Її величність - українська книга презентація-огляд 2024.pptx
л2 статика 2017
1. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 25
ЛЕКЦІЯ 2. ПЛОСКА СИСТЕМА ЗБІЖНИХ СИЛ.
1. Види в’язей та їх реакції.
2. Збіжні сили. Геометричний спосіб додавання сил.
3. Розкладання сил. Проекція сили на вісь і на площину.
4. Аналітичний спосіб задавання та додавання сил.
1. Види в’язей та їх реакції.
Починаючи розглядати вказане питання, згадаємо, що реакція в’язі – це
сила, яка визначає механічну взаємодію між невільним тілом та накладеною
на нього в’яззю. Тобто для однозначного визначення реакції в’язі необхідно
знати три її параметри: модуль, лінію дії та точку прикладання.
Сила реакції направлена в сторону, протилежну тій, куди в’язь не дає
змоги рухатися тілу. Коли в’язь одночасно перешкоджає рухові тіла по
декількох напрямках, то напрям реакції в’язі невідомий. У загальному
випадкові реакція тієї чи іншої в’язі найчастіше позначається символом
(літерою) R з відповідним індексом.
Розглянемо деякі види в’язей і з’ясуємо найголовніші властивості їх
реакцій.
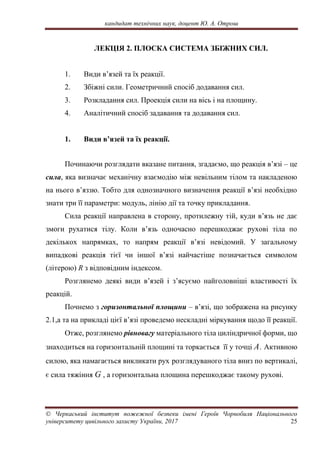
Почнемо з горизонтальної площини – в’язі, що зображена на рисунку
2.1,а та на прикладі цієї в’язі проведемо нескладні міркування щодо її реакції.
Отже, розглянемо рівновагу матеріального тіла циліндричної форми, що
знаходиться на горизонтальній площині та торкається її у точці A. Активною
силою, яка намагається викликати рух розглядуваного тіла вниз по вертикалі,
є сила тяжіння G , а горизонтальна площина перешкоджає такому рухові.
2. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 26
Рисунок 2.1. В’язь у вигляді горизонтальної площини
Якщо застосувати принцип звільнення від в’язей, то в точці торкання
тіла з площиною необхідно прикласти реакцію відкинутої площини. Тоді
розглядуване тіло стане умовно вільним тілом, яке перебуває у рівновазі під
дією двох сил. На підставі аксіоми 1 ці сили повинні бути рівними за
величиною, протилежними за напрямками й мати спільну лінію дії. Отже,
реакція горизонтальної площини направлена перпендикулярно до площини і
тому називається нормальною реакцією та позначається N.
При розв’язуванні багатьох практичних задач для економії часу, паперу
та чорнила можна не наводити два рисунки: спочатку невільне матеріальне
тіло, а потім – умовно вільне тіло. Достатньо зображувати і саму в’язь, і одразу
її реакцію.
Коли тертям між поверхнею (площиною) та розглядуваним тілом
нехтують, то така площина (поверхня) називається ідеально гладенькою.
1. В’язь у вигляді ідеально гладенької поверхні (площини).
У цьому випадкові невільне матеріальне тіло може вільно ковзати по
зазначеній поверхні й тому її реакція N (або R ) завжди прикладена до тіла в
точці його дотику до в’язі та направлена по нормалі до опорної поверхні.
2. Точкова опора (без тертя).
3. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 27
Точкова опора (див. на рис. 2.2,б) також є частковим випадком ідеально
гладенької поверхні (площини). Винесена точкова опора в окремий вид в’язі,
тому що в цьому випадку неможливо провести нормаль до опорної поверхні,
а реакція виявляється прикладеною в точці дотику тіла до опори та
направленою по нормалі до поверхні самого тіла.
Рисунок 2.2. В’язі у вигляді ідеально гладенької поверхні (площини) і
точкова опора та їх реакції.
3. Гнучка в’язь (нитка, канат, трос, ланцюг, дріт тощо)
У теоретичній механіці всі такі в’язі розглядаються як невагомі та
нерозтяжні.
Реакція гнучкої в’язі, яка зазвичай позначається T , прикладена в точці
підвішування тіла і спрямована вздовж самої в’язі завжди від тіла, рух якого
розглядувана в’язь обмежує (рис. 2.3).
