Focal Plane Array optical sectioning
•Download as PPTX, PDF•
3 likes•743 views

Focal Plane Array characterization and side wall morphology through confocal imaging optical sectioning using Scanning Confocal Microscope

Recommended
More Related Content
More from Dr. Pranav Rathi
More from Dr. Pranav Rathi (20)
Recently uploaded
Recently uploaded (20)
Focal Plane Array optical sectioning
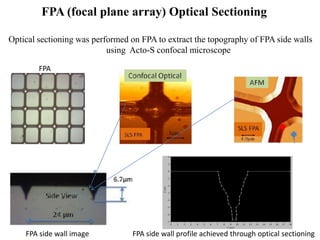
- 1. FPA (focal plane array) Optical Sectioning Optical sectioning was performed on FPA to extract the topography of FPA side walls using Acto-S confocal microscope FPA FPA side wall image FPA side wall profile achieved through optical sectioning
- 2. FPA Optical Sectioning Details • FPA (focal plane array; real sample) optical sectioning was achieved through confocal reflection imaging using Acto-S confocal microscope • Images were taken with blue laser 405nm, single mode fiber P-1-405A-FC-5 on laser side and P-1-460A-FC-5 on detection side with 100x objective • Images were take over the valley between 4 pixels at every 250nm slice from top to bottom of the pixel over 8 to 10um range in Z (Z is the depth along sectioning was performed) • Images were 18X18um and 512X512px
- 3. FPA Optical Sectioning Experiment Setup
- 5. FPA Optical Sectioning Experiment Location
- 9. 8.75µm8.5µm8.25µm8µm The data was acquired using CP research system piezo scanner. Scanner performed raster scan from one corner to the other (diagonal corner) of the image and then came back to the starting position in next scan. During this scanner had shifted so the two consecutive images were slightly displaced (same features have different pixel numbers). Every odd and even number images have same pixel positions. To construct 3D image the features had to be crosscorrelated with pixel numbers in all the images.
- 10. Pixel top (1) .5µm (3) 1.5µm (7)1µm (5) .25µm (2) .75µm (4) 1.75µm (8)1.25µm (6) Images with similar shift (odd and even number)
- 11. FPA 3D image produced by the slices
- 13. Intersection: Line profiles along X-axis
- 14. Line profile (I vs X) at every micron (odd number data set)
- 15. Line profile (I vs X) at every .5 micron (odd number data sets)
- 16. Line profile (I vs X) at every micron detailed view
- 23. Intensity I(X,Z) vs X every data set corresponds to different Z slice, each slice is half micron apart in Z Pixel top Pixel top.5um 1um 1.5um 2um 2.5um 3.5um 3um 4um 5um 4.5um 5.5um
- 24. FPA pixel side wall I(Z) vs X (correspond the data points to slide 10) X
- 25. Intersection: Line profiles along Y-axis
- 26. Line profile (I vs Y) at every 1 micron (odd number data set)
- 27. Line profile (I vs Y) at every .5 micron (odd number data sets)
- 28. Line profile (I vs Y) at every 1 micron detailed view
- 35. Intensity I(X,Z) vs Y every data set corresponds to different Z slice, each slice is half micron apart in Z Pixel top Pixel top .5um 1um 1.5um 2um 2.5um 3um 5.5um Y Pixel top Pixel top .5um 1um 1.5um 2um 2.5um 3um 5.5um
- 36. (correspond the intensities in slide 24) Pixel Pixel ~1µm ~4.5µm Wall FPA pixel side wall I(Z) vs Y
- 37. (correspond the data points to slide 35) Pixel Pixel ~1µm ~4.5µm Wall FPA pixel side wall I(Z) vs Y
- 38. Making of FPA pixel side wall I(Z) vs Y (slide 37) Steps 1. Select the slope change point on the first line profile 2. Note down the pixel number 3. Put down the slope on the next line profile and note down the pixel number of the endpoint of slope 4. Do the same for the next consecutive line profiles 5. Do this for all lines on both sides of the profiles 6. Plot pixel numbers with line profile depths (depth at which the profile was acquired) 7. Plot depth vs pixel number Slope
- 40. Software used: Lab VIEW V 2009 and 2011 Confocal Image Confocal Image processing softwareVI
- 41. FPA line profile (I vs X) extraction softwareVI
- 42. FPA side wall (I(X,Z) vs X) profile softwareVI