Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
RO
Uploaded by
Ryo Okubo
PDF, PPTX
6,424 views
2012/11/14 softlab_study 発表資料「SSDの基礎」
2012/11/14 のsoftlab_study の発表資料 「SSDの基礎」
Technology
◦
Read more
10
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 28
2
/ 28
3
/ 28
4
/ 28
5
/ 28
6
/ 28
7
/ 28
8
/ 28
9
/ 28
10
/ 28
11
/ 28
12
/ 28
13
/ 28
14
/ 28
15
/ 28
16
/ 28
17
/ 28
18
/ 28
19
/ 28
20
/ 28
21
/ 28
22
/ 28
23
/ 28
24
/ 28
25
/ 28
26
/ 28
27
/ 28
28
/ 28
More Related Content
PDF
20111028ssmjp
by
Takeshi HASEGAWA
PDF
[B11] 基礎から知るSSD(いまさら聞けないSSDの基本) by Hironobu Asano
by
Insight Technology, Inc.
PPTX
Ansible+Docker
by
正太 佐久本
PPTX
NVMe でハァハァしようよ #sapporocpp
by
hiyohiyo
PPTX
Ansible ではじめるインフラのコード化入門
by
Sho A
PPTX
Ansibleを使ってdockerコンテナをプロビジョニングする
by
Ryo Adachi
PDF
Ansibleを使ってサーバ100台にBaculaクライアントを簡単インストール
by
Ken Sawada
PDF
Favorite English YouTube Channels
by
Emma Haruka Iwao
20111028ssmjp
by
Takeshi HASEGAWA
[B11] 基礎から知るSSD(いまさら聞けないSSDの基本) by Hironobu Asano
by
Insight Technology, Inc.
Ansible+Docker
by
正太 佐久本
NVMe でハァハァしようよ #sapporocpp
by
hiyohiyo
Ansible ではじめるインフラのコード化入門
by
Sho A
Ansibleを使ってdockerコンテナをプロビジョニングする
by
Ryo Adachi
Ansibleを使ってサーバ100台にBaculaクライアントを簡単インストール
by
Ken Sawada
Favorite English YouTube Channels
by
Emma Haruka Iwao
Viewers also liked
PDF
運用のためのPlaybook (Playbook for Operation)
by
Shingo Kitayama
PDF
さくらインターネットにおけるServerspec導入事例(DevOps勉強会 #3 Serverspecの巻)
by
さくらインターネット株式会社
PDF
Ansibleで味わうHelion OpenStack
by
Masataka Tsukamoto
PDF
AnsibleによるHWプロビジョニング -OneViewの連携-
by
Takahiro Kida
PDF
リブセンスのインフラで使ってるAnsibleのお話
by
Shohei Koyama
PDF
Ansible 入門 #01 (初心者向け)
by
Taro Hirose
PDF
Ansibleはじめよぉ -Infrastructure as Codeを理解-
by
Shingo Kitayama
PDF
Ansible Playbookの短時間デバッグ方法
by
Kishin Yagami
PDF
はじめての UWP アプリ開発
by
hiyohiyo
PDF
What is an Ansible?
by
Shunsaku Kudo
PPTX
Desktop App Converter で Microsoft ストアデビュー & 野良野良ライフ満喫!!
by
hiyohiyo
PDF
Ansibleで構成管理始める人のモチベーションをあげたい! (Cloudera World Tokyo 2014LT講演資料)
by
NTT DATA OSS Professional Services
PDF
C++でNVMeと(*´Д`)ハァハァ 戯れていたら一年経ってた。
by
hiyohiyo
PDF
AWS 初心者向けWebinar 利用者が実施するAWS上でのセキュリティ対策
by
Amazon Web Services Japan
PPTX
新卒3年目のぼくが、でぶおぷす???なインフラおじさん方にAnsibleを導入してみた
by
Shuntaro Saiba
PDF
OpenStackでつくる開発環境と外道塾
by
外道 父
PPTX
サーバーの動くメモをAnsibleでとろう
by
Takayuki Hayashi
PPTX
ほんとうはこわいAnsible
by
Takahiro Nakayama
PPTX
わかる!一眼
by
Takahiro Nakayama
PDF
Ansible はじめてみました
by
Takeshi Kuramochi
運用のためのPlaybook (Playbook for Operation)
by
Shingo Kitayama
さくらインターネットにおけるServerspec導入事例(DevOps勉強会 #3 Serverspecの巻)
by
さくらインターネット株式会社
Ansibleで味わうHelion OpenStack
by
Masataka Tsukamoto
AnsibleによるHWプロビジョニング -OneViewの連携-
by
Takahiro Kida
リブセンスのインフラで使ってるAnsibleのお話
by
Shohei Koyama
Ansible 入門 #01 (初心者向け)
by
Taro Hirose
Ansibleはじめよぉ -Infrastructure as Codeを理解-
by
Shingo Kitayama
Ansible Playbookの短時間デバッグ方法
by
Kishin Yagami
はじめての UWP アプリ開発
by
hiyohiyo
What is an Ansible?
