Download as PDF, PPTX
![10
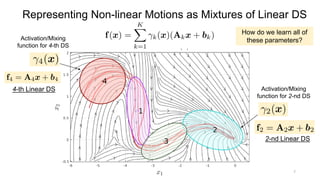
Learning Non-linear DS via Gaussian Mixture Regression
[1] Khansari Zadeh, S. M. and Billard, A. (2011) IEEE Transactions on Robotics
Stable Estimator of Dynamical Systems (SEDS) Approach [1]
Demonstrations
Reproductions](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-11-320.jpg)
![12
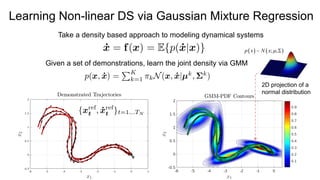
SEDS in Action
[2] Figueroa, Pais and Billard. (2016) ACM/IEEE HRI Conference
Demonstrations of Sequence of Point-to-Point Motions Execution of Sequence of Learned DS Motions
Learn a point-to-point SEDS for each Phase + impedance/force profiles [2]](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-13-320.jpg)
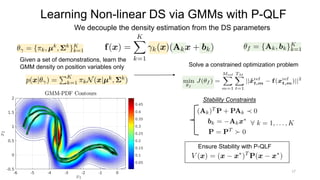
![18
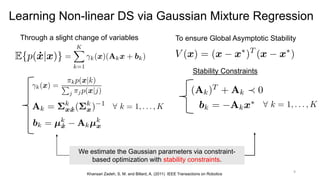
Learning Non-linear DS via GMMs with P-QLF
[3] Mirrazavi, BIllard. (2018) EPFL PhD Thesis.
Linear Parameter Varying (LPV) Dynamical Systems (DS) Approach [2]](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-18-320.jpg)
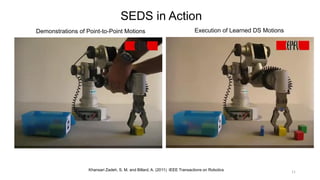
![Other SEDS-based Extensions – beyond QLF
Tau-SEDS Approach [4]:
Based on Diffeomorphic Transformations
And Complex Lyapunov Functions
23[4] Neumann, Steil (2015) Robotics and Autonomous Systems
Step 1: Construct a Lyapunov Candidate
Function Consistent with the Demonstrations
Weighted Sum of Asymmetric
Quadratic Functions (WSAQF) [5]
[5] Khansari, Billard (2015) Robotics and Autonomous Systems](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-23-320.jpg)
![Other SEDS-based Extensions – beyond QLF
Tau-SEDS Approach [4]:
Based on Diffeomorphic Transformations
And Complex Lyapunov Functions
24
Step 2: Define a diffeomorphism where
takes the form of a QLF
Step 3: Transform the demonstrations via
Step 4: Learn SEDS on transformed data.
Step 1: Construct a Lyapunov Candidate
Function Consistent with the Demonstrations
[4] Neumann, Steil (2015) Robotics and Autonomous Systems [5] Khansari, Billard (2015) Robotics and Autonomous Systems](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-24-320.jpg)
![Other SEDS-based Extensions – beyond QLF
Tau-SEDS Approach [4]:
Based on Diffeomorphic Transformations
And Complex Lyapunov Functions
25
Step 2: Define a diffeomorphism where
takes the form of a QLF
Step 3: Transform the demonstrations via
Step 4: Learn SEDS on transformed data.
Step 5: Back-transform learn SEDS via
Step 1: Construct a Lyapunov Candidate
Function Consistent with the Demonstrations
[4] Neumann, Steil (2015) Robotics and Autonomous Systems [5] Khansari, Billard (2015) Robotics and Autonomous Systems](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-25-320.jpg)
![Other SEDS-based Extensions – beyond QLF
26
Contracting Dynamical Systems Primitives [5]
[6] Ravichandar, Salehi, Dani (2017) CoRL
Stability Constraints via
Partial Contraction Theory](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-26-320.jpg)
![Full List of Publications Mentioned in Lecture
27
[1] Khansari Zadeh, S. M. and Billard, A. (2011) Learning Stable Non-Linear Dynamical Systems with Gaussian
Mixture Models. IEEE Transaction on Robotics, vol. 27, num 5, p. 943-957.
[2] Figueroa, N., Pais, A. L. and Billard, A. (2016) Learning Complex Sequential Tasks from Demonstration: A
Pizza Dough Rolling Case Study. In Proc. of the 2016 ACM/IEEE International Conference on Human-Robot
Interaction. HRI Pioneers Workshop.
[3] Mirrazavi Salehian, S. S. (2018) Compliant control of Uni/ Multi- robotic arms with dynamical systems.
PhD Thesis.
[4] K. Neumann and J. J. Steil. (2015) Learning robot motions with stable dynamical systems under
diffeomorphic transformations. Robotics and Autonomous Systems, 70 (Supplement C):1 – 15
[5] Khansari Zadeh, S. M. and Billard, A. (2014) Learning Control Lyapunov Function to Ensure Stability of
Dynamical System-based Robot Reaching Motions. Robotics and Autonomous Systems
[6] H. Ravichandar, I. Salehi, and A. Dani. (2017) Learning partially contracting dynamical systems from
demonstrations. In Proceedings of the 1st Annual Conference on Robot Learning, vol. 78 of Proceedings of
Machine Learning Research, pp 369–378](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-27-320.jpg)
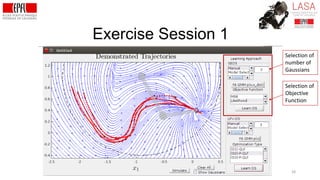
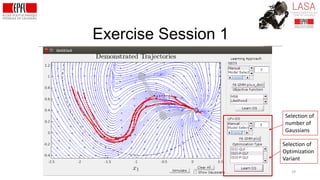
![Exercise Session 1
30
Selection of
Optimization
Variant
P is unknown, is estimated jointly with A’s.
P is known, it is estimated a priori via [5]
[5] Khansari, Billard (2015) Robotics and Autonomous Systems](https://image.slidesharecdn.com/learningupdated-180628115316/85/Lecture-1-Learning-Dynamical-Systems-from-Demonstrations-30-320.jpg)

