からわかるDevOps
by
Developers Summit
PDF
Enterpriseでもモバイル開発
by
Mitch Okamoto
PDF
夏サミ 2013 A2 セッション資料 #natsumiA2
by
智治 長沢
PDF
DevOps at ChatWork
by
Masaki Yamamoto
PDF
Agile Japan 2010 「変化を受け入れるアジャイルなプロジェクトマネジメントと現場 <ツール・環境篇>」
by
Yusuke Suzuki
PDF
でぶさみ夏2013 キーノート オレンジレンジャーの資料
by
Tomohiro Fujii
PDF
[devsumi2013]【15-D-7】実演!現場の悩みをTOCfEで考え抜く!
by
tocfebootcamp
PDF
ウェブブラウザの時代は終わるのか 〜スマホアプリとHTML5の未来〜
by
Kazuho Oku
PDF
【16-E-4】残業ゼロで開発スピードが10倍に!もう元の開発体制には戻れないデンソー流のアジャイル開発
by
Developers Summit
【15-B-1】AmazonのDevOpsを支えるAWSクラウド
by
Yasuhiro Horiuchi
無償でここまで使えるアドビのWeb制作ツール for デブサミ2013
by
Keisuke Todoroki
モバイル&コンシューマ向けのシステム開発ができるPHP&Javaプログラマの皆様へ
by
ekushida
Open dataとハッカソンで変わる世界
by
Hal Seki
Devsumi2013 15-C-1 実践!スマホアプリのマネタイズ!! ~マーケット把握術と iPhone&Androidプログラミングテクニック~
by
Masahiro Hidaka
MY JOB WEND TO VIETNUM? DevSumi ver.
by
Ryo Amano
【14-E-7】Technology Enterprise Development「悪ふざけに関する真面目な話」
by
Kent Ishizawa
Barcode-punk
by
Tsutomu Kawamura
Ricoh UCS for iPad でみる エンタープライズ アジャイル開発
by
Naoki Umehara
夏サミ2013 基調講演 「DevOpsは開発現場とビジネスの間に何を生むか?」(新野淳一氏)
by
Developers Summit
夏サミ2013【A1】基礎からわかるDevOps
by
Developers Summit
Enterpriseでもモバイル開発
by
Mitch Okamoto
夏サミ 2013 A2 セッション資料 #natsumiA2
by
智治 長沢
DevOps at ChatWork
by
Masaki Yamamoto
Agile Japan 2010 「変化を受け入れるアジャイルなプロジェクトマネジメントと現場 <ツール・環境篇>」
by
Yusuke Suzuki
でぶさみ夏2013 キーノート オレンジレンジャーの資料
by
Tomohiro Fujii
[devsumi2013]【15-D-7】実演!現場の悩みをTOCfEで考え抜く!
by
tocfebootcamp
ウェブブラウザの時代は終わるのか 〜スマホアプリとHTML5の未来〜
by
Kazuho Oku
【16-E-4】残業ゼロで開発スピードが10倍に!もう元の開発体制には戻れないデンソー流のアジャイル開発
by
Developers Summit
Viewers also liked
PPTX
最新!Windows Azure Platformアプリケーション開発
by
Tatsuaki Sakai
PPTX
Windows Azure
by
Microsoft Openness Japan
PDF
デブサミ20130215
by
Shunsuke Nogami
PDF
デブサミ2013 【15-B-2】iOS/Android向け開発をビジュアルに!
by
hmimura_embarcadero
PDF
Microsoft Azure超超入門_20140412
by
Sayaka Shimada
PDF
[SendGridローンチイベント] パブリック クラウド プラットフォーム「Windows Azure」
by
Naoki (Neo) SATO
PDF
大規模スマートフォンサービス開発の世界 〜無料通話アプリcommの現場から〜
by
Ichito Nagata
PPT
Chef on azure
by
東 哲平
PPTX
Microsoft Azure vs Amazon Web Services (AWS) Services & Feature Mapping
by
Ilyas F ☁☁☁
最新!Windows Azure Platformアプリケーション開発
by
Tatsuaki Sakai
Windows Azure
by
Microsoft Openness Japan
デブサミ20130215
by
Shunsuke Nogami
デブサミ2013 【15-B-2】iOS/Android向け開発をビジュアルに!
by
hmimura_embarcadero
Microsoft Azure超超入門_20140412
by
Sayaka Shimada
[SendGridローンチイベント] パブリック クラウド プラットフォーム「Windows Azure」
by
Naoki (Neo) SATO
大規模スマートフォンサービス開発の世界 〜無料通話アプリcommの現場から〜
by
Ichito Nagata
Chef on azure
by
東 哲平
Microsoft Azure vs Amazon Web Services (AWS) Services & Feature Mapping
by
Ilyas F ☁☁☁
Similar to デブサミ2013【15D-3】Azureセッション資料
PDF
基調講演「データのグループウェア化」
by
Cybozucommunity
PDF
Smartphoneseminar orso_sakamoto
by
Yoshichika Sakamoto
PDF
Voicepic@FukuiMASeminar
by
Manabu Shimobe
PDF
【配布用】20120411スターター資料スマホアプリご導入までの流れ
by
DHRgroup
PDF
Summit 2013 Wrap-Up
by
Keisuke Anzai
PDF
201210_オンデマンドコマースによるマネタイズ
by
Satoshi Kyoda
PPTX
201203 smb Facebook Cloud
by
Yuichi Morito
PDF
パソナプレゼン資料
by
Daisuke Imai
PDF
Agile 459 | 11/17 資料
by
智治 長沢
PDF
2011年マイクロソフト テクノロジー振り返り~開発編~
by
Takeshi Shinmura
PDF
今日から業務で使える17の運用系Linuxツール、そして円環の理
by
Masahito Zembutsu
PDF
smartphone test (know how & tools)
by
Yukio Andoh
PDF
VDI最前線!ワークスタイルの未来像を探る ~いつでも、どこでも、どんなデバイスでも~
by
Nissho-Blocks
KEY
Android連携ハードウェア
by
Akira Sasaki
KEY
テックヒルズ
by
tomo tsubota
PDF
挑戦の道具としてのチケット駆動開発(長編版)
by
Makoto SAKAI
PDF
コミュニティで歴史をつくろう!
by
Noriyuki Koide
PDF
[AWS Summit 2012] 事例セッション #2 Bascule Meets AWS! クラウドが加速させる デジタルクリエイションの世界
by
Amazon Web Services Japan
PDF
AWS SUMMIT TOKYO 2012 - BASCULE SESSION
by
Mariko Nishimura
PDF
モバイルビジネスの動向
by
Hidetoshi Mori
基調講演「データのグループウェア化」
by
Cybozucommunity
Smartphoneseminar orso_sakamoto
by
Yoshichika Sakamoto
Voicepic@FukuiMASeminar
by
Manabu Shimobe
【配布用】20120411スターター資料スマホアプリご導入までの流れ
by
DHRgroup
Summit 2013 Wrap-Up
by
Keisuke Anzai
201210_オンデマンドコマースによるマネタイズ
by
Satoshi Kyoda
201203 smb Facebook Cloud
by
Yuichi Morito
パソナプレゼン資料
by
Daisuke Imai
Agile 459 | 11/17 資料
by
智治 長沢
2011年マイクロソフト テクノロジー振り返り~開発編~
by
Takeshi Shinmura
今日から業務で使える17の運用系Linuxツール、そして円環の理
by
Masahito Zembutsu
smartphone test (know how & tools)
by
Yukio Andoh
VDI最前線!ワークスタイルの未来像を探る ~いつでも、どこでも、どんなデバイスでも~
by
Nissho-Blocks
Android連携ハードウェア
by
Akira Sasaki
テックヒルズ
by
tomo tsubota
挑戦の道具としてのチケット駆動開発(長編版)
by
Makoto SAKAI
コミュニティで歴史をつくろう!
