Download as PDF, PPTX
![Chapter 1 : Signals And Systems
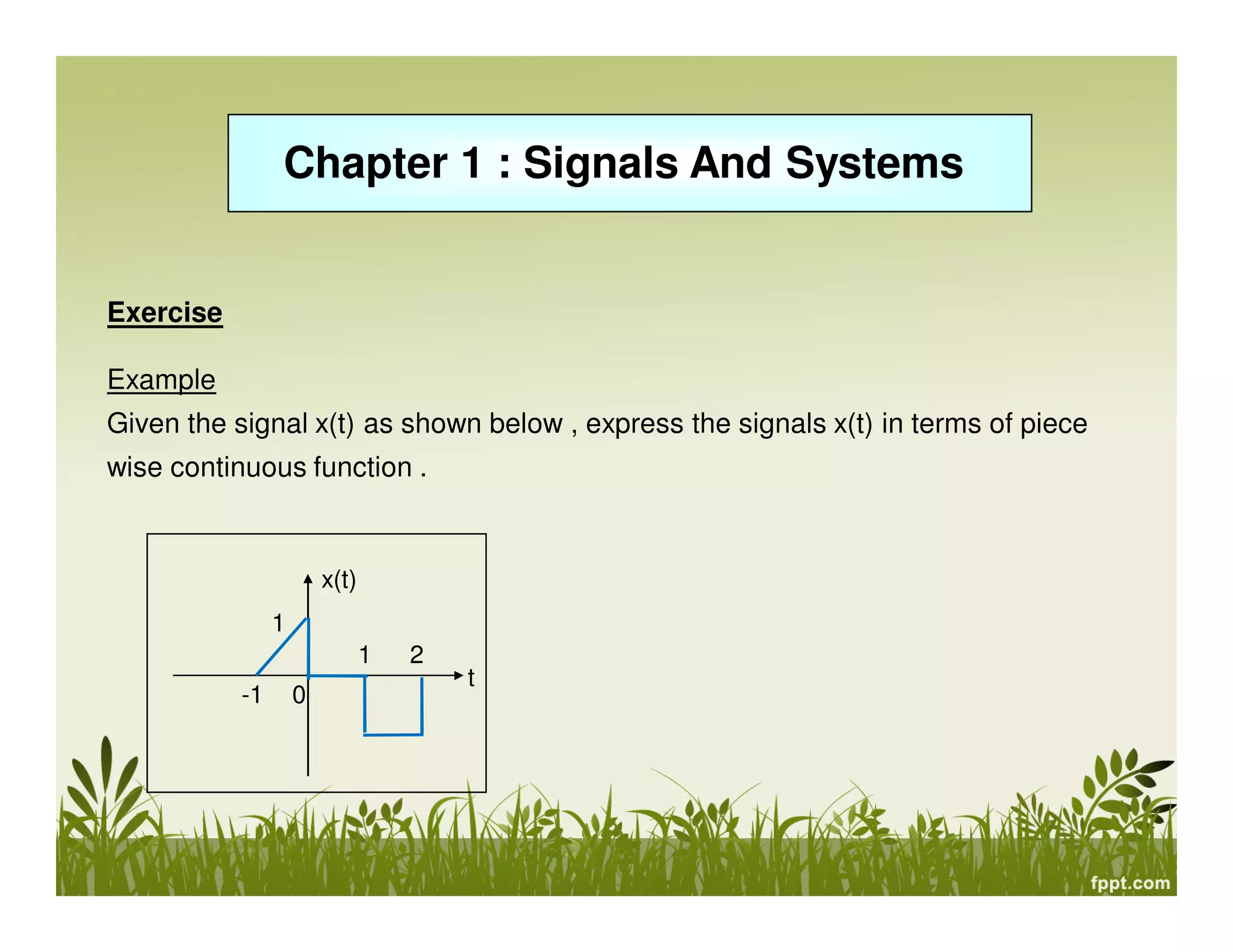
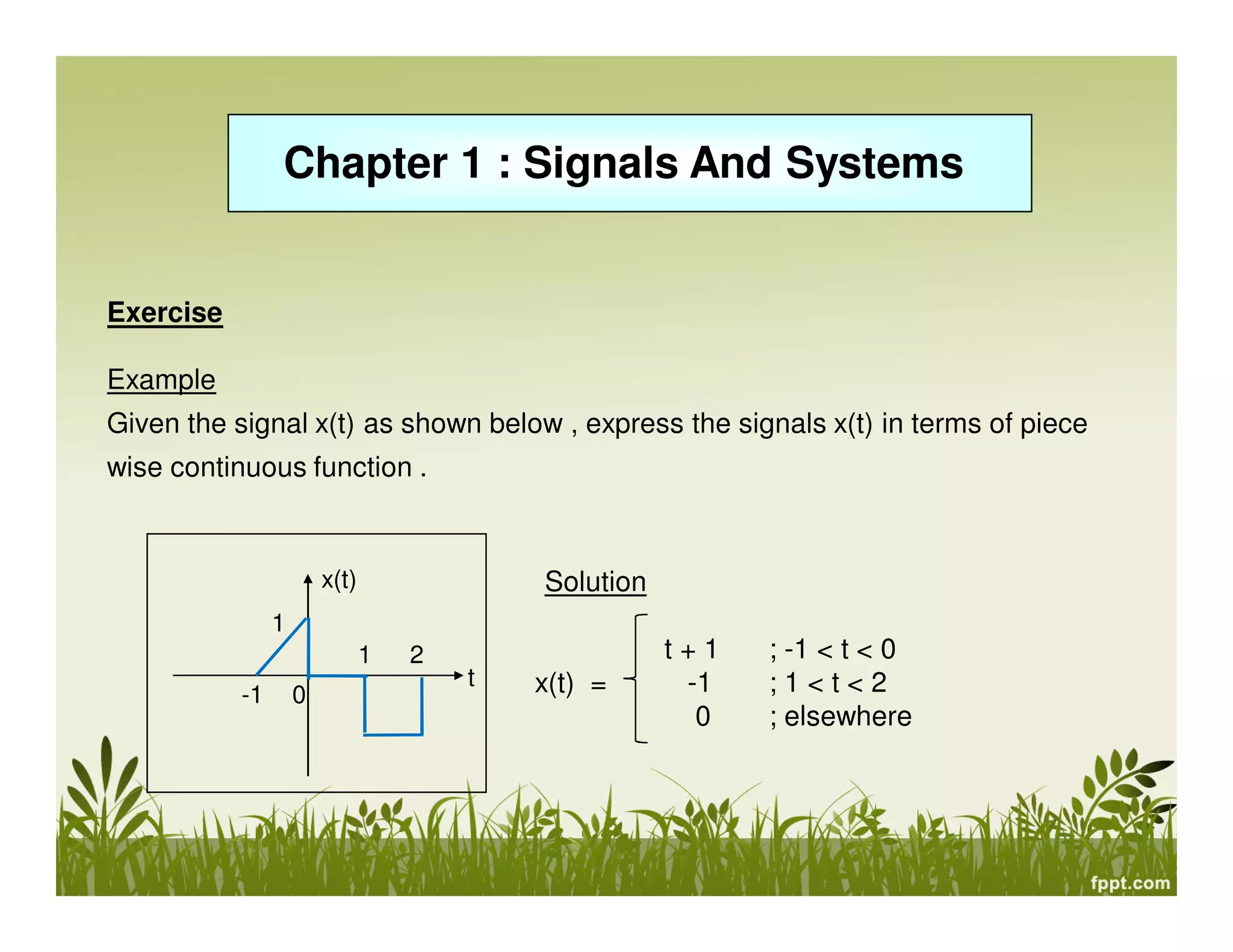
Exercise 1
•
Determine whether listed x(t) below is periodic or aperiodic signal. If a signal is