Фізична особливість будь-якої гнучкої в’язі полягає в тому, що вона
чинить протидію тільки дії розтягу. Отже, реакція такої в’язі не дорівнює
нулеві, лише коли сама в’язь перебуває у стані розтягу.
4. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 28
Рисунок 2.3. Гнучкі в’язі та їх реакції
4. В’язь у вигляді циліндричного шарніра.
Якщо два тіла, наприклад, дві рейки A та B з’єднані між собою болтом
C, що проходить через отвори в цих тілах (рис. 2.4,а), та можуть обертатися
навколо осі з’єднувального болта, рухаючись при цьому в площинах, які
перпендикулярні до осі болта, то таке з’єднання називається циліндричним
шарнірним; осьова лінія болта називається віссю циліндричного шарніра (у
такому разі говорять, що рейки A та B з’єднані циліндричним шарніром).
Рисунок 2.4. Приклади шарнірних з’єднань
5. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 29
Прикладом шарнірного з’єднання є також з’єднання за допомогою
підшипника. Так, якщо вал A закріплено у внутрішній обоймі підшипника D ,
а зовнішня обойма його закріплена, на- приклад, у нерухомому корпусі B
(рис. 2.4,б), то вважається, що вал A і корпус B з’єднані шарніром D .
Якщо тертям у шарнірному з’єднанні нехтують, то такий шарнір
уважають ідеальним. Якщо розмірами шарніра нехтують, то такий шарнір
називається точковим. У теоретичній механіці всі шарнірні з’єднання
вважають ідеальними та точковими.
З визначення статики очевидно, що в задачах статики розглядають
тільки нерухомі шарніри. Будь-яке матеріальне тіло, що закріплене до певної
нерухомої поверхні циліндричним шарніром, може як завгодно обертатися
навколо осі шарніра.
5. В’язь у вигляді ідеального стержня (стержневав’язь).
Ідеальний стержень (стержнева в’язь) – це тонкий невагомий абсолютно
твердий стержень, що має на кінцях ідеальні точкові шарніри, навантаження
до якого може бути прикладене не лише в кінцевих шарнірах.
У певному розумінні стержнева в’язь є узагальненням гнучкої в’язі. На
відміну від гнучкої в’язі ідеальні стержні можуть бути як розтягнутими, так і
стиснутими.
6. Шарнірно-нерухома опора.
Один з можливих варіантів конструкції шарнірно-нерухомої опори
наведено на рисунку 2.5. Ця опора дає можливість повороту балки 1 (або
іншого закріпленого матеріального тіла) навколо осі шарніра 4 опори, але не
дає змоги ніяких переміщень самого шарніра 4. Інколи таку опору називають
нерухомим шарніром, оскільки за механічним змістом шарнірно-нерухома
опора нічим не відрізняється від в’язі у вигляді нерухомого циліндричного
шарніра.
6. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 30
Рисунок 2.5. Конструкція шарнірно-нерухомої опори (варіант)
Схематичні зображення шарнірно-нерухомих опор подано на рисунку
2.6. На рисунку 2.6,а та 2.6,б зображено застарілі позначення шарнірно-
нерухомих опор, які ще зустрічаються у різних підручниках і посібниках.
Рисунок 2.6. Схематичні позначення шарнірно-нерухомих опор
Рисунок 2.7. Реакція шарнірно-нерухомої опори
7. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 31
7. Шарнірно-рухома опора.
Один з можливих варіантів конструкції шарнірно-рухомої опори
наведено на рисунку 2.8.
Ця опора дає можливість повороту балки 1 навколо осі шарніра 4 та
поступального руху самої опори разом із шарніром 4 на деяку незначну
віддаль по опорній плиті 9. Зазначений поступальний рух відбувається за
рахунок перекочування металевої горизонтальної плити 3 на котках 8 (у
деяких випадках опорна плита 9 і, отже, вся шарнірно-рухома опора,
розташовується під певним кутом до горизонталі). Інша назва опори – рухомий
шарнір.
Реакція шарнірно-рухомої опори прикладена до тіла в опорному
шарнірі, напрямлена по нормалі до опорної поверхні в якомусь (чи
протилежному до нього) напрямку, а модуль її невідомий.
Розглянувши приклад автомобільного мосту через річку можна
побачити приклади виконання та використання шарнірно-рухомих і шарнірно-
нерухомих опор. Постає справедливе запитання: «Для чого в мостобудуванні
використовують обидва типи опор?».