by
Noriyuki Koide
[AWS Summit 2012] 事例セッション #2 Bascule Meets AWS! クラウドが加速させる デジタルクリエイションの世界
by
Amazon Web Services Japan
AWS SUMMIT TOKYO 2012 - BASCULE SESSION
by
Mariko Nishimura
モバイルビジネスの動向
by
Hidetoshi Mori
More from Shinichiro Isago
PDF
Twilio Meetup Tokyo 2015 Microsoft 講演資料「開発コミュニティでアイディアと仲間を見つけよう!ハッカソンから技術系スター...
by
Shinichiro Isago
PDF
Microsoft Azureでソーシャルゲームを作ってみた話(前半)
by
Shinichiro Isago
PDF
CommunityOpenDay2012名古屋セッション資料
by
Shinichiro Isago
PDF
JAZUG仙台#1勉強会
by
Shinichiro Isago
PDF
Jazug静岡勉強会資料
by
Shinichiro Isago
PDF
MashupAward7 Microsoft Presentation
by
Shinichiro Isago
PDF
StartupWeekend Tokyo WindowsAzure
by
Shinichiro Isago
PDF
10分でわかる!ZガンダムとAzure
by
Shinichiro Isago
PDF
WindowsAzureで女子力アップ
by
Shinichiro Isago
PDF
Activities for 311 earthquake around Azure
by
Shinichiro Isago
PDF
東北クラウド実践カンファレンス2011
by
Shinichiro Isago
PDF
Heroshima "Cloud & Security Day" and Night
by
Shinichiro Isago
PDF
FukuokaCloud_Azure
by
Shinichiro Isago
PDF
20101018 JJUG CCC10 WindowsAzure
by
Shinichiro Isago
PDF
ShizuokaITpro_Azure
by
Shinichiro Isago
PDF
XDev2010 WindowsAzure
by
Shinichiro Isago
PDF
Lightning Talk Tips
by
Shinichiro Isago
PDF
クラウド勉強会in北陸Azure資料
by
Shinichiro Isago
PDF
Secpolo#4 WindowsAzure Security
by
Shinichiro Isago
PDF
わんくま東京勉強会#46 Azureセッション資料
by
Shinichiro Isago
Twilio Meetup Tokyo 2015 Microsoft 講演資料「開発コミュニティでアイディアと仲間を見つけよう!ハッカソンから技術系スター...
by
Shinichiro Isago
Microsoft Azureでソーシャルゲームを作ってみた話(前半)
by
Shinichiro Isago
CommunityOpenDay2012名古屋セッション資料
by
Shinichiro Isago
JAZUG仙台#1勉強会
by
Shinichiro Isago
Jazug静岡勉強会資料
by
Shinichiro Isago
MashupAward7 Microsoft Presentation
by
Shinichiro Isago
StartupWeekend Tokyo WindowsAzure
by
Shinichiro Isago
10分でわかる!ZガンダムとAzure
by
Shinichiro Isago
WindowsAzureで女子力アップ
by
Shinichiro Isago
Activities for 311 earthquake around Azure
by
Shinichiro Isago
東北クラウド実践カンファレンス2011
by
Shinichiro Isago
Heroshima "Cloud & Security Day" and Night
by
Shinichiro Isago
FukuokaCloud_Azure
by
Shinichiro Isago
20101018 JJUG CCC10 WindowsAzure
by
Shinichiro Isago
ShizuokaITpro_Azure
by
Shinichiro Isago
XDev2010 WindowsAzure
by
Shinichiro Isago
Lightning Talk Tips
by
Shinichiro Isago
クラウド勉強会in北陸Azure資料
by
Shinichiro Isago
Secpolo#4 WindowsAzure Security
by
Shinichiro Isago
わんくま東京勉強会#46 Azureセッション資料
by
Shinichiro Isago
デブサミ2013【15D-3】Azureセッション資料
1.
Developers Summit
3.
これまでの軌跡 •
Azureのビジョンに惹かれマイクロソフトにエバンジェリストとして入社 • 数々のイベントを構成作家的立場で演出 • ブログ、twitter、Facebookなどを積極活用 • AWS、GAEなどとクラウド黎明期を盛り立てる • アワード受賞 • 戦力不足を自覚して仲間を召喚 • JAZUG創立支援、Azure MVPs擁立 • おばかアプリ選手権やインストールマニアックスを通じた出会い • プロジェクトAZUMAP • クラウド・ガールを企画、原作、プロデュース • モバイル向けコンテンツ配信ビジネスの立ち上げ • ソーシャル領域でのビジネスの立ち上げ • Mashup Awardなどを通じたWeb方面の市場開拓 • VCと連携したスタートアップ企業支援 • コミケ出展 • スマート XXプロジェクト
4.