periodic, determine its fundamental period.
T=
a) x(t) = sin 3t
b) x(t) = 2 cos 8πt
c) x(t) = 3 cos (5πt + π/2)
d) x(t) = cos t + sin √2 t
e) x(t) = sin2t
j[(π/2)t-1]
f) x(t) = e
2π
ω0](https://image.slidesharecdn.com/signalsandsystemschapter1-131124023113-phpapp01/75/Signals-and-systems-chapter-1-21-2048.jpg)
![EXERCISE 2
a)
b)
c)
d)
j(π/4)n
x[n]=e
x[n]=cos1/4n
x[n]= cos π/3 n + sin π/4n
x[n]=cos2π/8n](https://image.slidesharecdn.com/signalsandsystemschapter1-131124023113-phpapp01/75/Signals-and-systems-chapter-1-22-2048.jpg)
![Chapter 1 : Signals And Systems
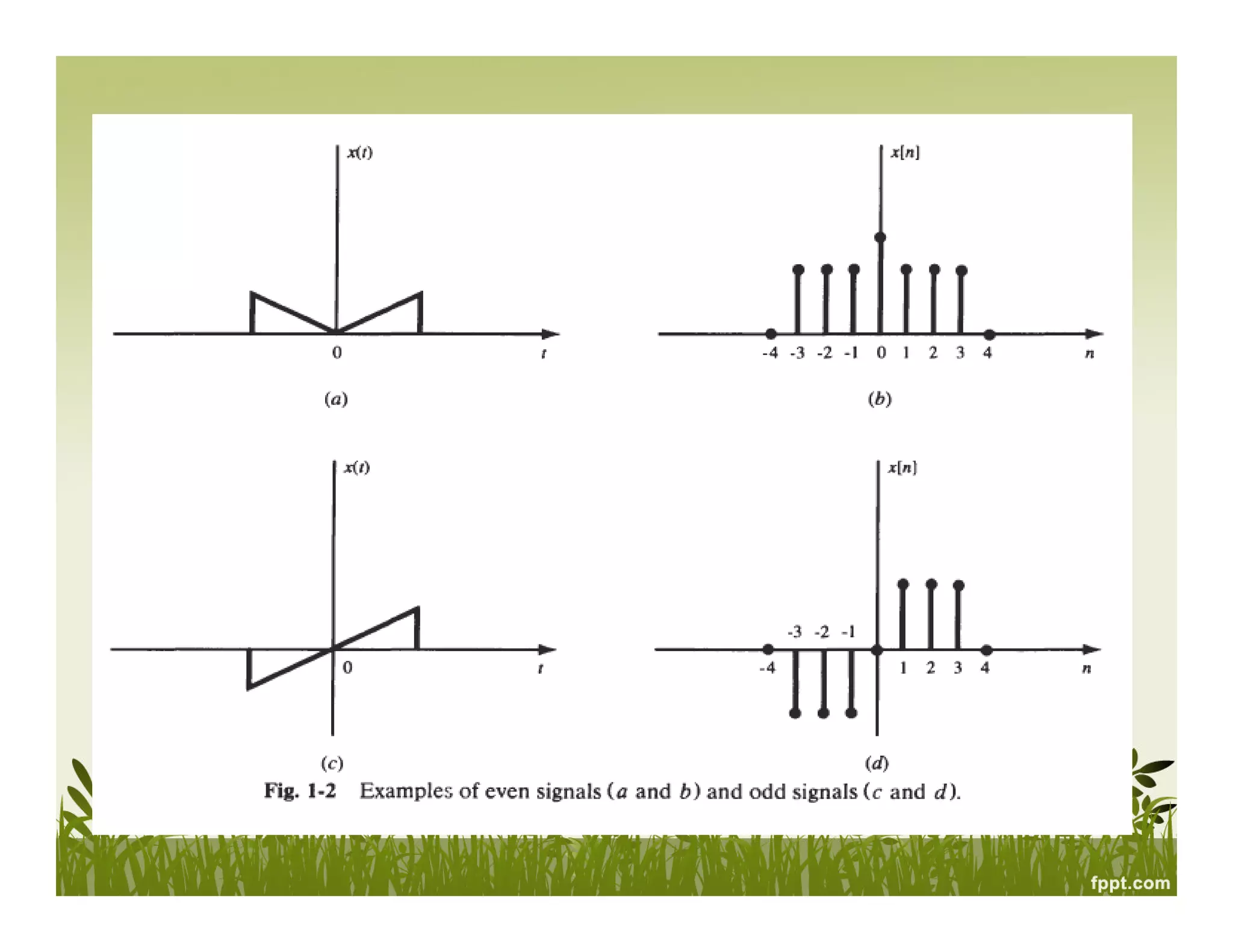
• Even and Odd
A signal x ( t ) or x[n] is referred to as an even signal if
x(-t)=x(r)
x[-n]=x[n]
A signal x ( t ) or x[n] is referred to as an odd signal if
x(-t)=-x(t)
x[-n]=-x[n]
