Q-learning [Watkins andDayan 1992]
▶ DQN 元
▶ 一定 条件下 Q∗
収束
Input: γ, α
1: Initialize Q(s, a) arbitrarily
2: loop
3: Initialize s
4: while s is not terminal do
5: Choose a from s using policy derived from Q
6: Execute a, observe reward r and next state s′
7: Q(s, a) ← Q(s, a) + α[r + γ maxa′ Q(s′
, a′
) − Q(s, a)]
8: s ← s′
9: end while
10: end loop
参考文献 I
[1] FarnazAbtahi and Ian Fasel. “Deep belief nets as function approximators for
reinforcement learning”. In: AAAI 2011 Lifelong Learning Workshop (2011),
pp. 183–219.
[2] Bram Bakker. “Reinforcement Learning with Long Short-Term Memory”. In:
NIPS 2001. 2001.
[3] Marc C. Bellemare et al. “The arcade learning environment: An evaluation
platform for general agents”. In: Journal of Artificial Intelligence Research 47
(2013), pp. 253–279.
[4] Xiaoxiao Guo et al. “Deep learning for real-time Atari game play using offline
Monte-Carlo tree search planning”. In: Advances in Neural Information
Processing Systems (NIPS) 2600 (2014), pp. 1–9.
[5] Sergey Levine and Vladlen Koltun. “Guided Policy Search”. In: ICML 2013.
Vol. 28. 2013, pp. 1–9.
[6] Volodymyr Mnih et al. “Human-level control through deep reinforcement
learning”. In: Nature 518.7540 (2015), pp. 529–533.
[7] Volodymyr Mnih et al. “Playing Atari with Deep Reinforcement Learning”.
In: NIPS 2014 Deep Learning Workshop. 2013, pp. 1–9. arXiv:
arXiv:1312.5602v1.
51.
参考文献 II
[8] ArunNair et al. “Massively Parallel Methods for Deep Reinforcement
Learning”. In: ICML Deep Learning Workshop 2015. 2015.
[9] Karthik Narasimhan, Tejas Kulkarni, and Regina Barzilay. Language
Understanding for Text-based Games Using Deep Reinforcement Learning.
2015. arXiv: arXiv:1506.08941v1.
[10] John Schulman et al. High-Dimensional Continuous Control Using
Generalized Advantage Estimation. 2015. arXiv: arXiv:1506.02438v1.
[11] John Schulman et al. “Trust Region Policy Optimization”. In: ICML 2015.
2015. arXiv: arXiv:1502.05477v1.
[12] David Silver. Deep Reinforcement Learning. ICLR 2015 Keynote.
http://www.iclr.cc/lib/exe/fetch.php?media=iclr2015:silver-
iclr2015.pdf. 2015.
[13] David Silver et al. “Deterministic Policy Gradient Algorithms”. In: ICML
2014. 2014, pp. 387–395.
[14] Nathan Sprague. “Parameter Selection for the Deep Q-Learning Algorithm”.
In: RLDM 2015. 2015.
[15] Bradly C. Stadie, Sergey Levine, and Pieter Abbeel. Incentivizing Exploration
In Reinforcement Learning With Deep Predictive Models. 2015. arXiv:
1507.00814v2.
52.
参考文献 III
[16] GeraldTesauro. “TD-Gammon, A Self-Teaching Backgammon Program,
Achieves Master-Level Play”. In: Neural Computation 6(2) (1994),
pp. 215–219.
[17] Christopher JCH Watkins and Peter Dayan. “Q-learning”. In: Machine
learning 8.3-4 (1992), pp. 279–292.
![話
DQN(Deep Q-Networks) [Mnih et al. 2013; Mnih et al.