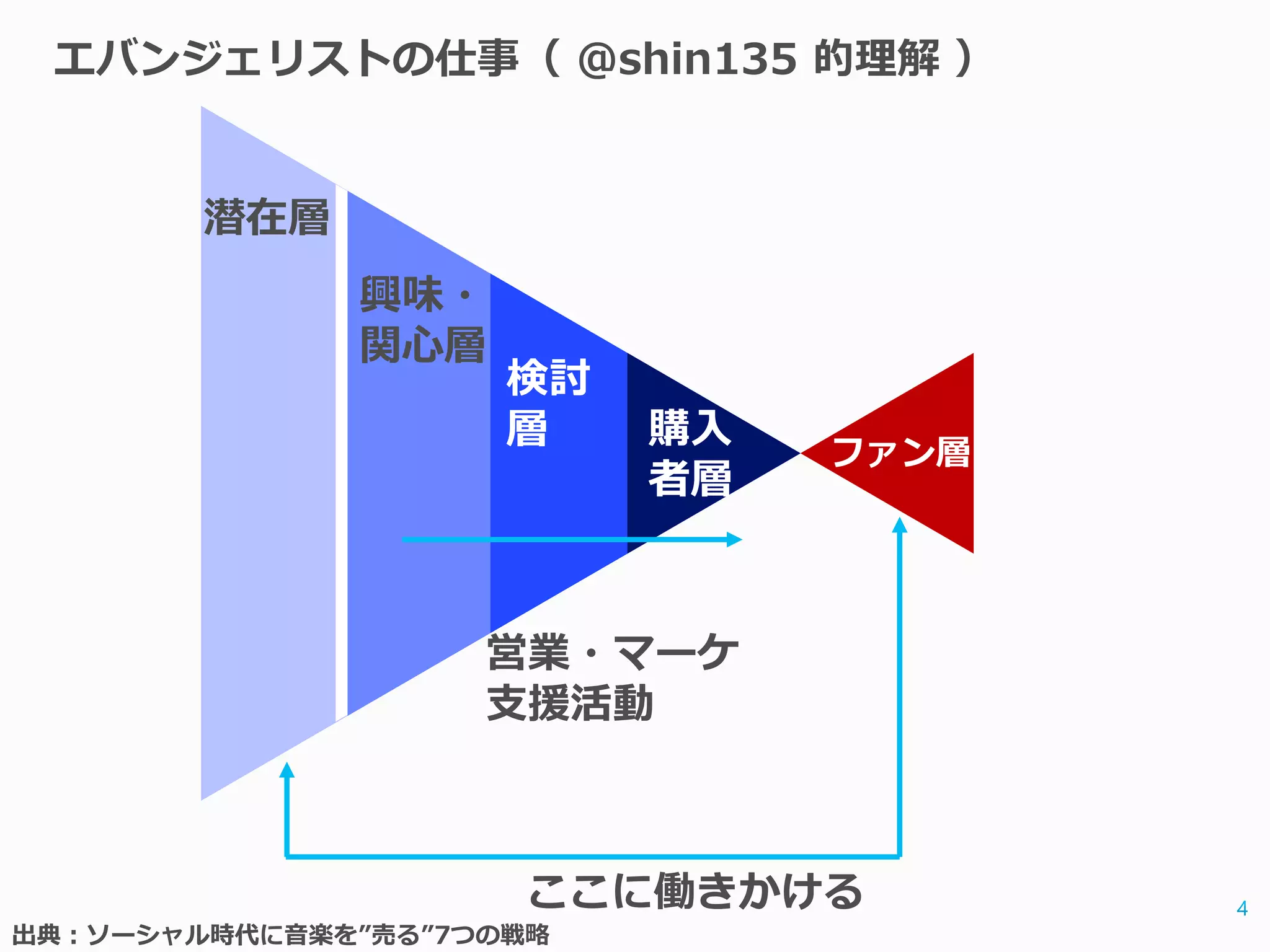
エバンジェリストの仕事( @shin135 的理解
) 潜在層 興味・ 関心層 検討 層 購入 ファン層 者層 営業・マーケ 支援活動 ここに働きかける 出典:ソーシャル時代に音楽を”売る”7つの戦略
5.
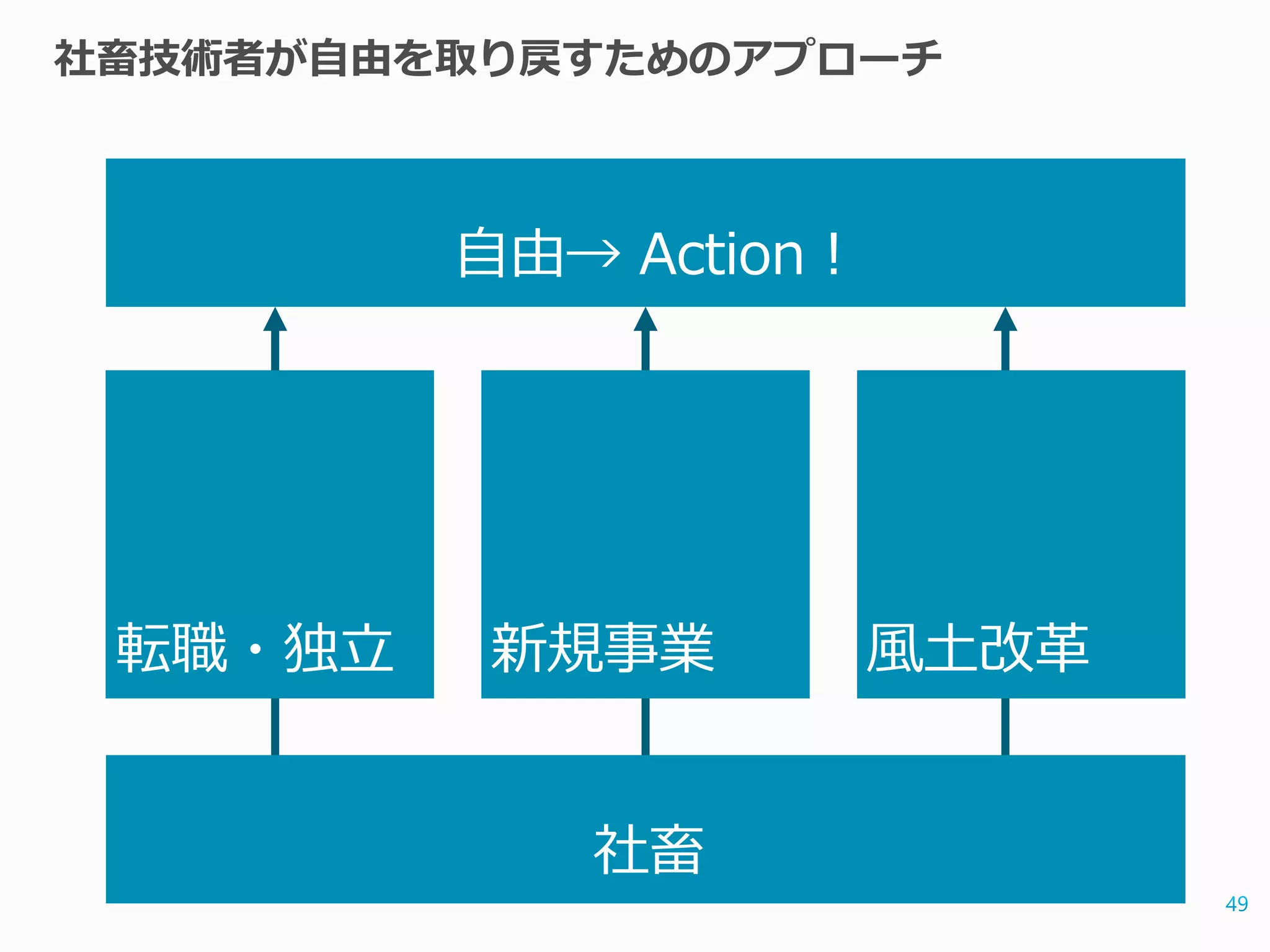
社畜技術者が自由を取り戻すためのアプローチ
6.
リア充な方はコチラのコンテンツをお楽しみください
7.
エンジニアな皆様は開発裏話も是非!
9.
ブース対応 コミケ55万人来場で企業ブースも人通りが絶えることはなく、マイクロソフトブースも アンケートは待機列ができ最大で30分以上の待ち時間となった
10.