Examples of even and odd signals are shown in Fig. 1-2.](https://image.slidesharecdn.com/signalsandsystemschapter1-131124023113-phpapp01/75/Signals-and-systems-chapter-1-25-2048.jpg)
![Chapter 1 : Signals And Systems
2.0 Classification Of System
4) a) Linear
: y(t) = ay1(t) + by2(t) (superposition applied)
b) Non linear : y(t) ≠ ay1(t) + by2(t) (superposition not applied )
where :
If an excitation x1[t] causes a response y1[t] and an excitation x2 [t] causes a
response y2[n] , then an excitation :
x [t = ax1[t] + bx2[t]
will cause the response
y [t] = ay1[t] + by2[t]
(to be presented as y(t) in solution)](https://image.slidesharecdn.com/signalsandsystemschapter1-131124023113-phpapp01/75/Signals-and-systems-chapter-1-50-2048.jpg)

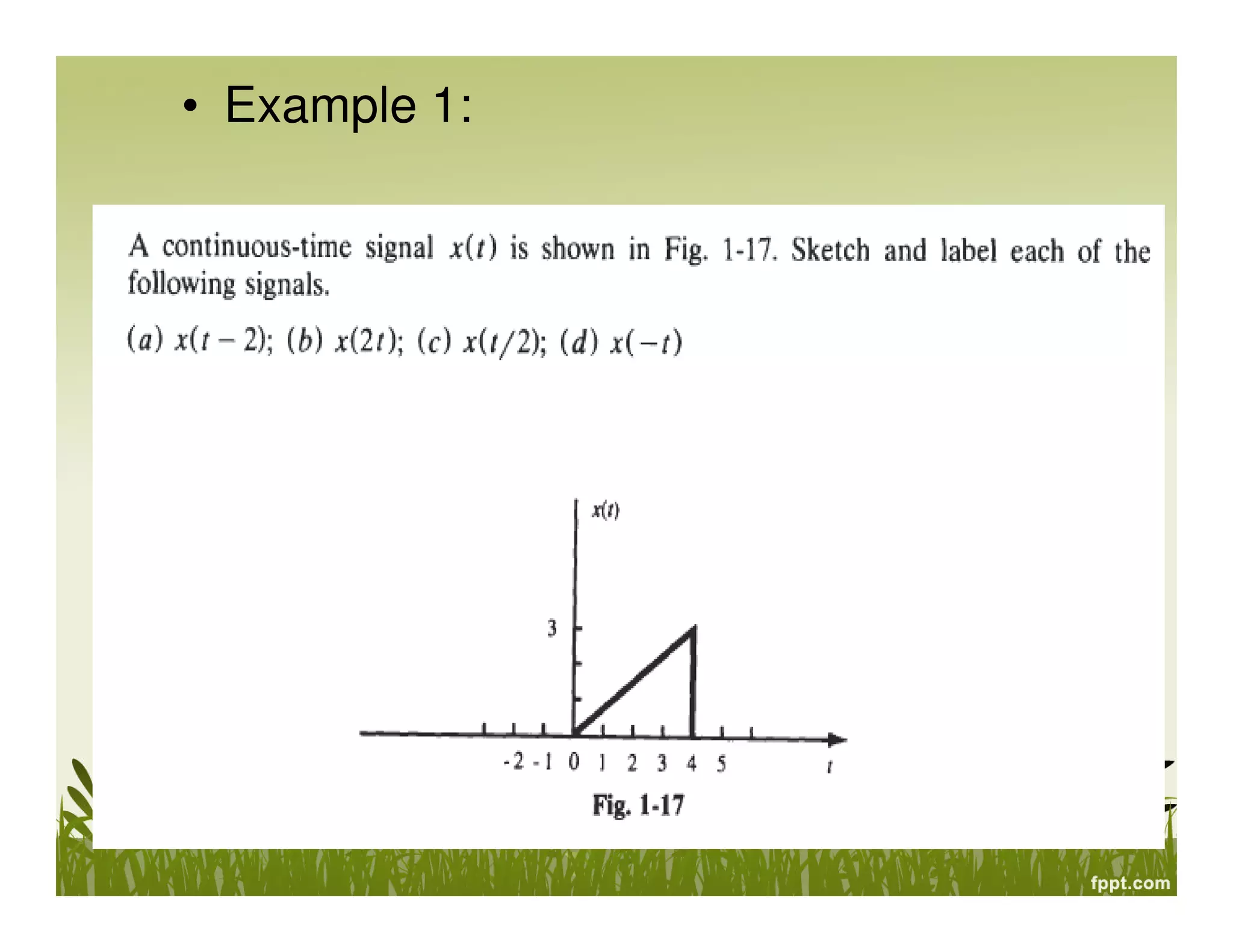