Рисунок 2.8. Конструкція шарнірно-рухомої опори (варіант)
8. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 32
Рисунок 2.9. Схематичні позначення шарнірно-рухомих опор
Рисунок 2.10. Реакція шарнірно-рухомої опори
Для з’ясування відповіді розглянемо найпростішу конструкцію мосту,
що складається з простої балки, яка своїми кінцями спирається на дві опори.
Якщо одна з опор мосту є шарнірно-нерухомою, то вона забезпечує
загальну нерухомість мосту. Якщо інша опора – шарнірно-рухома, то при
незначній зміні довжини балки, наприклад, від зміни температури або при її
згинанні від діючого зовнішнього навантаження, ця опора відповідно
поступально переміщується. Це переміщення настільки незначне, що
користувачі мосту його ніяк не відчувають. Але це дає можливість уникати
9. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 33
додаткових напружень у балці. Використання в цьому випадку двох шарнірно-
нерухомих опор приводило б до виникнення великих напружень у балці або
до деформації чи навіть руйнування її.
8. Абсолютно жорстке закріплення.
Рисунок 2.11. Жорстке закріплення.
Кожна людина хоч раз у житті виходила на балкон багатоповерхового
будинку. Закріплення балкона і є прикладом абсолютно жорсткого затиснення.
Така опора не дозволяє ніяких переміщень закріпленого тіла.
2. Збіжні сили. Геометричний спосіб додавання сил.
Розв’язок багатьох задач механіки пов’язано з операцією додавання
векторів, зокрема сил. Вивчення статики почнемо з розгляду геометричного
способу додавання сил.
Величину, що дорівнює геометричній сумі сил будь-якої системи,
називають головним вектором даної системи сил:
n
FFFFR
...321
(1)
Поняття про геометричну суму сил не слід підміняти поняттям про
рівнодійну; для багатьох систем сил рівнодійної взагалі не існує, а
геометричну суму можна знайти завжди.
10. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 34
При вивченні статики ми послідовно будемо переходити від розгляду
більш простих систем до більш складних. Почнемо з розгляду системи
збіжних сил (сил, що збігаються).
Збіжними називають сили, лінії дії яких перетинаються в одній точці.
Якщо ми перенесемо всі сили даної системи по лініях їх дії в загальну точку
перетину цих ліній, то, згідно з першим наслідком з аксіом статики, дія
системи на абсолютно тверде тіло не зміниться (рис.2.12).
Рисунок 2.12 –Дія системи сил на абсолютно тверде тіло
Додавання двох сил. Геометричну суму R
двох сил 1
F
і 2
F
знаходять або за правилом паралелограма (рис.2.13, а), або побудовою
силового трикутника (рис.2.13, б), який зображує половину цього
паралелограма.
Модуль R визначають як сторону А1С1 трикутника А1В1С1 за допомогою
теореми косинусів:
cos2 21
2
2
2
1
2
FFFFR . (2)
Або (більш зручно для паралелограма)
cos2 21
2
2
2
1
2
FFFFR , (3)
1F
2F
3F
nF
R
Рис.2.1.1
11. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 35
Рисунок 2.13 –Додавання двох сил
де - кут між силами 1
F
і 2
F
.
Кути і , які сила R утворює з силами 1
F
і 2
F
, знаходять за теоремою
синусів:
sinsinsin
21
RFF
. (4)
Додавання трьох сил, що не лежать в одній площині.
Геометрична сума R
трьох сил 1
F
, 2
F
і 3
F
, що не лежать в одній площині,
зображують діагоналлю паралелепіпеду, який побудований на цих силах
(правило паралелепіпеду) (рис.2.14). У слушності цього переконуємося,
застосовуючи послідовно правило паралелограма.
Рисунок 2.14 –Додавання трьох сил, які не лежать в одній площині
B C B1 2F
C1
1F
R
1F
R
A 2F
D A1
а) б)
Рис.2.1.2
1F
R
А 2F
3F
Рис.2.1.3
12. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 36
Додавання системи сил. Геометрична сума (головний вектор)
будь-якої системи сил визначається або послідовним додаванням сил системи
за правилом паралелограму, або побудовою силового багатокутника. Другий
спосіб є більш простим і зручним. Для знаходження цим способом суми сил
1
F
, 2
F
, 3
F
, ..., n
F
(рис.2.15,а) відкладаємо від довільної точки О (рис.2.15,б)
вектор 1
F
, потім 2
F
і так далі.