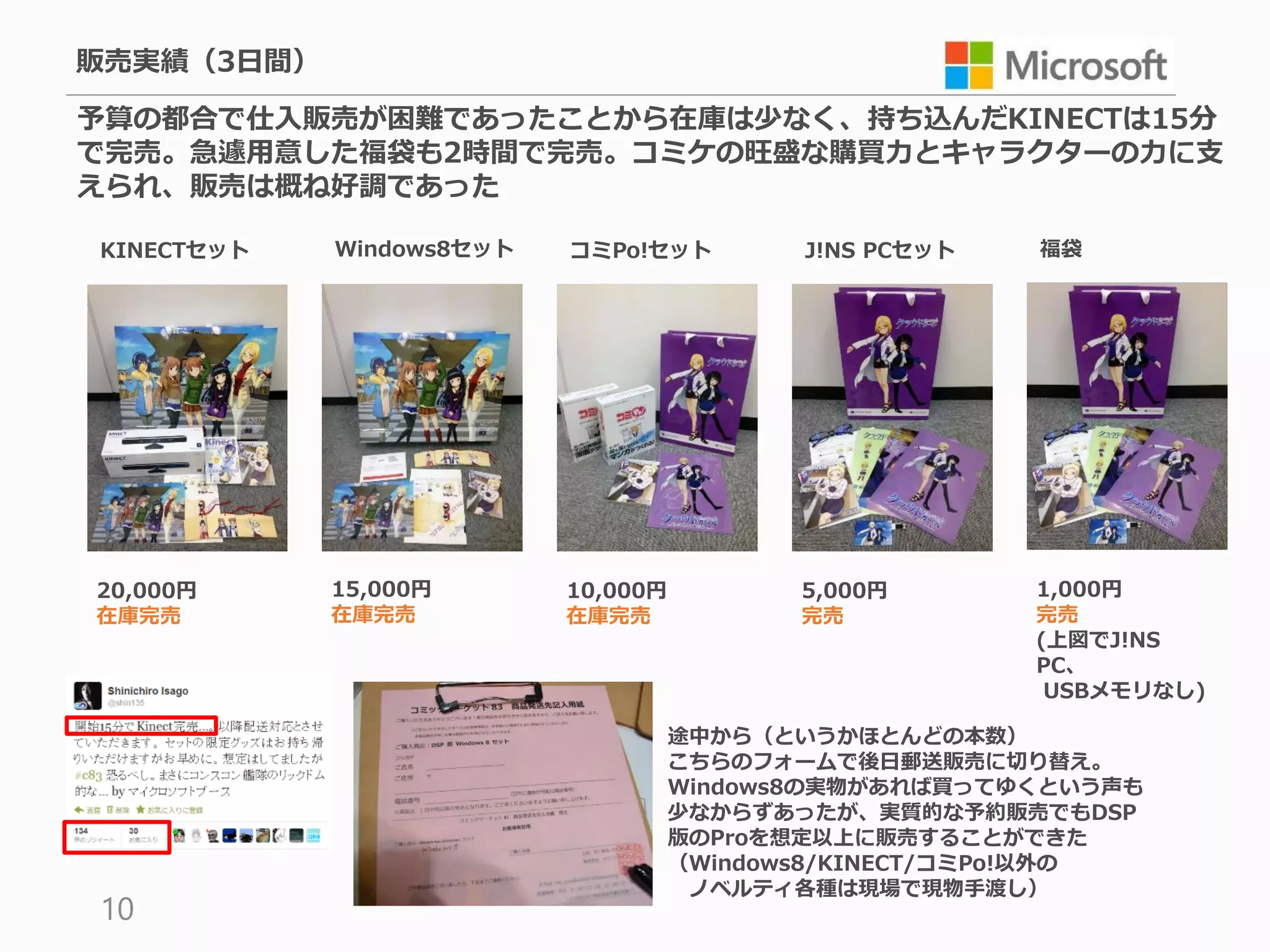
販売実績(3日間) 予算の都合で仕入販売が困難であったことから在庫は少なく、持ち込んだKINECTは15分 で完売。急遽用意した福袋も2時間で完売。コミケの旺盛な購買力とキャラクターの力に支 えられ、販売は概ね好調であった KINECTセット
Windows8セット コミPo!セット J!NS PCセット 福袋 20,000円 15,000円 10,000円 5,000円 1,000円 在庫完売 在庫完売 在庫完売 完売 完売 (上図でJ!NS PC、 USBメモリなし) 途中から(というかほとんどの本数) こちらのフォームで後日郵送販売に切り替え。 Windows8の実物があれば買ってゆくという声も 少なからずあったが、実質的な予約販売でもDSP 版のProを想定以上に販売することができた (Windows8/KINECT/コミPo!以外の ノベルティ各種は現場で現物手渡し) 10
12.
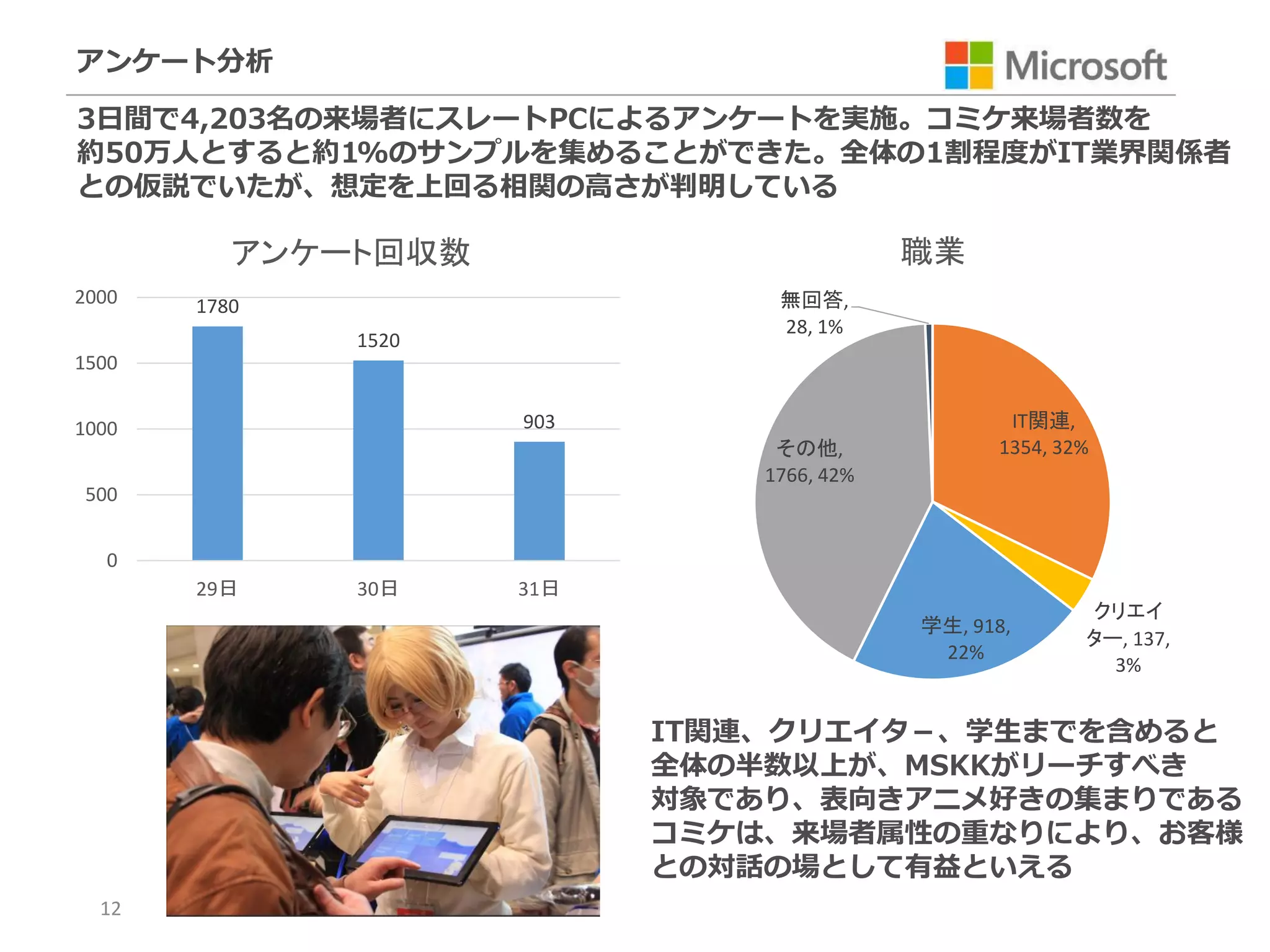
アンケート分析 3日間で4,203名の来場者にスレートPCによるアンケートを実施。コミケ来場者数を 約50万人とすると約1%のサンプルを集めることができた。全体の1割程度がIT業界関係者 との仮説でいたが、想定を上回る相関の高さが判明している
アンケート回収数 職業 2000 1780 無回答, 28, 1% 1520 1500 1000 903 IT関連, その他, 1354, 32% 1766, 42% 500 0 29日 30日 31日 クリエイ 学生, 918, ター, 137, 22% 3% IT関連、クリエイタ-、学生までを含めると 全体の半数以上が、MSKKがリーチすべき 対象であり、表向きアニメ好きの集まりである コミケは、来場者属性の重なりにより、お客様 との対話の場として有益といえる 12
13.