by
Shunsaku Kudo
Desktop App Converter で Microsoft ストアデビュー & 野良野良ライフ満喫!!
by
hiyohiyo
Ansibleで構成管理始める人のモチベーションをあげたい! (Cloudera World Tokyo 2014LT講演資料)
by
NTT DATA OSS Professional Services
C++でNVMeと(*´Д`)ハァハァ 戯れていたら一年経ってた。
by
hiyohiyo
AWS 初心者向けWebinar 利用者が実施するAWS上でのセキュリティ対策
by
Amazon Web Services Japan
新卒3年目のぼくが、でぶおぷす???なインフラおじさん方にAnsibleを導入してみた
by
Shuntaro Saiba
OpenStackでつくる開発環境と外道塾
by
外道 父
サーバーの動くメモをAnsibleでとろう
by
Takayuki Hayashi
ほんとうはこわいAnsible
by
Takahiro Nakayama
わかる!一眼
by
Takahiro Nakayama
Ansible はじめてみました
by
Takeshi Kuramochi
Similar to 2012/11/14 softlab_study 発表資料「SSDの基礎」
PDF
NVMCT #1 3D NANDフラッシュメモリの動向 (Trend of 3D NAND Flash Memory)
by
Fixstars Corporation
PPTX
メモリと遊んでみた Pert2
by
Akira Kaneda
PDF
不揮発メモリとOS研究にまつわる何か
by
Ryousei Takano
PDF
eb_IQ_未知との遭遇(SSD,InfiniBand,PCIexpress)
by
Insight Technology, Inc.
PDF
qpstudy 2014.04 ハードウェア設計の勘所
by
Takeshi HASEGAWA
PDF
D21 dbts tokyo_2013_ssd
by
Insight Technology, Inc.
PPTX
工業用産業用メモリーUDINFO
by
工業用産業用メモリーUDINFOJP
PDF
Toshiba SSD catalog
by
mountaineer07
PDF
[D17]DBエンジニアのための最新HW講座 by Masaya Ishikawa
by
Insight Technology, Inc.
PDF
1次ベーシック講座情報第1回 修正版
by
Nashiro Daisuke
PDF
OSやアプリを問わず装着するだけで重要データを防御するセキュリティバリアデバイス by 戸田 賢二
by
CODE BLUE
PDF
Bitvisorをベースとした既存Windowsのドライバメモリ保護
by
Kuniyasu Suzaki
PPTX
NVMCT #1 ~今さら聞けないSSDの基本~
by
Fixstars Corporation
PDF
kagami_comput2016_13
by
swkagami
PPT
集積回路工学第2・第13回資料
by
Junichi Akita
NVMCT #1 3D NANDフラッシュメモリの動向 (Trend of 3D NAND Flash Memory)
by
Fixstars Corporation
メモリと遊んでみた Pert2
by
Akira Kaneda
不揮発メモリとOS研究にまつわる何か
by
Ryousei Takano
eb_IQ_未知との遭遇(SSD,InfiniBand,PCIexpress)
by
Insight Technology, Inc.
qpstudy 2014.04 ハードウェア設計の勘所
by
Takeshi HASEGAWA
D21 dbts tokyo_2013_ssd
by
Insight Technology, Inc.
工業用産業用メモリーUDINFO
by
工業用産業用メモリーUDINFOJP
Toshiba SSD catalog
by
mountaineer07
[D17]DBエンジニアのための最新HW講座 by Masaya Ishikawa
by
Insight Technology, Inc.
1次ベーシック講座情報第1回 修正版
by
Nashiro Daisuke
OSやアプリを問わず装着するだけで重要データを防御するセキュリティバリアデバイス by 戸田 賢二
by
CODE BLUE
Bitvisorをベースとした既存Windowsのドライバメモリ保護
by
Kuniyasu Suzaki
NVMCT #1 ~今さら聞けないSSDの基本~
by
Fixstars Corporation
kagami_comput2016_13
by
swkagami
集積回路工学第2・第13回資料
by
Junichi Akita
2012/11/14 softlab_study 発表資料「SSDの基礎」
1.
