Download as PDF, PPTX
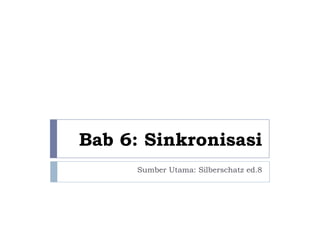
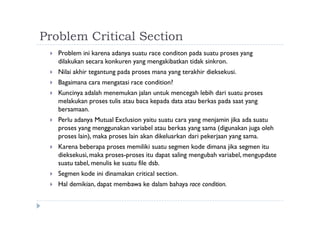
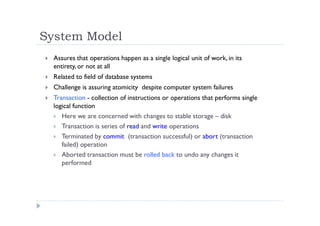
![Bounded Buffer (2)
9
Shared data type item = … ;
var buffer array
in, out: 0..n-1;
counter: 0..n;
in, out, counter := 0;
Producer process
repeat
…
produce an item in nextp
…
while counter = n do no-op;
buffer [in] := nextp;
in := in + 1 mod n;
counter := counter +1;
until false;](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-9-320.jpg)
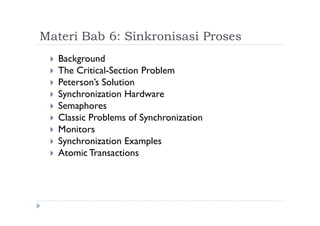
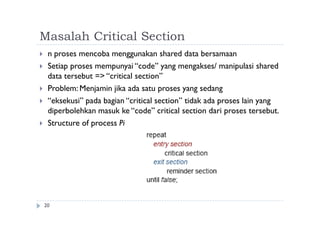
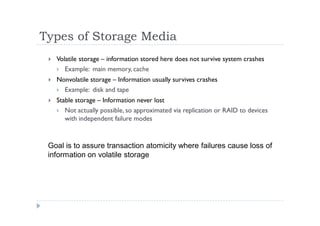
![Bounded Buffer (3)
10
Consumer process
repeat
while counter = 0 do no-op;
nextc := buffer [out];
out := out + 1 mod n;
counter := counter – 1;
…
consume the item in nextc
…
until false;](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-10-320.jpg)
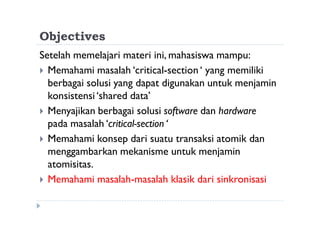
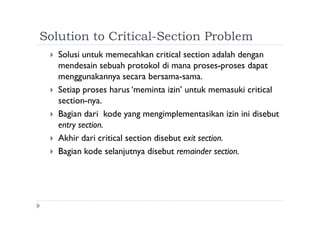
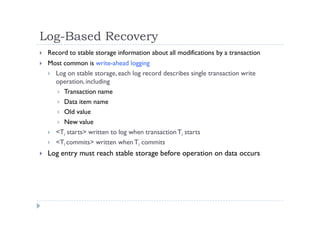
![Producer
while (true) {
/* produce an item and put in nextProduced
*/
while (count == BUFFER_SIZE)
; // do nothing
buffer [in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
count++;
}](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-13-320.jpg)
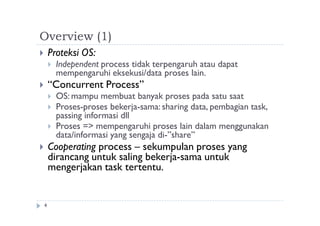
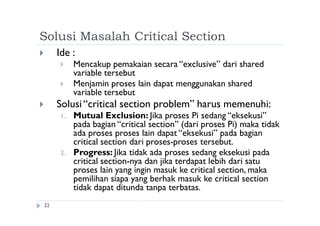
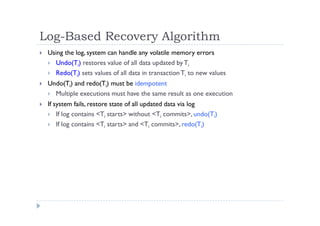
![Consumer
while (true) {
while (count == 0)
; // do nothing
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
count--;
/* consume the item in nextConsumed
}](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-14-320.jpg)


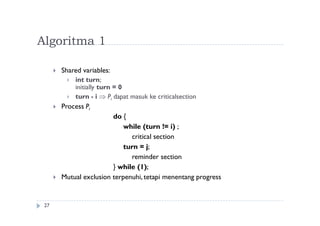
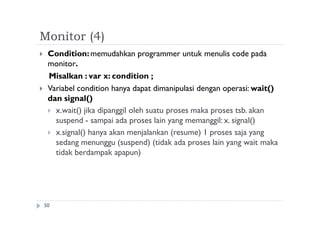
![Algoritma 2
28
Shared variables
boolean flag[2];
initially flag [0] = flag [1] = false.