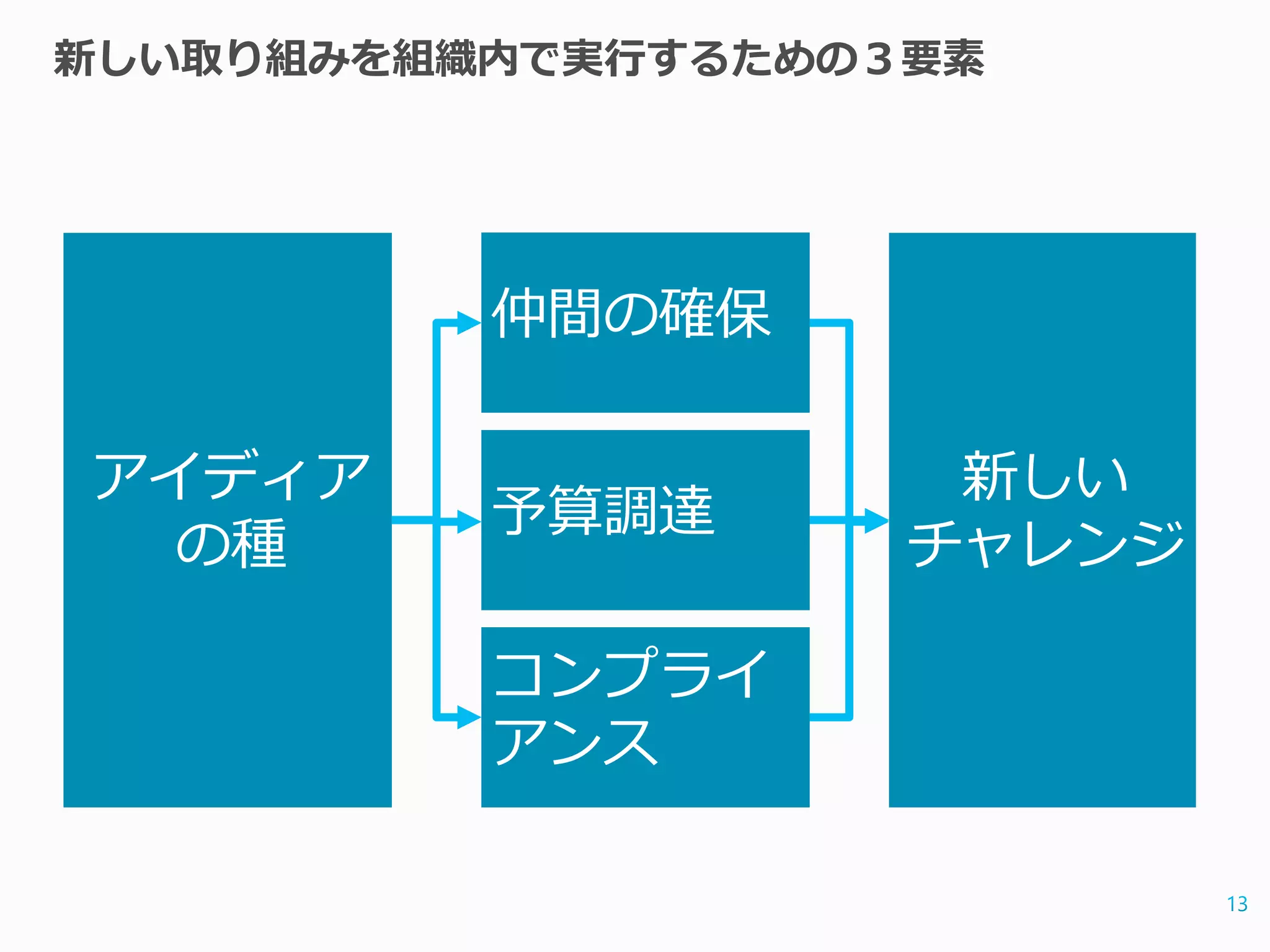
新しい取り組みを組織内で実行するための3要素
14.