SSDの基礎 #so'lab_study
2012/11/14 @syu_cream
2.
アジェンダ • SSDの基礎
– SSDの基本構成 – NANDフラッシュメモリの基礎 • MOSFETについて • NANDフラッシュメモリのセルについて • NANDフラッシュメモリの基本構成 – SSDのNANDコントローラについて • FTL(Flash TranslaEon Layer) • SSD絡みの最新動向 – PCIe SSD – 余談: 君の知らないSSD物語
3.
SSDの基礎
4.
SSDとは? • 一般的には…
– フラッシュメモリを用いた高速なディスクデバイス • そう言うとUSBメモリとあまり違いが分からない • PCIe SSDはSSDじゃねぇんだよ • →NANDフラッシュメモリを用いた、「インタフェースが HDD互換」な、「ハード内部でバリバリ最適化してい る」ストレージ
5.
SSDの利点・欠点 • 利点
– ランダムアクセスが高速 – 騒音が少ない – 対衝撃性が高い – 省電力 • だが、将来的に電力消費上がる可能性アリ • 欠点 – フラッシュメモリの書換可能回数(寿命)が存在 – 使い込まれるとランダムライト性能が低減する
6.
SSDの基本構成 • インタフェース
– SATA, mSATAコネクタ • DRAM – キャッシュに用いられる • コントローラ – SSDの心臓部とも言える肝心要の部位 – 高速化、寿命の長期化、高信頼性等、仕事多し • NANDフラッシュメモリ – 実際にデータが保持される部位 – セル辺りに保持するビット数が変動したり(後述)
7.
NANDフラッシュメモリの基礎
8.
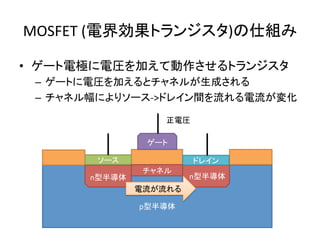
MOSFET (電界効果トランジスタ)の仕組み • ゲート電極に電圧を加えて動作させるトランジスタ
– ゲートに電圧を加えるとチャネルが生成される – チャネル幅によりソース-‐>ドレイン間を流れる電流が変化 正電圧 ゲート ソース ドレイン チャネル n型半導体 n型半導体 電流が流れる p型半導体
9.
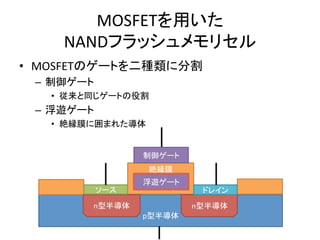
MOSFETを用いた
NANDフラッシュメモリセル • MOSFETのゲートを二種類に分割 – 制御ゲート • 従来と同じゲートの役割 – 浮遊ゲート • 絶縁膜に囲まれた導体 制御ゲート 絶縁膜 浮遊ゲート ソース ドレイン n型半導体 n型半導体 p型半導体
10.
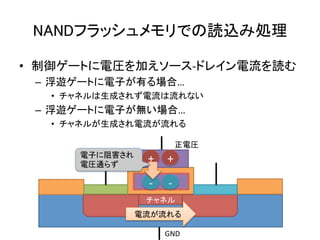
NANDフラッシュメモリでの読込み処理 • 制御ゲートに電圧を加えソース-‐ドレイン電流を読む
– 浮遊ゲートに電子が有る場合… • チャネルは生成されず電流は流れない – 浮遊ゲートに電子が無い場合… • チャネルが生成され電流が流れる 正電圧 電子に阻害され 電圧通らず + + -‐ -‐ チャネル 電流が流れる GND
11.
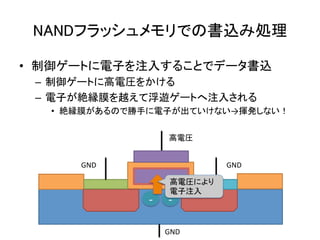
NANDフラッシュメモリでの書込み処理 • 制御ゲートに電子を注入することでデータ書込
– 制御ゲートに高電圧をかける – 電子が絶縁膜を越えて浮遊ゲートへ注入される • 絶縁膜があるので勝手に電子が出ていけない→揮発しない! 高電圧 GND GND 高電圧により 電子注入 -‐ -‐ GND
12.