flag [i] = true Pi siap dimasukkan ke dalam critical section
Process Pi
do {
flag[i] := true;
while (flag[j]) ;
critical section
flag [i] = false;
remainder section
} while (1);
Mutual exclusion terpenuhi tetapi progress belum terpenuhi.](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-28-320.jpg)
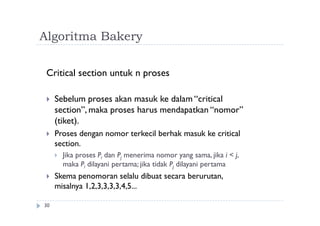
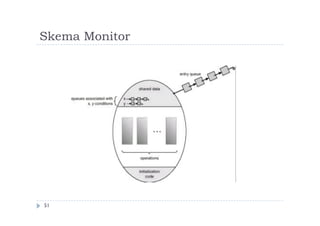
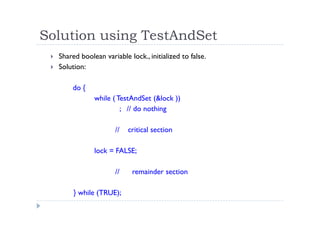
![Algoritma 3
29
Kombinasi shared variables dari algoritma 1 and 2.
Process Pi
do {
flag [i]:= true;
turn = j;
while (flag [j] and turn = j) ;
critical section
flag [i] = false;
remainder section
} while (1);
Ketiga kebutuhan terpenuhi, solusi masalah critical section
pada dua proses](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-29-320.jpg)
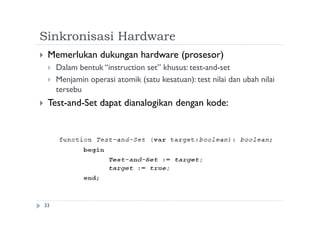
![Algoritma Bakery (2)
31
Notasi < urutan lexicographical (ticket #, process id #)
(a,b) < c,d) jika a < c atau jika a = c and b < d
max (a0,…, an-1) dimana a adalah nomor, k, seperti pada k
ai untuk i - 0,
…, n – 1
Shared data
var choosing: array [0..n – 1] of boolean
number: array [0..n – 1] of integer,
Initialized: choosing =: false ; number => 0](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-31-320.jpg)
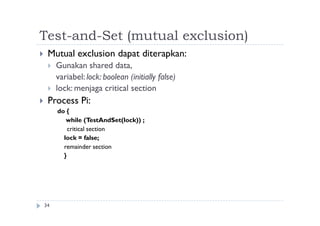
![Algoritma Bakery (3)
32
do {
choosing[i] = true;
number[i] = max(number[0],number[1], …, number [n –
1])+1;
choosing[i] = false;
for (j = 0; j < n; j++) {
while (choosing[j]) ;
while ((number[j] != 0) && (number[j,j] <
number[i,i])) ;
}
critical section
number[i] = 0;
remainder section
} while (1);](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-32-320.jpg)

![Dining-Philosophers Problem
44
Shared data
semaphore chopstick[5];
Semua inisialisasi bernilai 1](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-44-320.jpg)
![Dining-Philosophers Problem
45
Philosopher i:
do {
wait(chopstick[i])
wait(chopstick[(i+1) % 5])