2015]
▶ 説明
▶ 分析・改善・応用 紹介(本題)
▶ 2015 年 7 月 23 日時点 DQN 関連情報
機能 目指](https://image.slidesharecdn.com/slides-160221023135/85/DQN-5-320.jpg)
![話
DQN 毛色 異 深層強化学習(主 Policy Search 系)
▶ Deterministic Policy Gradient [Silver et al. 2014]
▶ Guided Policy Search [Levine and Koltun 2013]
▶ Trust Region Policy Optimization [Schulman et al. 2015b]
▶ Generalized Advantage Estimation [Schulman et al.
2015a]
▶ 話 ,説明 時間
▶ 別 機会 …](https://image.slidesharecdn.com/slides-160221023135/85/DQN-6-320.jpg)
![強化学習 概念(1)
▶ 方策(policy)
▶ 「 行動 選 」
▶ π : S → A
▶ 行動価値関数(action value function)
▶ 状態 s 行動 a 選 , 後方策 π 従 場合 ,
期待累積報酬
▶ Qπ(s, a) = E[rt + γrt+1 + γ2rt+2 + · · · | st = s, at = a, π]
▶ γ 割引率](https://image.slidesharecdn.com/slides-160221023135/85/DQN-9-320.jpg)
![強化学習 概念(2)
▶ 最適方策
▶ 期待累積報酬 最大化 方策 π∗
▶ 最適行動価値関数
▶ Q∗(s, a) = Qπ∗
(s, a) = maxπ Qπ(s, a)
▶ 求 ,π(s) = arg maxa Q∗(s, a) 最適
方策 求
▶ Bellman 最適方程式
▶ Q∗(s, a) = Es′ [r + γ maxa′ Q∗(s′, a′) | s, a]
▶ 行動価値関数 最適 必要十分条件
▶ 解 Q∗ 求](https://image.slidesharecdn.com/slides-160221023135/85/DQN-10-320.jpg)
![Q-learning [Watkins and Dayan 1992]
▶ DQN 元
▶ 一定 条件下 Q∗
収束
Input: γ, α
1: Initialize Q(s, a) arbitrarily
2: loop
3: Initialize s
4: while s is not terminal do
5: Choose a from s using policy derived from Q
6: Execute a, observe reward r and next state s′
7: Q(s, a) ← Q(s, a) + α[r + γ maxa′ Q(s′
, a′
) − Q(s, a)]
8: s ← s′
9: end while
10: end loop](https://image.slidesharecdn.com/slides-160221023135/85/DQN-11-320.jpg)
![Deep Q-learning
▶ 価値関数 DNN 近似
Q(s, a; θ) ≈ Q(s, a)
▶ 損失 定義
L(θ) = E[(r + γ max
a′
Q(s′
, a′
; θ) − Q(s, a; θ))2
]
∂L(θ)
∂θ
= E[(r + γ max
a′
Q(s′
, a′
; θ)−Q(s, a; θ))
∂Q(s, a; θ)
∂θ
]
▶ Stochastic Gradient Descent 最小化可能](https://image.slidesharecdn.com/slides-160221023135/85/DQN-12-320.jpg)
![何 新
▶ 価値関数 NN 近似?
▶ 昔 (有名 例:TD-Gammon [Tesauro 1994])
▶ 価値関数 DNN 近似?