З’єднуємо початок першого вектору з кінцем останнього і отримуємо
вектор R
, який зображує геометричну суму або головний вектор сил:
n
FFFR
...21
або k
FR
. (5)
Модуль і напрям вектора R
не залежить від порядку відкладання
векторів сил. Виконана побудова являє собою послідовне застосування
правила силового трикутника. Фігура, що побудована на рис.2.15, б
називається силовим (векторним) багатокутником. Таким чином,
геометрична сума або головний вектор декількох сил зображають стороною,
яка замикає силовий багатокутник, що побудований на цих силах. При
побудові векторного багатокутника слід пам’ятати, що всі стрілки векторів,
які додаються, повинні бути напрямлені в один бік (по обходу багатокутника),
а у вектора R
- в протилежний.
За наслідком з перших двох аксіом статики система збіжних сил, які
діють на абсолютно тверде тіло, еквівалентна системі сил, прикладених в
одній точці (точка А рис.2.156, а).
Таким чином, система збіжних сил має рівнодійну, яка дорівнює
геометричній сумі (головному вектору) цих сил, яка прикладена в точці їх
перетину. Якщо сили 1
F
, 2
F
, ..., n
F
збігаються в точці А, то сила, яка дорівнює
головному вектору R
прикладена в точці А, буде рівнодійною цієї системи
сил.
13. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 37
Рисунок 2.15 – Векторний багатокутник
3. Розкладання сил. Проекція сил на вісь і на площину.
По суті справи розкладання сил є задача обернена до додавання сил.
Розкласти дану силу на декілька складових – означає знайти таку систему сил
для яких дана сила є рівнодійною. Дана задача є невизначеною, оскільки за
даною діагоналлю можна побудувати безліч паралелограмів. Таким чином,
щоб розв’язок був визначеним, необхідно задати додаткові умови (розглянемо
розкладання на дві збіжні сили):
задавання двох напрямків, по яких повинні діяти складові;
задавання модуля і напрямку однієї із складових сил;
задавання модулів обох складових сил;
задавання модуля однієї складової сили і напрям другої.
Розглянемо перший випадок, як найбільш поширений. Силу F
необхідно розкласти на дві складові по напрямкам, що визначають прямі АВ і
AD (сила і прямі лежать в одній площині). Для розв’язку задачі проводимо
через початок і кінець сили F
прямі, паралельні АВ і AD.
3F
1F
2F
2F
1F
А О
3F
R
nF
R
nF
а) б)
Рис.2.1.4
14. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 38
Рисунок 2.16 –Розкладання сили на складові
Сили P
і Q
будуть складовими, які шукають, оскільки FQР
.
Розклад можна також провести побудовою силового трикутника (рис.2.16, б).
Для цього від довільної точки а відкладається сила F
і через її кінці проводять
прямі, які паралельні АВ і AD, до їх взаємного перетину. Знайдені сили P
і Q
замінюють силу F
, якщо їх прикласти до точки А або у будь-якій точці на лінії
дії сили F
.
Якщо задані напрямки не лежать в одній площині, то задача є
визначеною і приводиться до побудови такого паралелепіпеду, у якого
діагональ зображує задану силу F
, а ребра паралельні заданим напрямкам.
Перейдемо до розгляду аналітичного (чисельного) методу розв’язку
задач статики. Цей метод ґрунтується на понятті про проекцію сили на вісь. Як
і для будь-якого іншого вектору, проекцією сили на вісь називається скалярна
величина, яка дорівнює довжині відрізку, взятого з відповідним знаком, що
обмежується проекціями початку і кінця сили. Проекція має позитивний знак,
якщо переміщення від її початку до кінця відбувається в додатному напрямі
осі, і негативний знак – якщо у від’ємному. З означення випливає, що проекція
даної сили на будь-які паралельні й однаково направлені вісі рівні між собою.
B
C b Q
c
P
F
P
F
A Q
D a
a) б)
Рис.2.2.1
15. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 39
Цим зручно користуватися при обчисленні проекції сили на вісь, що не лежить
в одній площині із силою.
Позначати проекцію сили F
на вісь Ох будемо символом Fx. Тоді для
сил, які зображені на рисунку отримаємо:
abABFx
1
, edEDQx
1
. (6)
Але з рисунку також видно, що cos1
FAB , 1
coscos QQQx
, тобто проекція сили на вісь дорівнює добутку модуля сили на косинус кута
між напрямом сили і додатним напрямом осі. Зрозуміло, що проекція буде
позитивною, якщо кут між напрямом осі та напрямом сили буде гострий,
негативною, якщо цей кут – тупий; якщо сила перпендикулярна до осі, то її
проекція на вісь дорівнює нулю.