…
eat
…
signal(chopstick[i]);
signal(chopstick[(i+1) % 5]);
…
think
…
} while (1);](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-45-320.jpg)
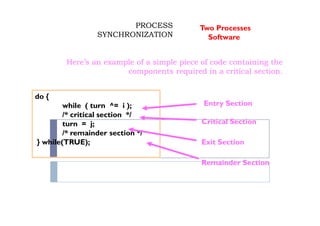
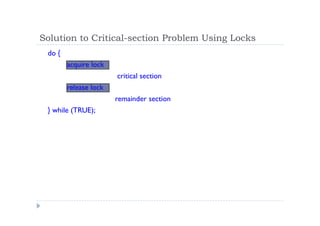
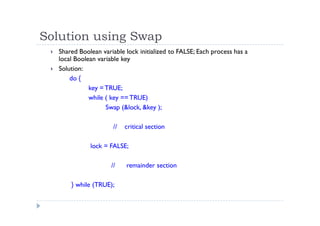
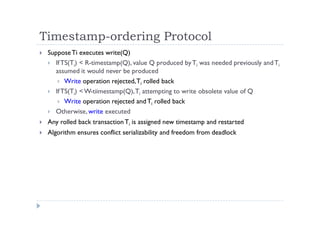
![Pemecahan Masalah Critical Section: Peterson’s
Solution
Two process solution
Assume that the LOAD and STORE instructions are atomic; that is,
cannot be interrupted.
The two processes share two variables:
int turn;
Boolean flag[2]
The variable turn indicates whose turn it is to enter the critical
section.
The flag array is used to indicate if a process is ready to enter the
critical section. flag[i] = true implies that process Pi is ready!](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-52-320.jpg)
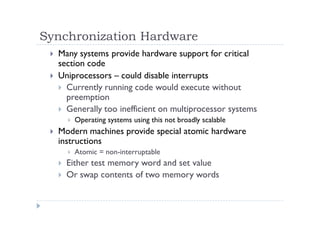
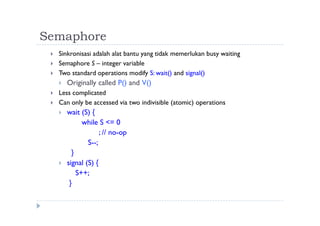
![Algorithm for Process Pi
do {
flag[i] = TRUE;
turn = j;
while (flag[j] && turn == j);
critical section
flag[i] = FALSE;
remainder section
} while (TRUE);](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-54-320.jpg)
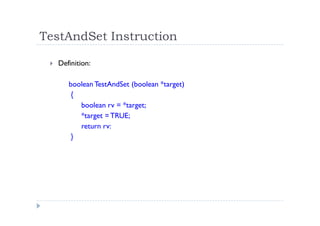
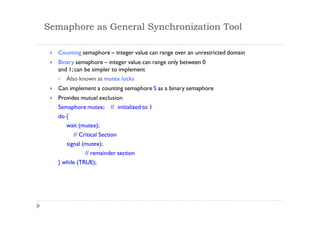
![Bounded-waiting Mutual Exclusion with TestandSet()
do {
waiting[i] = TRUE;
key = TRUE;
while (waiting[i] && key)
key = TestAndSet(&lock);
waiting[i] = FALSE;
// critical section
j = (i + 1) % n;
while ((j != i) && !waiting[j])
j = (j + 1) % n;
if (j == i)
lock = FALSE;
else
waiting[j] = FALSE;
// remainder section
} while (TRUE);](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-61-320.jpg)
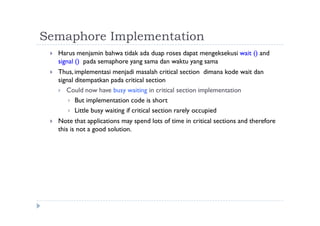
![Dining-Philosophers Problem
Shared data
Bowl of rice (data set)
Semaphore chopstick [5] initialized to 1](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-75-320.jpg)
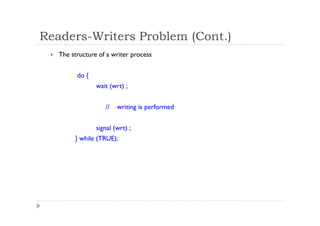
![Dining-Philosophers Problem (Cont.)
