
Recommended
More Related Content
More from Rumah Belajar
More from Rumah Belajar (20)
Recently uploaded
Recently uploaded (20)
Bab ii kinematika balik
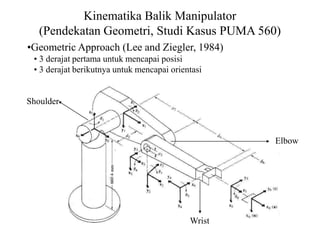
- 1. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) •Geometric Approach (Lee and Ziegler, 1984) • 3 derajat pertama untuk mencapai posisi • 3 derajat berikutnya untuk mencapai orientasi Shoulder Elbow Wrist
- 2. Download slide di http://rumah-belajar.org
- 3. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) •Beberapa Definisi :
- 4. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Konfigurasi Robot berdasarkan definisi diatas • Konfigurasi dapat dinyatakan dalam indikator
- 5. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi untuk 3 Joint Pertama Perhatikan posisi p dimana 3joint pertama berpotongan dengan 3 joint terakhir, yang memenuhi hubungan : Yang berhubungan denganvektor posisi dari transformasi 0T4
- 6. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 1 • Jika vektor posisi p diproyeksikan terhadap bidang x0y0 diperoleh beberapa persamaan sbb :
- 7. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 1 • Indeks superscript (L dan R) pada sudut joint menyatakan konfigurasi Left dan Right Arm • Fungsi cosinus dan sinus untuk konfigurasi Left/Right Arm • Persamaan diatas dapat diekspresikan ke dalam bentuk persamaan dengan menggunakan indikator ARM (Left/Right) menjadi
- 8. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Diperoleh Sudut Joint 1
- 9. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 2 • Jika vektor posisi p diproyeksikan terhadap bidang x1y1 diperoleh beberapa nilai sudut joint 2 sesuai dengan 4 konfigurasi lengan : (lihat Tabel)
- 10. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 2 • Dari tabel diatas nilai sudut joint 2 dapat ekspresikan ke dalam bentuk persamaan dengan menggunakan indikator ARM dan ELBOW sbb : • Dari gambar geometri diperoleh beberapa persamaan
- 11. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 2 • Dari persamaan diatas dapat diperoleh bentuk cosinus dan sinus dari sudut Joint 2 adalah : • Diperoleh Sudut Joint 2
- 12. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 3 • Jika vektor posisi p diproyeksikan terhadap bidang x2y2 diperoleh beberapa nilai sudut joint 3 sesuai dengan 4 konfigurasi lengan (lihat tabel) :
- 13. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 3 • Dari tabel diatas sudut joint 3 dapat diekspresikan ke dalam bentuk persamaan • Bentuk sinus dan cosinus persamaan diatas : • Diperoleh Sudut Joint 3
- 14. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi untuk 3 Joint Terakhir • Atur joint 4 sedemikian rupa sehingga rotasi terhadap joint 5 akan mensejajarkan (align) sumbu dari joint 6 dengan vektor approach yang telah ditentukan (given) • Atur joint 5 untuk mensejajarkan sumbu joint 6 dengan vektor approach • Atur joint 6 untuk mensejajarkan vektor sliding (atau y6) dan vektor normal • Kriteria diatas diekspresikan ke dalam bentuk operasi terhadap vektor :
- 15. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi untuk 3 Joint Terakhir Shoulder Elbow Wrist
- 16. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 4 • Perhatikan gambar proyeksi KK 0X4Y4Z4 ke bidang X3Y3 dan tabel yang menggambarkan orientasi WRIST yang dinyatakan dalam indikator
- 17. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 4 • Dari gambar tadi terlihat hubungan persamaan Dimana vektor x3 dab y3 adalah vektor kolom dari 0T3 • Dengan demikian solusi dari sudut joint 4
- 18. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 5 • Perhatikan gambar proyeksi KK 0X5Y5Z5 ke bidang X4Y4 memenuhi hubungan persamaan : • Dimana vektor x4 dan y4 adalah vektor kolom dari 0T4 • Dengan demikian solusi dari sudut joint 5
- 19. Kinematika Balik Manipulator (Pendekatan Geometri, Studi Kasus PUMA 560) • Solusi Sudut Joint 6 • Perhatikan gambar proyeksi KK nsa ke bidang X5Y5 memenuhi hubungan persamaan : • Dimana vektor y5 adalah vektor kolom dari 0T5 dan n, s adalah vektor normal dan vektor sliding 0T6 • Dengan demikian solusi dari sudut joint 6
- 20. Download slide di http://rumah-belajar.org