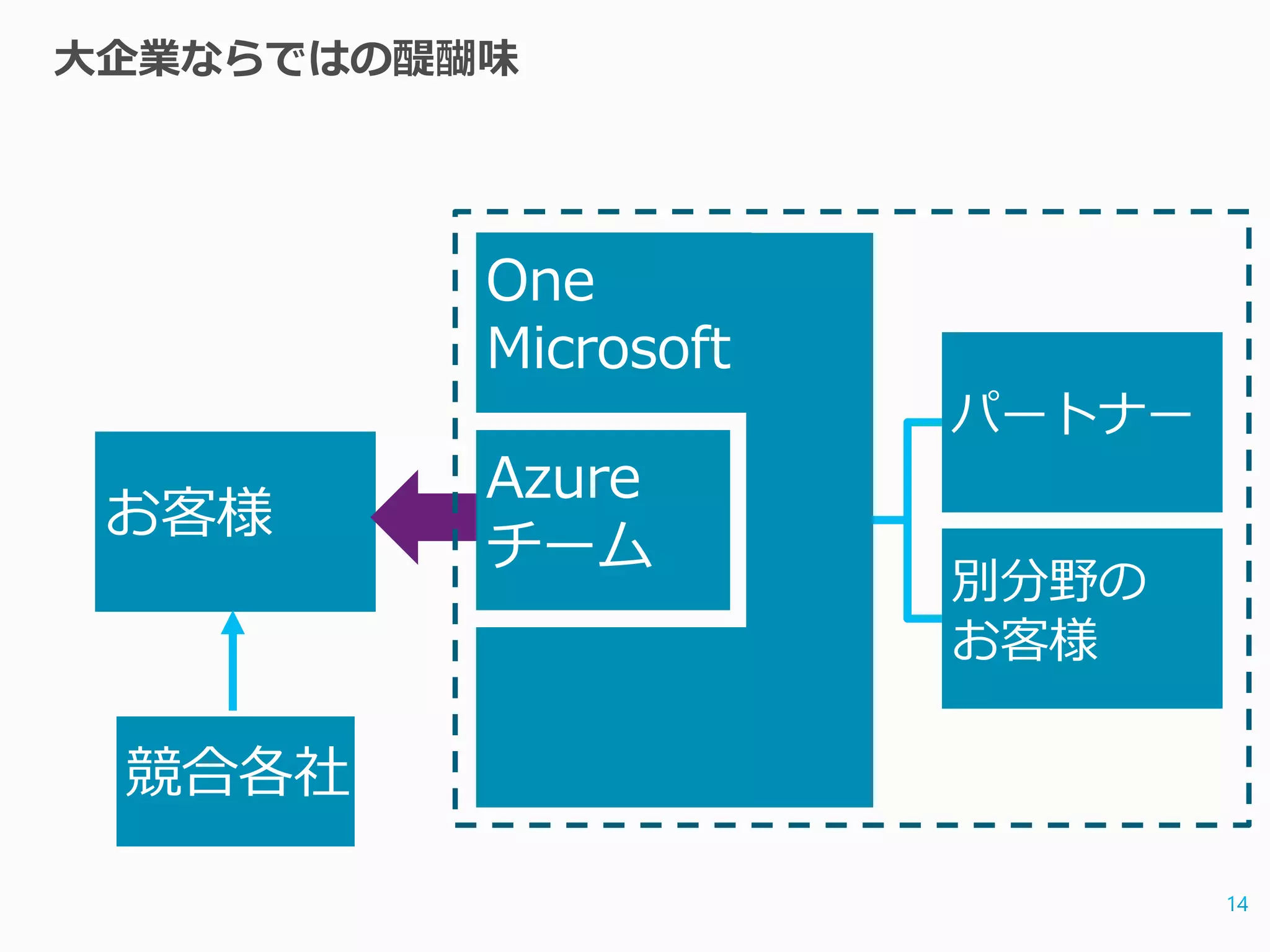
大企業ならではの醍醐味
15.
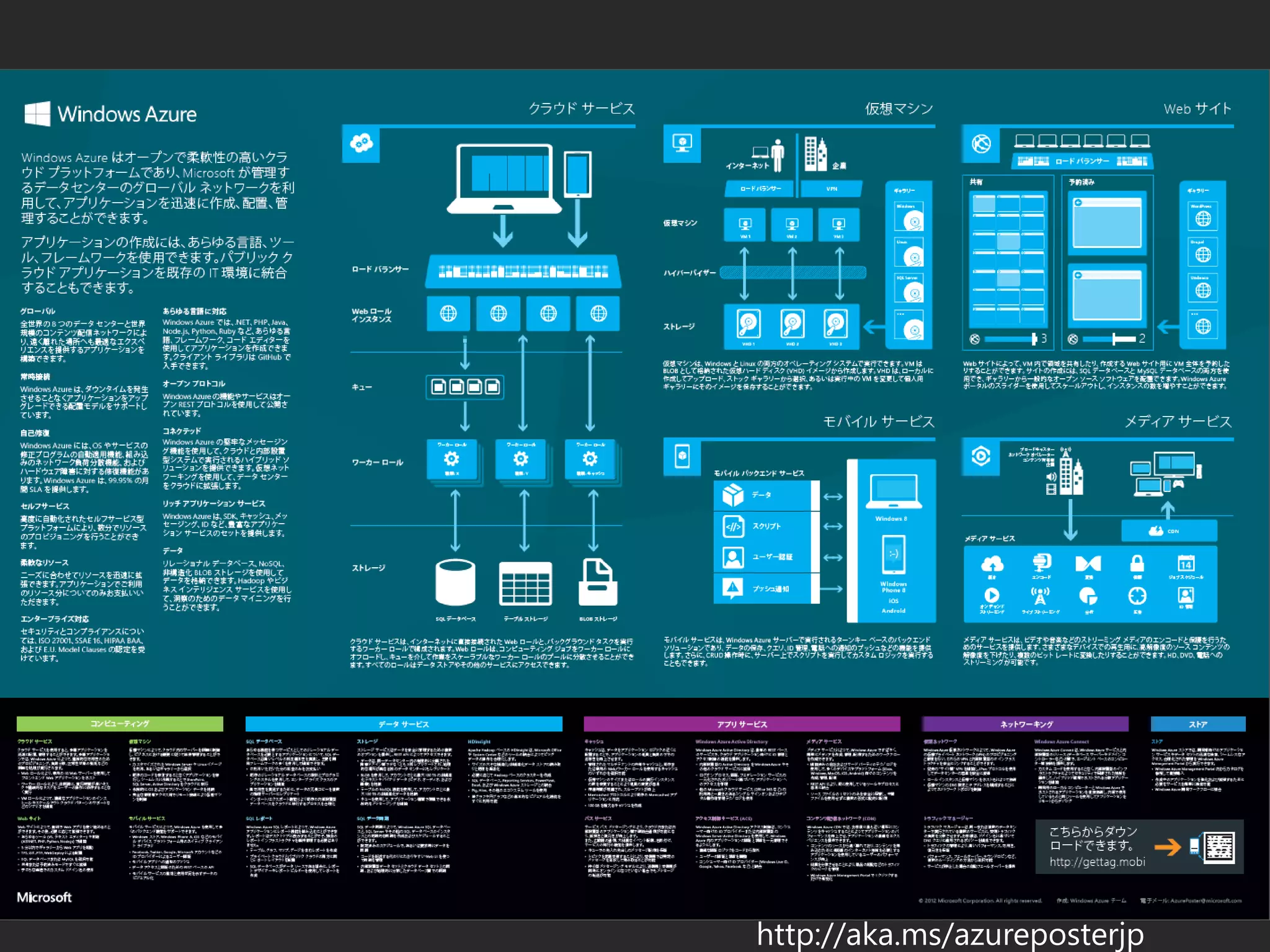
http://aka.ms/azureposterjp
21.
http://www.windowsazure.com/mobile
モバイル対応の アプリを簡単に実装 ユーザー認証機能 プッシュ通知機能 瞬時にデプロイ可能 マルチテナント環境 から専用環境に 必要に応じて変更可能 Windows 8, iOS, Android, Windows Phone 8 をサポート予定 必要に応じて 機能を追加可能
22.
noriyuki.koide@kddi-web.com
小出範幸
23.
Twilioについて • ウェブと電話を繋ぐAPI(プラットフォーム提供)
アプリケーション (要開発)
24.
Twilioの主な機能
電話番号の購入(050) voice オーディオ再生&合成音声 (電話回線接続) 電話会議(カンファレンス) 通話録音 待ち呼コントロール (VoIP接続) 世界対応 など
25.
デモ①:匿名通話
電話網 電話網 プッシュ[1]→接続&会話 プッシュ[2]→サウンド再生 プッシュ[3]→切断 デモアプリ
26.
