Download to read offline
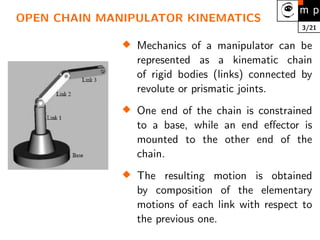
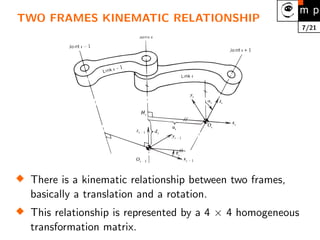
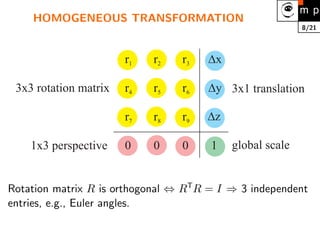
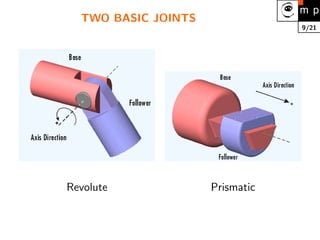
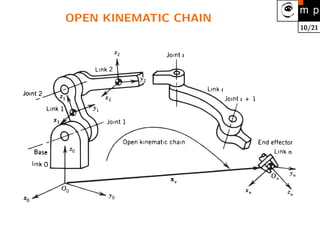
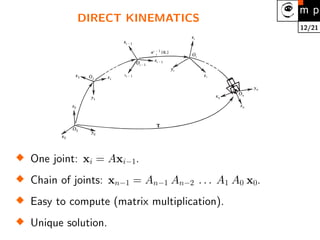
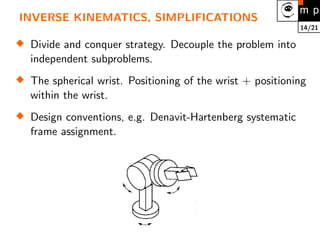
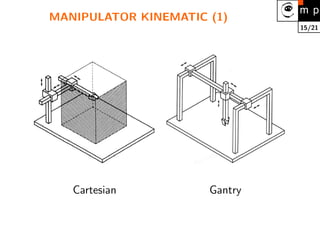
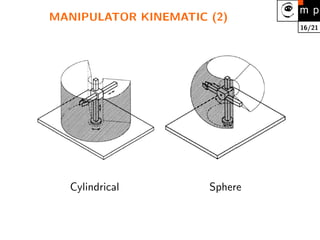
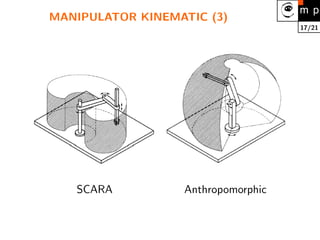
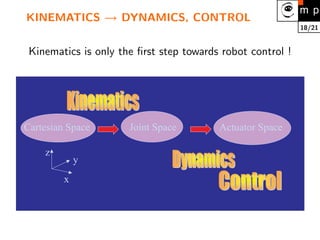


1. Robot kinematics is the analytical study of robot motion without considering forces or moments. It involves representing a robot as a series of rigid links connected by joints and determining the relationship between joint positions and the end effector position and orientation. 2. There are two main kinematic tasks: direct kinematics, which determines the end effector pose given joint positions, and inverse kinematics, which determines required joint positions to achieve a desired end effector pose. 3. Direct kinematics involves matrix multiplications to transform between reference frames. Inverse kinematics is more difficult and involves solving nonlinear equations, which may have multiple or no solutions. Simplifications like decoupling subproblems can help.