▶ 何 deep 呼 ,Deep Belief Networks
使 [Abtahi and Fasel 2011]
▶ LSTM 使 古 [Bakker 2001]
▶ 学習 成功 工夫
▶ 重要
▶ 初 DQN 呼 [Silver 2015]](https://image.slidesharecdn.com/slides-160221023135/85/DQN-13-320.jpg)
![Experience Replay
▶ 経験 遷移 (st, at, rt, st+1) replay
memory D 蓄
▶ 損失 計算 Q 更新 D
上 行
L(θ) = Es,a,r,s′∼D[(r + γ max
a′
Q(s′
, a′
; θ) − Q(s, a; θ))2
]](https://image.slidesharecdn.com/slides-160221023135/85/DQN-15-320.jpg)
![Target Q-Network
▶ 学習 目標値 計算 使 価値関数 固定(target
Q-network)
L(θ) = Es,a,r,s′∼D[(r + γ max
a′
Q(s′
, a′
; θ−
) − Q(s, a; θ))2
]
▶ 一定周期 学習中 Q-network 同期
θ−
← θ](https://image.slidesharecdn.com/slides-160221023135/85/DQN-16-320.jpg)
![報酬 clipping
▶ 報酬 [−1, 1] 範囲 clip
▶ 負 −1,正 1,0 0
▶ 報酬 大小 区別](https://image.slidesharecdn.com/slides-160221023135/85/DQN-17-320.jpg)
![Arcade Learning Environment(ALE) [Bellemare
et al. 2013]
図 [Mnih et al. 2013] 引用
▶ 家庭用 機 Atari 2600 +学習用
▶ 50 以上 対応
▶ 変動 読 取](https://image.slidesharecdn.com/slides-160221023135/85/DQN-18-320.jpg)
![DQN in ALE
図 [Mnih et al. 2015] 引用
▶ 図 畳 込 層 2 , [Mnih et al. 2015] 本文 読
3 !
▶ 入力 過去 4 画像,出力 18 行動価値](https://image.slidesharecdn.com/slides-160221023135/85/DQN-19-320.jpg)
![DQN vs. 人間
図 [Mnih et al. 2015] 引用](https://image.slidesharecdn.com/slides-160221023135/85/DQN-20-320.jpg)
![工夫 効果
表 [Silver 2015] 引用](https://image.slidesharecdn.com/slides-160221023135/85/DQN-21-320.jpg)
![DQN 超
▶ [Mnih et al. 2013] 学習率等 詳細 書
▶ 早 Theano DQN 再現 1
試
Nathan Sprague 氏 調
▶ (一方自分 AdaDelta 茶 濁 )
1
https://github.com/spragunr/deep_q_rl](https://image.slidesharecdn.com/slides-160221023135/85/DQN-23-320.jpg)
![DQN 超 分析 [Sprague 2015]
図 [Sprague 2015] 引用
DQN( [Mnih et al. 2013] 再現) 性能 超 設定 敏感
▶ α:学習率,γ:割引率,ρ:RMSprop 移動平均 減衰率
▶ target Q-network 未使用](https://image.slidesharecdn.com/slides-160221023135/85/DQN-24-320.jpg)
![Normalized DQN [Silver 2015]
報酬 clipping 代 ,報酬 学習
▶ 報酬 値 使
▶ Q(s, a; θ) 代
U(s, a; θ) ∈ [−1, +1]
出力
▶ 学習可能 π, σ Q 値 変換
Q(s, a; θ, σ, π) = σU(s, a; θ) + π](https://image.slidesharecdn.com/slides-160221023135/85/DQN-27-320.jpg)
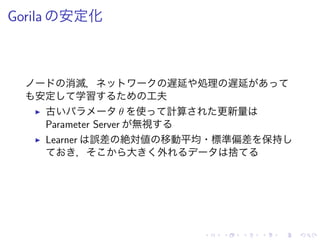
![Gorila(GOogle ReInforcement Learning Architecture)
[Nair et al. 2015]
図 [Nair et al. 2015] 引用
DQN 並列 実行 高速化
▶ Actor:行動 選 経験 (s, a, r, s′
) 積
▶ Memory:Actor 集 経験 蓄
▶ Learner:Memory 経験 更新量 計算
▶ Bundle:(Actor, Memory, Learner) 組](https://image.slidesharecdn.com/slides-160221023135/85/DQN-29-320.jpg)
![Gorila DQN vs. Single DQN
図 [Nair et al. 2015] 引用
▶ Single DQN:12-14 日間 訓練
▶ Gorila DQN:6 日間 訓練,100 bundles
▶ 49 中 41 Gorila DQN 勝利](https://image.slidesharecdn.com/slides-160221023135/85/DQN-31-320.jpg)
![ALE 先読
・将棋・囲碁 先読 (
木探索) 使 ,ALE ?