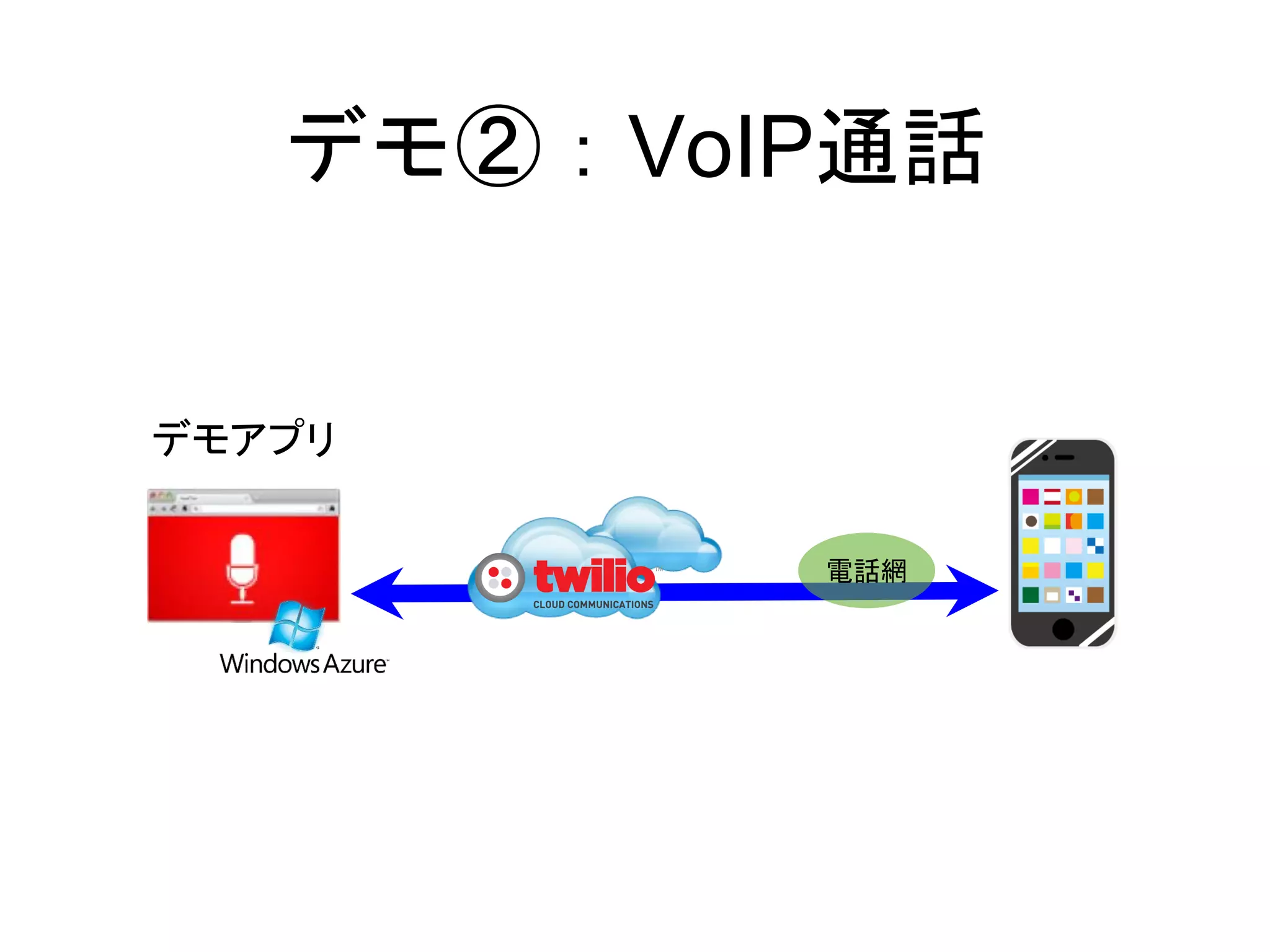
デモ②:VoIP通話 デモアプリ
電話網
27.
デモ③:みんなで試そう!
[1]・・・ [2]・・・ [3]・・・ [4]・・・ 電話網 みなさん 050-3133-1502
28.
スマートコミュニケーション
• 電話とソフトウェアを結んだ、感 動的な経験
29.
何が変わる? • たとえば、
電話とスマホを行ったり来たりしながら情報提供 powered by
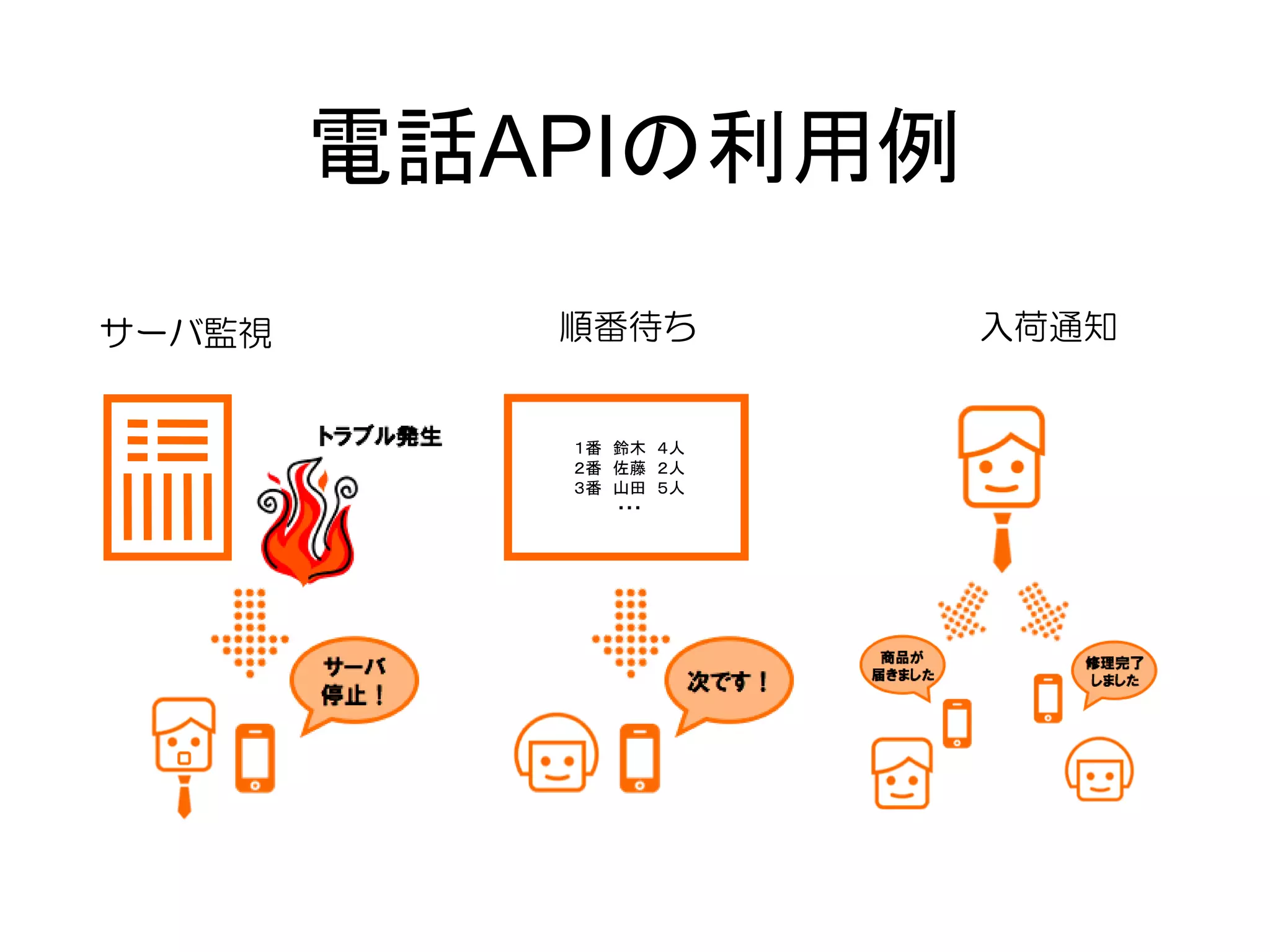
30.