The structure of Philosopher i:
do {
wait ( chopstick[i] );
wait ( chopStick[ (i + 1) % 5] );
// eat
signal ( chopstick[i] );
signal (chopstick[ (i + 1) % 5] );
// think
} while (TRUE);](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-76-320.jpg)

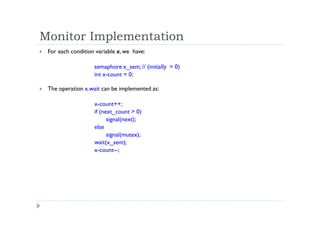
![Solution to Dining Philosophers
monitor DP
{
enum { THINKING;HUNGRY, EATING) state [5] ;
condition self [5];
void pickup (int i) {
state[i] = HUNGRY;
test(i);
if (state[i] != EATING) self [i].wait;
}
void putdown (int i) {
state[i] = THINKING;
// test left and right neighbors
test((i + 4) % 5);
test((i + 1) % 5);
}](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-82-320.jpg)
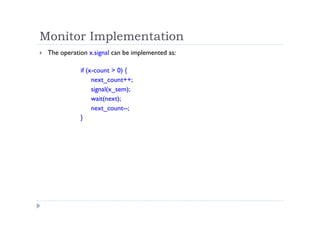
![Solution to Dining Philosophers (cont)
void test (int i) {
if ( (state[(i + 4) % 5] != EATING) &&
(state[i] == HUNGRY) &&
(state[(i + 1) % 5] != EATING) ) {
state[i] = EATING ;
self[i].signal () ;
}
}
initialization_code() {
for (int i = 0; i < 5; i++)
state[i] = THINKING;
}
}](https://image.slidesharecdn.com/fkqdtiblrqu4yulc7cv5-140524215617-phpapp02/85/09-sinkronisasi-proses-83-320.jpg)




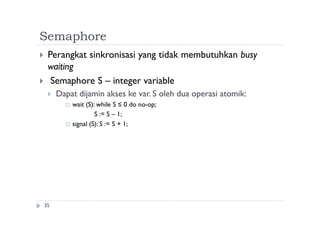
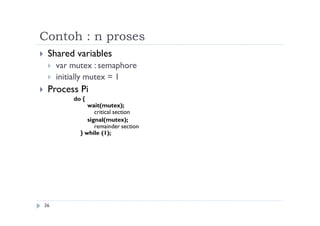
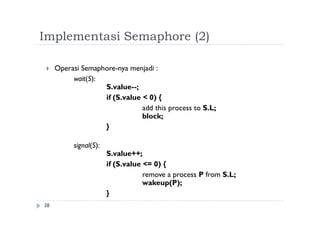
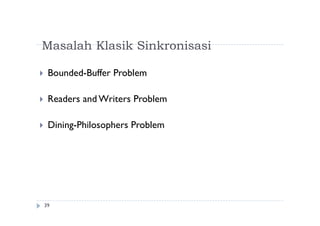
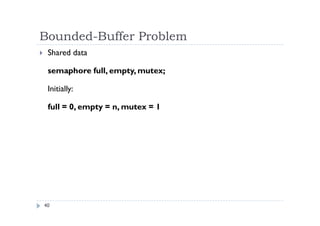
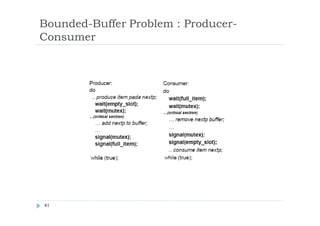
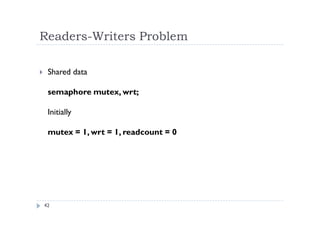
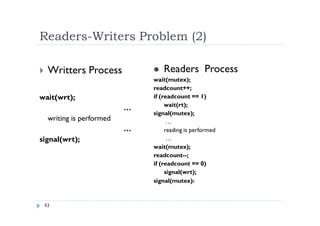
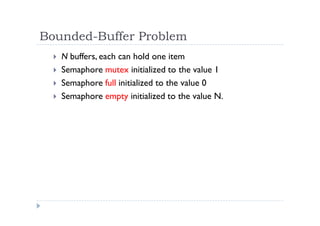
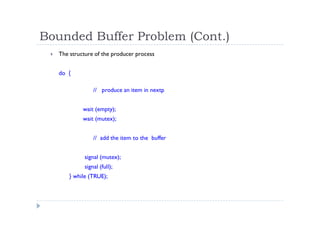
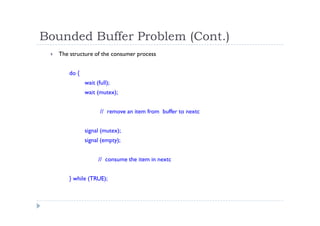
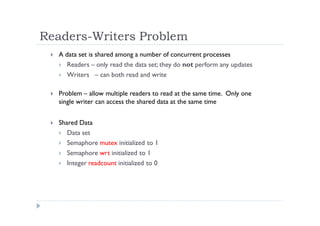