▶ 実 DQN 強 ! [Bellemare et al. 2013; Guo et al.
2014]
▶ 機能 状態 巻 戻 必要
▶ TAS
▶ 遅 (行動 選 数秒)
B. Rider Breakout Enduro Pong Q*bert Seaquest S. Invaders
DQN [Mnih et al. 2013] 4092 168 470 20 1952 1705 581
UCT [Guo et al. 2014] 7233 406 788 21 18850 3257 2354](https://image.slidesharecdn.com/slides-160221023135/85/DQN-33-320.jpg)
![UCC-I [Guo et al. 2014]
先読 選 行動 真似 訓練
▶ UCC-I(UCTtoClassification-Interleaved)
▶ 先読 教師 生成 , 学習
交互 繰 返
▶ 先読 始 位置 学習中
軌跡 選
▶ 教師 状態分布
際 状態分布 離
意図
▶ DQN [Mnih et al. 2013] 同 形状(=
同 速度) , 高 達成
B. Rider Breakout Enduro Pong Q*bert Seaquest S. Invaders
DQN [Mnih et al. 2013] 4092 168 470 20 1952 1705 581
UCT [Guo et al. 2014] 7233 406 788 21 18850 3257 2354
UCC-I [Guo et al. 2014] 5388 215 601 19 13189 2701 670](https://image.slidesharecdn.com/slides-160221023135/85/DQN-34-320.jpg)
![Exploration Bonus [Stadie et al. 2015]
選 状態・行動対 報酬 R(s, a)
N(s, a) 加 学習
▶ 次 状態 予測 M 学習 ,予測誤差 大
大 与
e(s, a) = ∥σ(s′
) − M(σ(s), a)∥2
2
¯e(s, a) = et(s, a)/maxe
N(s, a) =
¯e(s, a)
t ∗ C
▶ σ : S → RN 状態 特徴表現,maxe e
値 最大値,t 数,C 定数
▶ σ,M 学習](https://image.slidesharecdn.com/slides-160221023135/85/DQN-37-320.jpg)
![Exploration Bonus vs. Plain DQN
表 [Stadie et al. 2015] 引用
▶ Static AE(Auto Encoder):DQN 学習前 学習 AE σ
使
▶ Dynamic AE:AE DQN 学習 合 更新](https://image.slidesharecdn.com/slides-160221023135/85/DQN-38-320.jpg)
![図 [Narasimhan et al. 2015] 引用
▶ 状態:画像 文章
▶ 行動:動詞 目的語](https://image.slidesharecdn.com/slides-160221023135/85/DQN-41-320.jpg)
![LSTM-DQN [Narasimhan et al. 2015]
図 [Narasimhan et al. 2015] 引用
▶ LSTM(Long Short-Term Memory) 文章 状態表現 落
▶ 単語 word embedding 前 順 入力 ,最後 出
力 平均
▶ word embedding 一緒 学習
▶ Q(s, a)(動詞) Q(s, o)(目的語) 2 出力 学習](https://image.slidesharecdn.com/slides-160221023135/85/DQN-42-320.jpg)
![LSTM-DQN vs. BOW-DQN
図 [Narasimhan et al. 2015] 引用
▶ Fantasy World Evennia2
▶ 語彙数:1340
▶ 組 合 数:222
▶ 1 epoch = 20 episodes × 250 steps
▶ BOG(Bag-of-Words) 良 性能
2
http://www.evennia.com/](https://image.slidesharecdn.com/slides-160221023135/85/DQN-43-320.jpg)
![LSTM-DQN Word Embeddings
図 [Narasimhan et al. 2015] 引用](https://image.slidesharecdn.com/slides-160221023135/85/DQN-44-320.jpg)

![参考文献 I
[1] Farnaz Abtahi and Ian Fasel. “Deep belief nets as function approximators for
reinforcement learning”. In: AAAI 2011 Lifelong Learning Workshop (2011),
pp. 183–219.