電話APIの利用例 サーバ監視
順番待ち 入荷通知 1番 鈴木 4人 2番 佐藤 2人 3番 山田 5人 ・・・
31.
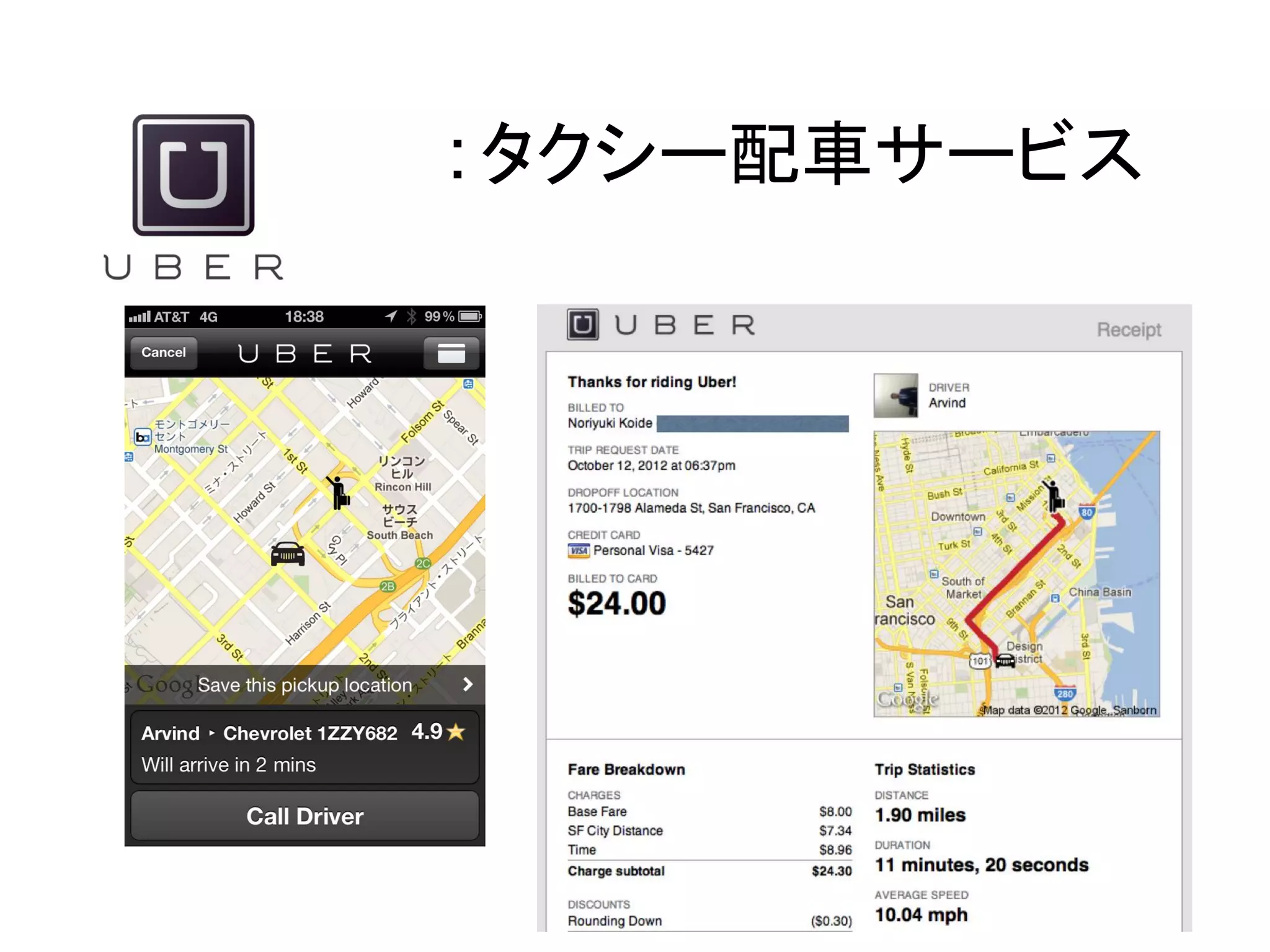
:タクシー配車サービス
32.
:宿泊ポータル
33.
:動画配信サービス コールセンターシステム powered by
34.
今こそbigチャンス! 1. 今までにない、感動的なアプリが作れる! 2. 簡単だから、アイデア次第で勝者になれる! 3.
電話はO2Oの最強ツール、ビジネスは無限に存在!
35.
www.facebook.com/
TwilioforKWC 押してね!
36.
twilio/boundio meetup • 次回は2/21(木)19:00〜@
麹町にて開催
37.
Smart Communication Award
2013 優勝者にはビジネス化支援と賞金 13-14
38.
初音ミクの
さんからコンテンツ協力 【音源提供用ダウンロードURL】 http://sonicwire.com/download/support/dl/201301/CRYPTON_SOUND_CONTENTS_hackathon.zip
40.
もうすぐバレンタインよネ
41.
もうすぐバレンタインよネ
49.
社畜技術者が自由を取り戻すためのアプローチ
51.
http://pbs.twimg.com/media/A_1OeyVCIAAa2MF.jpg
後日神田明神に奉納されていたクラウディアさん絵馬
Download









![デモ①:匿名通話
電話網 電話網
プッシュ[1]→接続&会話
プッシュ[2]→サウンド再生
プッシュ[3]→切断
デモアプリ](https://image.slidesharecdn.com/20130215devsumi15d3slideshare-130215002118-phpapp02/75/2013-15D-3-Azure-25-2048.jpg)
![デモ③:みんなで試そう!
[1]・・・
[2]・・・
[3]・・・
[4]・・・
電話網
みなさん
050-3133-1502](https://image.slidesharecdn.com/20130215devsumi15d3slideshare-130215002118-phpapp02/75/2013-15D-3-Azure-27-2048.jpg)








































![[devsumi2013]【15-D-7】実演!現場の悩みをTOCfEで考え抜く!](https://cdn.slidesharecdn.com/ss_thumbnails/devsumi2013tocfe-130217055825-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)







![[SendGridローンチイベント] パブリック クラウド プラットフォーム「Windows Azure」](https://cdn.slidesharecdn.com/ss_thumbnails/20131210kkesendgridazure-131212011317-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




















![[AWS Summit 2012] 事例セッション #2 Bascule Meets AWS! クラウドが加速させる デジタルクリエイションの世界](https://cdn.slidesharecdn.com/ss_thumbnails/bascule-20120913-121001100100-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





















