2
• SLAM isthe core element of navigation system for mobile robot and vehicles.
• Where is the Robot?
• An Autonomous robot needs to know
– About the environment
• Pre-existing map
• Create a map as it explores
– Where it is relation to its environment
為何移動機器人需要 SLAM?
Hey,
Where am I?
3.
3
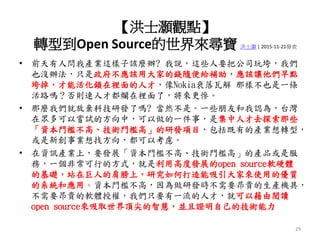
• 同步定位與地圖構建(SLAM或Simultaneous localizationand
mapping)是一種概念:希望機器人從未知環境的未知地點出發,
在運動過程中通過重複觀測到的環境特徵 Landmark(比如,牆角,
柱子等)定位自身位置和姿態,再根據自身位置增量式的構建地
標,從而達到同時定位和地標/地圖構建的目的。
• Time T0 - Sensor Observation: 量測測環境特徵點 (M1,M2,M3)
– (建立世界座標參照地標 L1,L2,L3)
• Time T1 – Motion Prediction: 機器人位移估測 (U0) --有誤差
• Time T1 – Sensor Observation: 重新量測環境特徵點(M1,M2)
同步定位與建圖 (SLAM) Simultaneous
Localization and Mapping
T0
L
1
T1
U0
M
1
M1 M2
M
1
T0
L
1
L
2
L
3
M1 M2 M3
4.
4
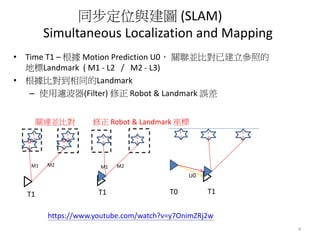
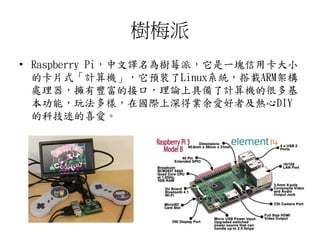
• Time T1– 根據 Motion Prediction U0, 關聯並比對已建立參照的
地標Landmark ( M1 - L2 / M2 - L3)
• 根據比對到相同的Landmark
– 使用濾波器(Filter) 修正 Robot & Landmark 誤差
同步定位與建圖 (SLAM)
Simultaneous Localization and Mapping
L
2
L
3
M1 M2
T1
關連並比對
M
1
M
2
修正 Robot & Landmark 座標
L
2
L
3
M1 M2
T1 T0
L
1
T1
U0
L
2
L
2
https://www.youtube.com/watch?v=y7OnimZRj2w
11
• Particle Filteris a robust method based on Monte-Carlo and Bayesian.
• Each particle presents a robot pose estimation in the map
• When robot is moving, the motion prediction with observation will
eliminate the wrong particles and resampling from alive particles
• Finally , all particles are converged
粒子濾波器應用於機器人地圖定位
https://www.youtube.com/watch?v=8g3L43-ZZ_0
17
• Knightscope K5/K3
–K5 is defined as a security guard (2013/12, Beta version)
– K3 is defined as a indoor data machine (Coming at 2016)
Knightscope Security Robot
https://www.youtube.com/watch?v=yyPKrzK7VXI
19
• Flexible ExchangePlatform (HW/ME design)
• Facility Preparation
– The Aethon TUG is a smart autonomous mobile robot: it doesn’t need
any beacons, staging depots or specific infrastructure to be added to
the facility. It uses its built in map and array of on-board sensors to
navigate. This is a real advantage of the TUG and sets it apart from
AGV systems.
TUG Hospital Robot
20.
20
• Navigation
– TheTUG uses smart autonomous
navigation. A map of your hospital
facility is created by our
implementation team using a highly
accurate laser floor dimensioning
tool.
– The TUG utilizes your existing WiFi
system (or 900mhz if preferred) to
communicate with elevators,
automatic doors and fire alarms.
TUG Hospital Robot (Cont.)
https://www.youtube.com/watch?v=kCDJObCNufg
MRPT( Mobile RobotProgramming
Toolkit )
• The Mobile Robot Programming Toolkit (MRPT) is a cross-platform and
open source C++ library aimed to help robotics researchers to design and
implement algorithms related to Simultaneous Localization and Mapping
(SLAM), computer vision and motion planning (obstacle avoidance).
• Different research groups have employed MRPT to implement projects
reported in some of the major robotics journals and conferences.
38
AGV 之多車管理系統架構建置
42
Multi-master ROSsystems / Technical Report
Managing a Fleet of Autonomous Mobile Robots (AMR) using Cloud Robotics Platform
43.
GAZEBO之多車管理系統模擬
43
• The simulatedenvironment for the fleet management system can be
created using Gazebo, which is an open-source software well integrated
with ROS
Managing a Fleet of Autonomous Mobile Robots (AMR) using Cloud Robotics Platform





































![[공간정보시스템 개론] L03 지구의형상과좌표체계](https://cdn.slidesharecdn.com/ss_thumbnails/l03-170314115023-thumbnail.jpg?width=640&height=640&fit=bounds)







![지리정보체계(GIS) - [2] 좌표계 이해하기](https://cdn.slidesharecdn.com/ss_thumbnails/sugis2018c02-180916155653-thumbnail.jpg?width=640&height=640&fit=bounds)








![[공간정보시스템 개론] L10 수치표고모델](https://cdn.slidesharecdn.com/ss_thumbnails/l10-170314114727-thumbnail.jpg?width=640&height=640&fit=bounds)


![[공간정보시스템 개론] L06 GIS의 이해](https://cdn.slidesharecdn.com/ss_thumbnails/l06gis-170314114559-thumbnail.jpg?width=640&height=640&fit=bounds)

