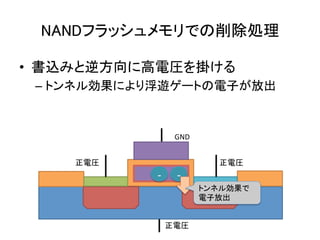
NANDフラッシュメモリでの削除処理 • 書込みと逆方向に高電圧を掛ける
– トンネル効果により浮遊ゲートの電子が放出 GND 正電圧 正電圧 -‐ -‐ トンネル効果で 電子放出 正電圧
13.
SLCとMLC • セル毎に複数ビットの情報を持たせる事も可能
– 浮遊ゲートに注入する電子量をビット数分持つ • SLC(Single Level Cell) – セル辺り1ビットの情報を持つ – 容量拡大が難しく高価だが,高速かつ高寿命 • MLC(MulE Level Cell) – セル辺り2,3ビットの情報を持つ – 容量拡大が容易で安価.しかし低速で寿命は短い – 最近は単にMCLと言うと2ビット,TLC(Triple Level Cell) と言うと3ビットらしい
14.
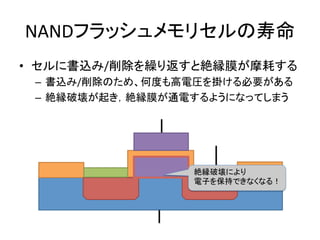
NANDフラッシュメモリセルの寿命 • セルに書込み/削除を繰り返すと絶縁膜が摩耗する
– 書込み/削除のため、何度も高電圧を掛ける必要がある – 絶縁破壊が起き,絶縁膜が通電するようになってしまう 絶縁破壊により 電子を保持できなくなる!
15.
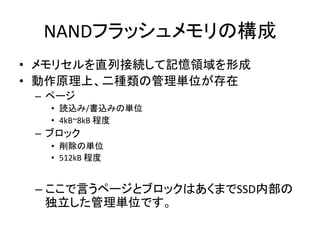
NANDフラッシュメモリの構成 • メモリセルを直列接続して記憶領域を形成 •
動作原理上、二種類の管理単位が存在 – ページ • 読込み/書込みの単位 • 4kB~8kB 程度 – ブロック • 削除の単位 • 512kB 程度 – ここで言うページとブロックはあくまでSSD内部の 独立した管理単位です。
16.
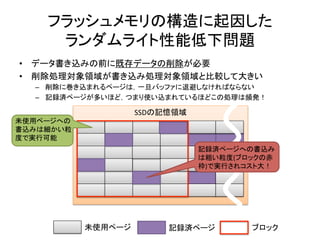
フラッシュメモリの構造に起因した
ランダムライト性能低下問題 • データ書き込みの前に既存データの削除が必要 • 削除処理対象領域が書き込み処理対象領域と比較して大きい – 削除に巻き込まれるページは,一旦バッファに退避しなければならない – 記録済ページが多いほど,つまり使い込まれているほどこの処理は頻発! SSDの記憶領域 未使用ページへの 書込みは細かい粒 度で実行可能 記録済ページへの書込み は粗い粒度(ブロックの赤 枠)で実行されコスト大! 未使用ページ 記録済ページ ブロック
17.
SSDのNANDコントローラ
18.
SSDのNANDコントローラ • SSDの肝心要となる制御機構
– HDD互換なインタフェース提供 – NANDフラッシュメモリ制御 – FTL(Flash TranslaEon Layer)の提供
19.
FTL(Flash TranslaEon Layer) •
基本的にHDD互換インタフェース提供の為のレイヤ – しかし実際は…名前以上の仕事をしている! • FTLの持つ仕事 – 論理アドレスから物理アドレスへの変換 – 不良ブロックの管理 – 誤り訂正 – ウェアレベリング – deduplicaEon ←!? – compression ←!!?
20.
ウェアレベリング • セル当りの書換回数を平滑化
– ブロックに対する書換回数をモニタリング – 書換回数が少ないブロックに書かれるよう変換 – データが静的かどうかを判別して平滑化 • 拡張領域を使ったセル書換頻度低減 – 昨今のSSDは拡張領域を持つ事も • エンタープライズ向けとかだと有り得る – 拡張領域にページ単位で書込み→通常の領域にブロック 単位で一気に書換え処理を行うなど
21.
色々なウェアレベリング • その他、我々の理解を越えた泥臭い延命作
業をしている可能性も。。。
22.