[2] Bram Bakker. “Reinforcement Learning with Long Short-Term Memory”. In:
NIPS 2001. 2001.
[3] Marc C. Bellemare et al. “The arcade learning environment: An evaluation
platform for general agents”. In: Journal of Artificial Intelligence Research 47
(2013), pp. 253–279.
[4] Xiaoxiao Guo et al. “Deep learning for real-time Atari game play using offline
Monte-Carlo tree search planning”. In: Advances in Neural Information
Processing Systems (NIPS) 2600 (2014), pp. 1–9.
[5] Sergey Levine and Vladlen Koltun. “Guided Policy Search”. In: ICML 2013.
Vol. 28. 2013, pp. 1–9.
[6] Volodymyr Mnih et al. “Human-level control through deep reinforcement
learning”. In: Nature 518.7540 (2015), pp. 529–533.
[7] Volodymyr Mnih et al. “Playing Atari with Deep Reinforcement Learning”.
In: NIPS 2014 Deep Learning Workshop. 2013, pp. 1–9. arXiv:
arXiv:1312.5602v1.](https://image.slidesharecdn.com/slides-160221023135/85/DQN-50-320.jpg)
![参考文献 II
[8] Arun Nair et al. “Massively Parallel Methods for Deep Reinforcement
Learning”. In: ICML Deep Learning Workshop 2015. 2015.
[9] Karthik Narasimhan, Tejas Kulkarni, and Regina Barzilay. Language
Understanding for Text-based Games Using Deep Reinforcement Learning.
2015. arXiv: arXiv:1506.08941v1.
[10] John Schulman et al. High-Dimensional Continuous Control Using
Generalized Advantage Estimation. 2015. arXiv: arXiv:1506.02438v1.
[11] John Schulman et al. “Trust Region Policy Optimization”. In: ICML 2015.
2015. arXiv: arXiv:1502.05477v1.
[12] David Silver. Deep Reinforcement Learning. ICLR 2015 Keynote.
http://www.iclr.cc/lib/exe/fetch.php?media=iclr2015:silver-
iclr2015.pdf. 2015.
[13] David Silver et al. “Deterministic Policy Gradient Algorithms”. In: ICML
2014. 2014, pp. 387–395.
[14] Nathan Sprague. “Parameter Selection for the Deep Q-Learning Algorithm”.
In: RLDM 2015. 2015.
[15] Bradly C. Stadie, Sergey Levine, and Pieter Abbeel. Incentivizing Exploration
In Reinforcement Learning With Deep Predictive Models. 2015. arXiv:
1507.00814v2.](https://image.slidesharecdn.com/slides-160221023135/85/DQN-51-320.jpg)
![参考文献 III
[16] Gerald Tesauro. “TD-Gammon, A Self-Teaching Backgammon Program,
Achieves Master-Level Play”. In: Neural Computation 6(2) (1994),
pp. 215–219.
[17] Christopher JCH Watkins and Peter Dayan. “Q-learning”. In: Machine
learning 8.3-4 (1992), pp. 279–292.](https://image.slidesharecdn.com/slides-160221023135/85/DQN-52-320.jpg)






![[DL輪読会]Neural Ordinary Differential Equations](https://cdn.slidesharecdn.com/ss_thumbnails/nnasode1-190111001755-thumbnail.jpg?width=640&height=640&fit=bounds)


![[GTCJ2018]CuPy -NumPy互換GPUライブラリによるPythonでの高速計算- PFN奥田遼介](https://cdn.slidesharecdn.com/ss_thumbnails/gtcj2018cupypfnryosukeokuta-181009073034-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...](https://cdn.slidesharecdn.com/ss_thumbnails/20190426akuzawa-190426020057-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets](https://cdn.slidesharecdn.com/ss_thumbnails/20220325okimura-220405024717-thumbnail.jpg?width=640&height=640&fit=bounds)

