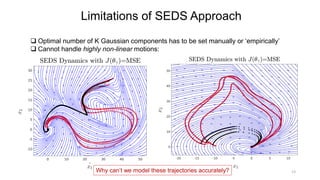
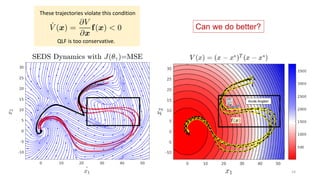
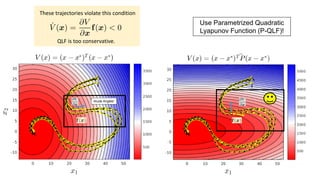
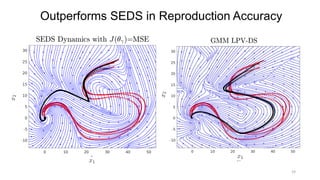
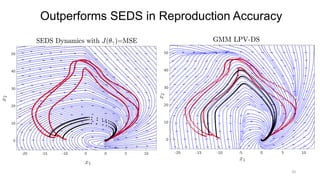
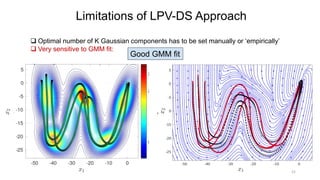
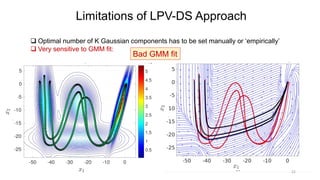
The document discusses different methods for learning dynamical systems from demonstrations, including using Gaussian mixture models with stability constraints, linear parameter varying dynamical systems, and extensions that use more complex Lyapunov functions. It compares the performance of these approaches and outlines their limitations, such as sensitivity to the number of Gaussian components and quality of the mixture model fit. A number of referenced publications are also listed that are relevant to dynamical system learning from demonstrations.


![[ICRA 2019] Lecture 1: Learning Dynamical Systems from Demonstrations](https://cdn.slidesharecdn.com/ss_thumbnails/learningicra2019-190531165418-thumbnail.jpg?width=640&height=640&fit=bounds)

![[ICRA 2019] Introduction to Tutorial on Dynamical System-based Learning from ...](https://cdn.slidesharecdn.com/ss_thumbnails/introductionicra2019-190531131514-thumbnail.jpg?width=640&height=640&fit=bounds)






![[ICRA 2019] Lecture 4: Locally Active Globally Stable Dynamical Systems](https://cdn.slidesharecdn.com/ss_thumbnails/lagsicra2019-190531170808-thumbnail.jpg?width=640&height=640&fit=bounds)



















![ANIMAL_CELL_,_TISSUE_AND_ORGAN_CULTURE[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/animalcelltissueandorganculture1-260204172026-4462b440-thumbnail.jpg?width=640&height=640&fit=bounds)