The OpenSSD Project •
オープンソースのSSDファームウェア – Programmable FTL が実現出来る! • オレオレウェアレベリングを詰んだSSDとか実現可能に • hap://www.openssd-‐project.org/wiki/ The_OpenSSD_Project • 余力があればそのうちコード読んで紹介します
23.
PCIe SSD
24.
( ^o^) SSD,良きに計らってくれてすごい! (
˘⊖˘) 。o(待てよ?流石にハードウェアレベルで色々 やり過ぎでは?) (;˘⊖˘) 。o(更に待てよ?そもそもインタフェースの互換 の為に性能縛られているのでは?) |Fusion-‐io|┗(☋` )┓三 ( ◠‿◠ )☛そこに気づいたか・・・ioDrive を使ってもらう ▂▅▇█▓▒░(’ω’)░▒▓█▇▅▂うわああああああ
25.
ioDrive • インタフェースにPCI Express
を使用 • SSDのFTLと同等の機構をデバイスドライバで持つ • ioDrive 専用ファイルシステムまで存在 – DFS[W K. Josephson et al., FAST’10]
26.
余談: 君の知らないSSD物語
27.
メモリセルを自動修復するSSD • Exploi=ng Heat-‐Accelerated
Flash Memory Wear-‐Out Recovery to Enable Self-‐Healing SSDs[Q Wu et al., HotStorage’11] • NANDフラッシュチップを熱して延命(??) – フラッシュチップを三次元構成 – 最下層に加熱層を設置 – データを別チップに退避し加熱して延命。その後データを 復帰 – すみません、あまり読込んでないです。誤解があるかも
28.
自爆ボタンがあるSSD • RunCore InVincible
– 軍用の、物理的破壊ボタン搭載SSD • hap://japanese.engadget.com/2012/05/16/ssd-‐runcore-‐ invincible/ – コントローラに大電流を流してメモリセルをブッ壊す • NANDフラッシュメモリチップから煙が上がる模様 – SSDはFTLにより隠蔽された領域のデータが削除しきれな い問題が有るが物理的にブッ壊せば無問題か • Reliably Erasing Data From Flash-‐Based Solid State Drives[M Wei et al., FAST’11]
Download

![ioDrive
• インタフェースにPCI
Express
を使用
• SSDのFTLと同等の機構をデバイスドライバで持つ
• ioDrive
専用ファイルシステムまで存在
– DFS[W
K.
Josephson
et
al.,
FAST’10]](https://image.slidesharecdn.com/20121114softlabstudypublic-121217003600-phpapp02/85/2012-11-14-softlab_study-SSD-25-320.jpg)
![メモリセルを自動修復するSSD
• Exploi=ng
Heat-‐Accelerated
Flash
Memory
Wear-‐Out
Recovery
to
Enable
Self-‐Healing
SSDs[Q
Wu
et
al.,
HotStorage’11]
• NANDフラッシュチップを熱して延命(??)
– フラッシュチップを三次元構成
– 最下層に加熱層を設置
– データを別チップに退避し加熱して延命。その後データを
復帰
– すみません、あまり読込んでないです。誤解があるかも](https://image.slidesharecdn.com/20121114softlabstudypublic-121217003600-phpapp02/85/2012-11-14-softlab_study-SSD-27-320.jpg)
![自爆ボタンがあるSSD
• RunCore
InVincible
– 軍用の、物理的破壊ボタン搭載SSD
• hap://japanese.engadget.com/2012/05/16/ssd-‐runcore-‐
invincible/
– コントローラに大電流を流してメモリセルをブッ壊す
• NANDフラッシュメモリチップから煙が上がる模様
– SSDはFTLにより隠蔽された領域のデータが削除しきれな
い問題が有るが物理的にブッ壊せば無問題か
• Reliably
Erasing
Data
From
Flash-‐Based
Solid
State
Drives[M
Wei
et
al.,
FAST’11]](https://image.slidesharecdn.com/20121114softlabstudypublic-121217003600-phpapp02/85/2012-11-14-softlab_study-SSD-28-320.jpg)

![[B11] 基礎から知るSSD(いまさら聞けないSSDの基本) by Hironobu Asano](https://cdn.slidesharecdn.com/ss_thumbnails/b11-140623022028-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


































![[D17]DBエンジニアのための最新HW講座 by Masaya Ishikawa](https://cdn.slidesharecdn.com/ss_thumbnails/d17oracleishikawa-131122045254-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





