Download as PDF, PPTX

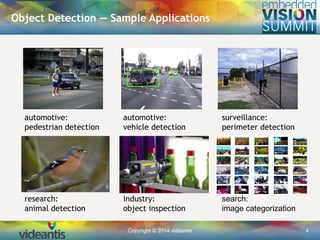
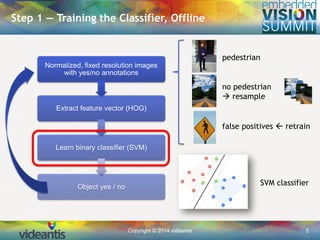
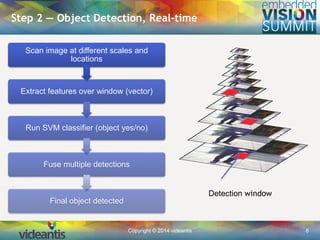
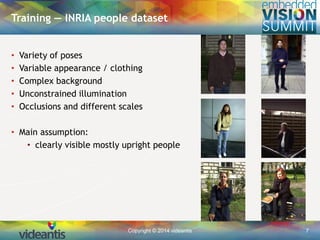
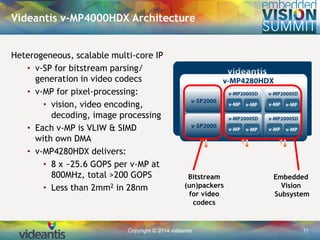
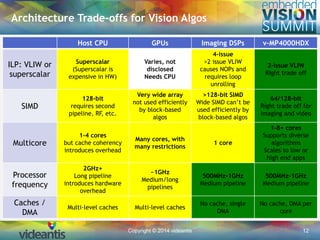
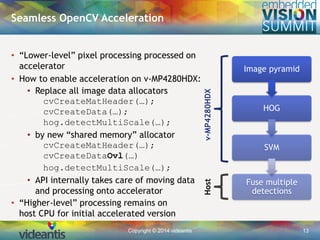
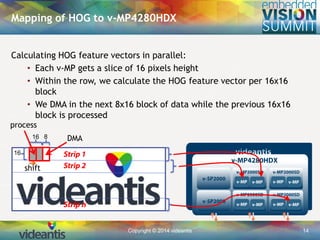
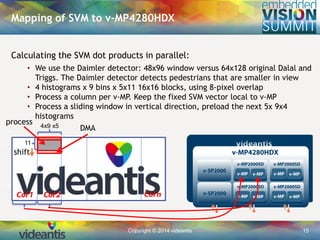
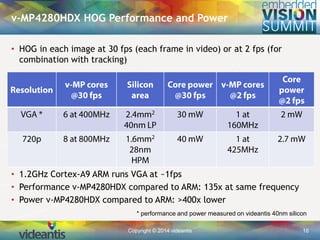


The document discusses the implementation of Histogram of Oriented Gradients (HOG) on a parallel vision processor, focusing on its application in object detection. It highlights the importance of object detection algorithms, the process of training classifiers, and the processing architecture of the videantis v-mp4000hdx that allows for efficient computation. The key conclusion is that HOG can achieve high detection rates while being computationally demanding, but can be implemented efficiently on specialized hardware.










































![[212]big models without big data using domain specific deep networks in data-...](https://cdn.slidesharecdn.com/ss_thumbnails/212bigmodelswithoutbigdatausingdomain-specificdeepnetworksindata-scarcesettings-171017003514-thumbnail.jpg?width=640&height=640&fit=bounds)