The document discusses synchronization of processes and solutions to critical section problems. It covers background on concurrency and shared data leading to inconsistent states. The bounded buffer problem is presented as an example requiring synchronization. Race conditions can occur when multiple processes concurrently update shared data. Solutions must ensure mutual exclusion and progress. Peterson's algorithm and semaphores are introduced as synchronization techniques.
























































![[Www.akachopa.com]sbmptn 2013 soshum](https://cdn.slidesharecdn.com/ss_thumbnails/olefm6qot3kuabfsekma-140604171655-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

![Snmptn 2012 tpa [akachopa.com]](https://cdn.slidesharecdn.com/ss_thumbnails/zzsq1hpns6m6mzeyogn6-140524215619-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![Snmptn 2012 ips [akachopa.com]](https://cdn.slidesharecdn.com/ss_thumbnails/weujz2b4rx6rhmllxxek-140524215618-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![Snmptn 2012 ipa [akachopa.com]](https://cdn.slidesharecdn.com/ss_thumbnails/3so2bucrou0gfayth4g1-140524215619-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![Snmptn 2012 tbs [akachopa.com]](https://cdn.slidesharecdn.com/ss_thumbnails/l1pjcfgtqdobtkvsjapa-140524215620-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Www.akachopa.com]sbmptn 2013 saintek](https://cdn.slidesharecdn.com/ss_thumbnails/to5l8nsurgeo6wbi7rg2-140604171654-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Www.akachopa.com]sbmptn 2013 tkdu](https://cdn.slidesharecdn.com/ss_thumbnails/dgoaxiyns76b3abbggfe-140604171655-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Www.akachopa.com]sbmptn 2013 tpa](https://cdn.slidesharecdn.com/ss_thumbnails/r9qe33n6skyjh53xq25v-140604171701-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