Проекцією сили F
на вісь Оху називається вектор 1
OBFxy
, який
обмежений проекціями початку і кінця сили F
на цю площину. Таким чином,
на відміну від проекції сили на вісь, проекція сили на
площину є величина векторна, оскільки вона
характеризується не тільки своїм чисельним
значенням, але і напрямком в площині Оху. За
модулем cosFFxy
, де – кут між напрямком сили
F
та її проекції xy
F
.
z B
F
A
O Fy y
Fx
xyF
B1
x
Рис.2.2.3
D
B Q
F
В1 1
A x D1 E x
O
a Fx b d Qx e x
Рис.2.2.2
16. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 40
У деяких випадках для знаходження проекції сили на вісь зручно знайти
спочатку проекцію сили на площину, у якій лежить ця вісь, а потім знайдену
проекцію на площину проектують на дану вісь. Наприклад випадок, що
зображено на рисунку, знаходять:
coscoscos FFF xyx ,
(7)
sincossin FFF xyy .
4. Аналітичний спосіб задавання та додавання сил.
Для аналітичного задавання
сили необхідно вибрати систему
координатних осей Oxyz, по
відношенню до якої буде визначатися
напрям сили у просторі.
Вектор, який зображує силу F
,
можна побудувати, якщо відомі
модуль цієї сили F і кути , , , які
сила утворює з даними осями координат. Задавання величин F, , , і
визначає дану силу F
. Точка А прикладання сили повинна бути задана
додатково її координати x, y, z.
Для розв’язку задач статики буває більш зручним задати силу її
проекціями. Сила F
буде задана, якщо будуть відомі її проекції Fx, Fy, Fz на
осі прямокутної декартової системи координат.
cosFFx
, cosFFy , cosFFz
. (8)
Якщо піднести ці рівності до квадрату і додати їх, то отримаємо
222
zyx
FFFF ; (9)
z
z
zF
F
y
xF
A yF
y
x
x
Рис.2.3.1
17. кандидат технічних наук, доцент Ю. А. Отрош
Черкаський інститут пожежної безпеки імені Героїв Чорнобиля Національного
університету цивільного захисту України, 2017 41
F
Fx
cos ,
F
Fy
cos ,
F
Fz
cos . (10)
Формули дозволяють знайти модуль сили F
і кути з осями, якщо відомі
проекції цієї сили на осі координат.
Аналітичний спосіб додавання сил. Перехід від залежності
між векторами до залежності між їх проекціями здійснюють за допомогою
такої теореми геометрії: проекція вектору суми на будь-яку вісь дорівнює
алгебраїчній сумі проекцій векторів, що додаються на ту саму вісь. Звідси
випливає, що якщо n
FFFR
...21
, то nxxxx
FFFR ...21
. Тобто для
будь-якої системи сил її головний вектор
n
k
k
FR
1
. Тоді згідно до теореми
n
k
kxx
FR
1
,
n
k
kyy
FR
1
,
n
k
kzz
FR
1
(11)
Якщо відомі Rx, Ry і Rz, то за формулами (10) знаходять:
222
zyx
RRRR (12)
R
Rx
cos ,
R
Ry
cos ,
R
Rz
cos (13)
Формули дозволяють розв’язати задачу про додавання сил аналітично.
Приклад Знайти рівнодійну трьох сил, що лежать в одній площині, якщо
відомо: F = 17.32 H, T = 10 H, P = 24 H, = 30, = 60/
Розв’язок:
cosFFx ,
(1)cosTTx ,
0xP ,
sinFFy ,
(2)
sinTTy ,
y
T
R
P
F
F
T
P
а) б)
18. Технічна механіка. Конспект лекцій. Статика.
Кафедра будівельних конструкцій, 2017 42
Обчислюємо проекції заданих сил на
осі координат:
Тоді за формулами (12, 13)
yyyy
xxxx
PTFR
PTFR
22
yx RRR ;
R
Rx
cos ;
R
Ry
cos .
Питання для самоконтролю
1. Що називають головним вектором системи сил?
2. Які сили називають збіжними?
3. Які існують правила додавання сил?
4. Як визначити модуль суми двох сил?
5. Як визначити кути між вектором суми та векторами, що
додаються?
6. Чому задача про розкладання сили на складові є невизначеною?
7. Які умови необхідно накласти, щоб задача про розкладання сили
на складові мала єдиний розв’язок?
8. Що називають проекцією сили на вісь? на площину?
9. Запишіть формули за якими розраховують проекції сили на вісь?
на площину?
10. У чому полягає аналітичний спосіб задавання сил?
11. У чому полягає аналітичний спосіб додавання сил?
PPy .