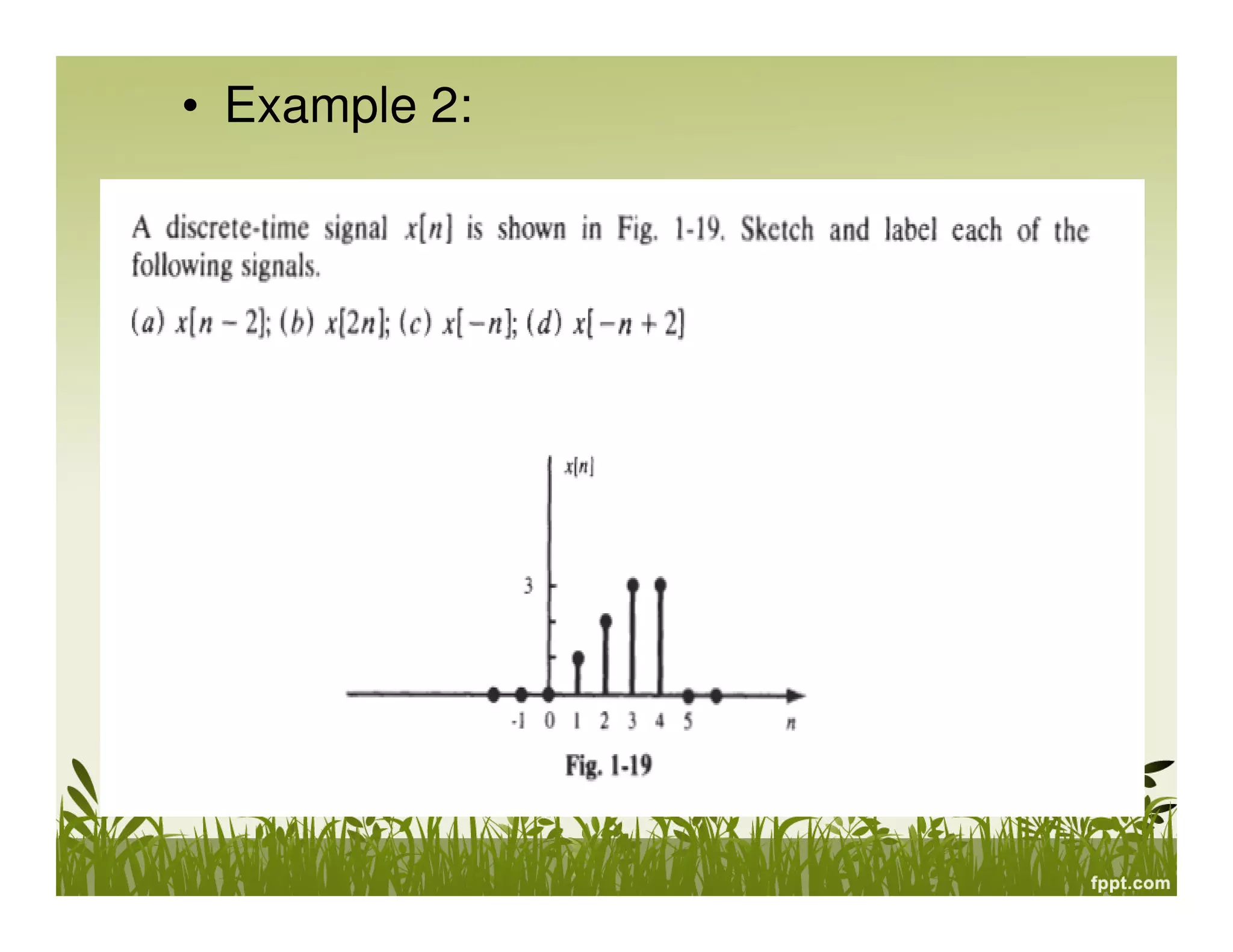
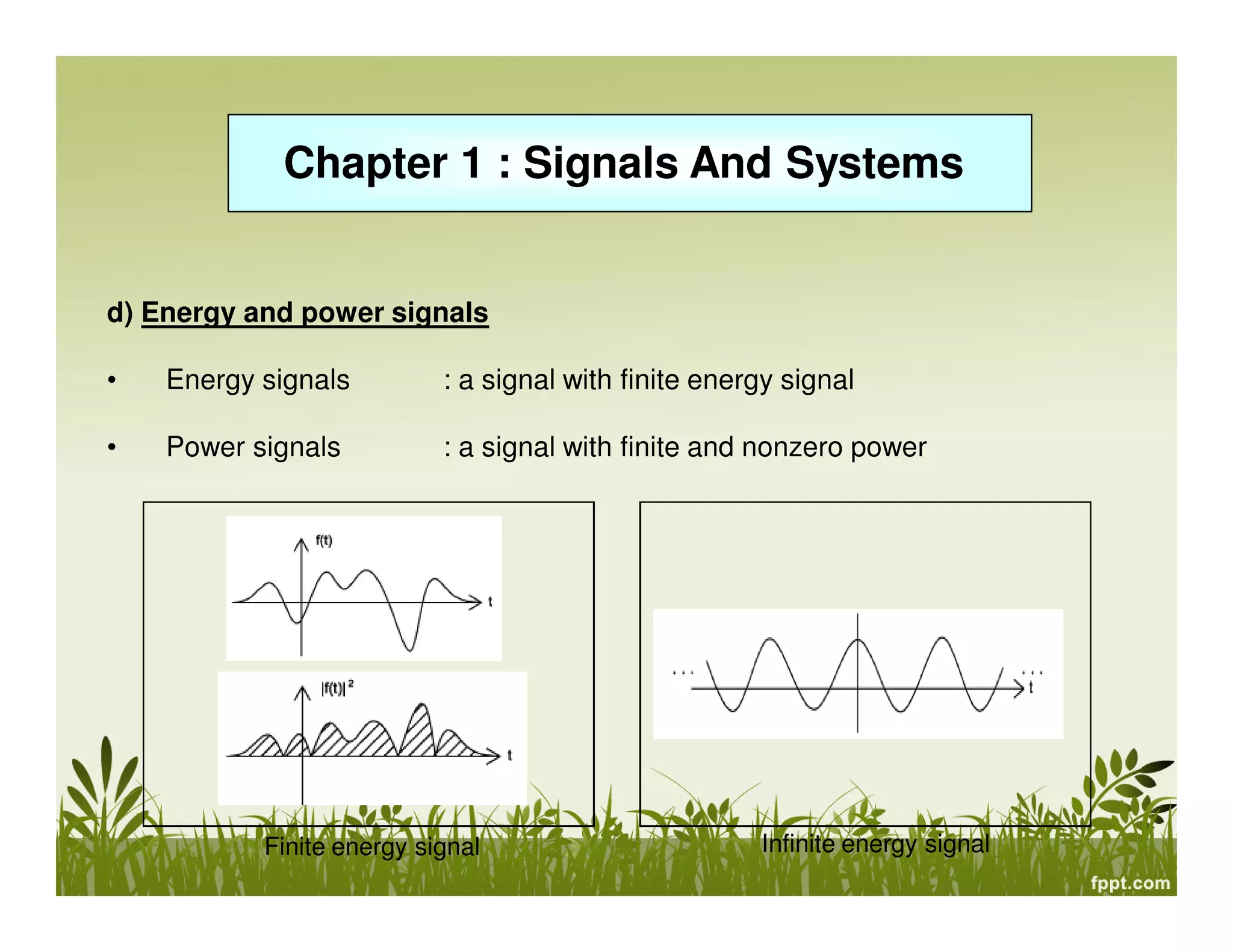
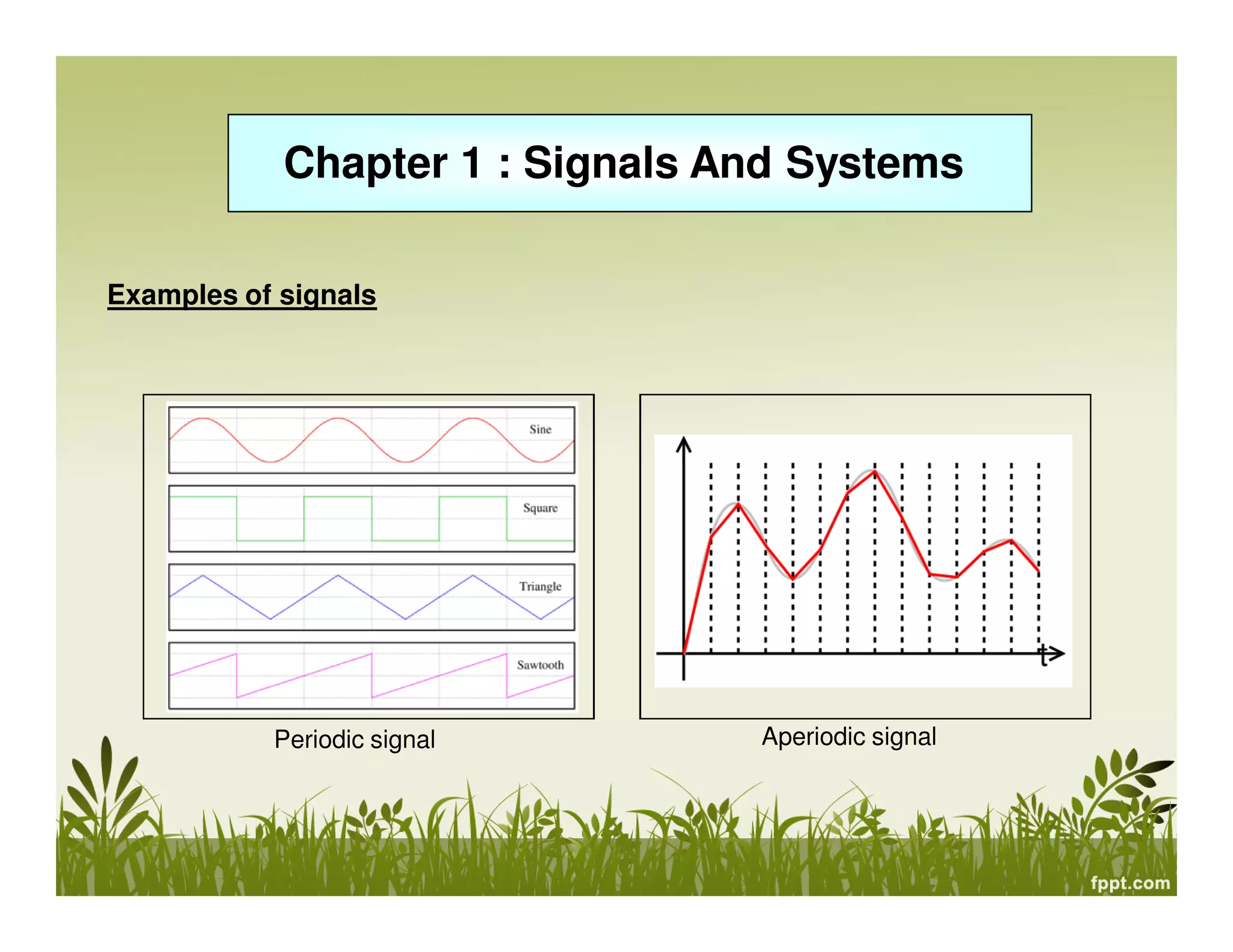
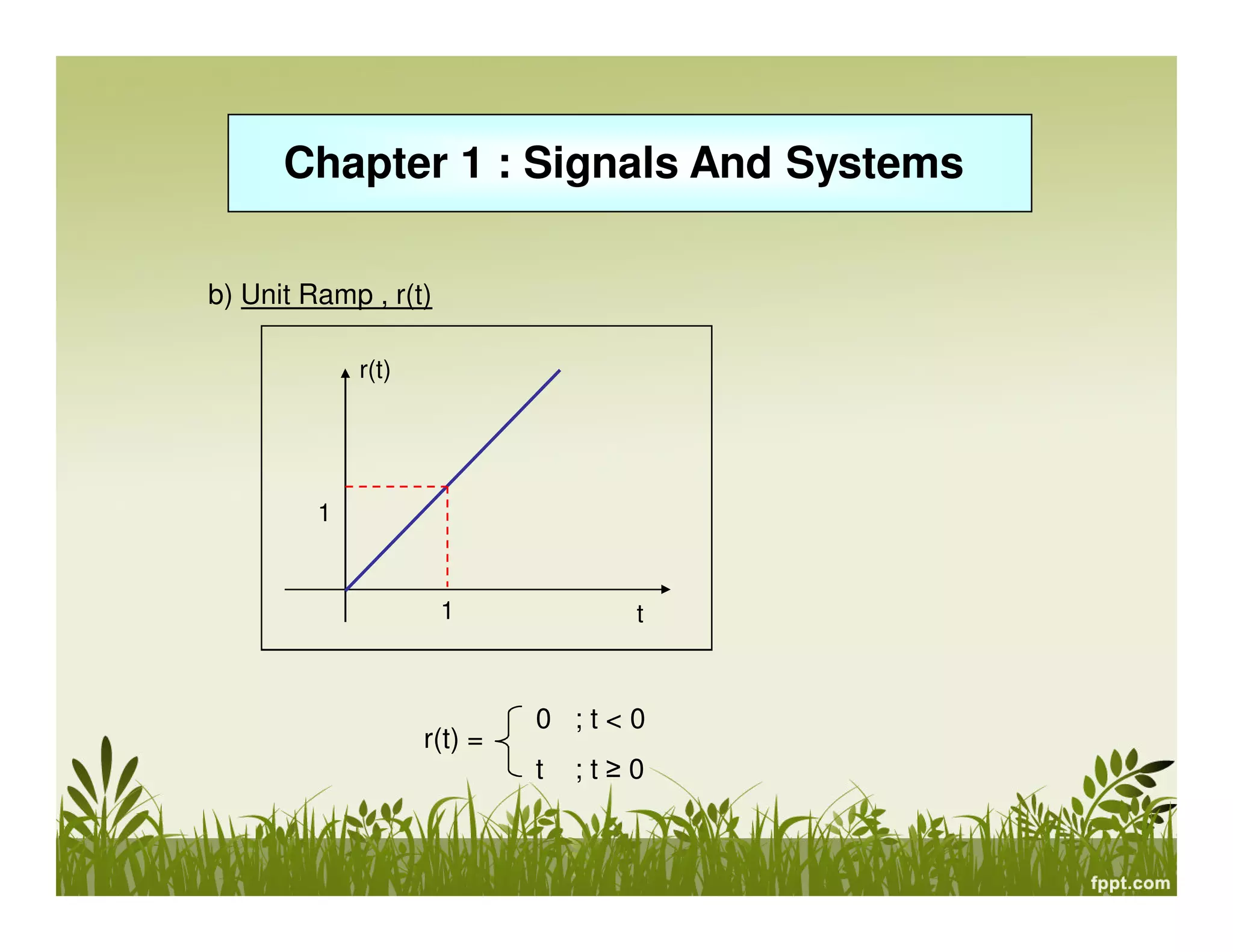
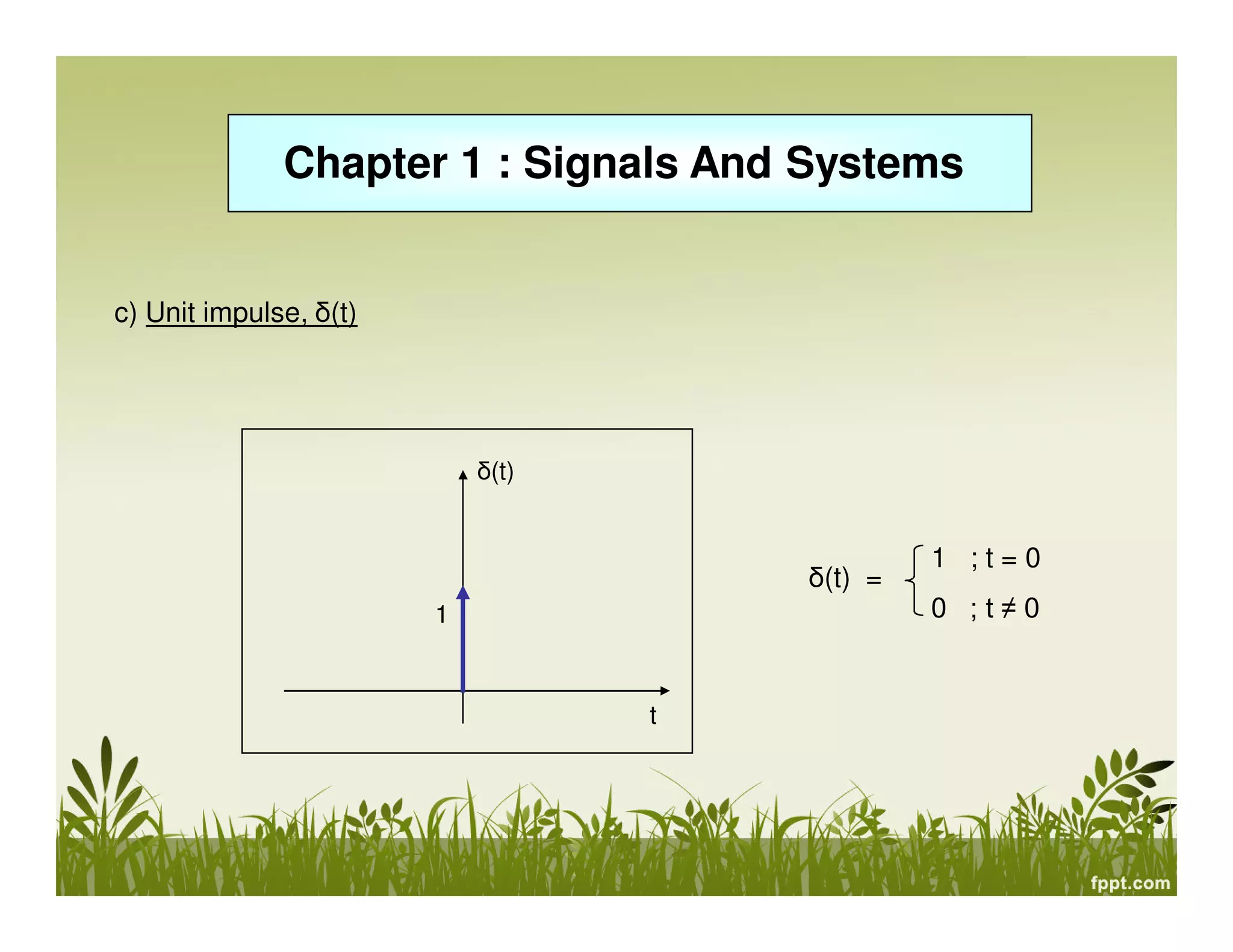
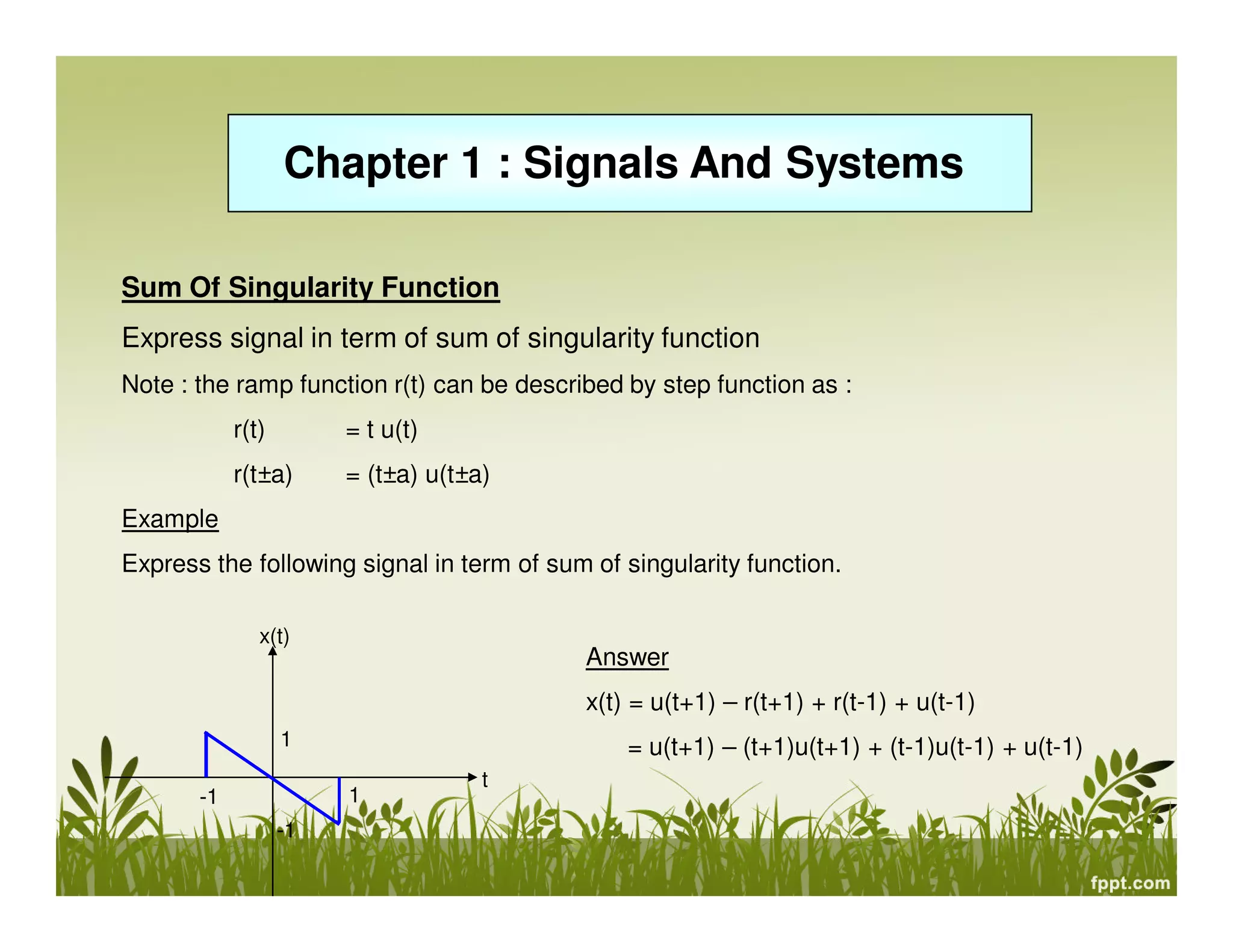
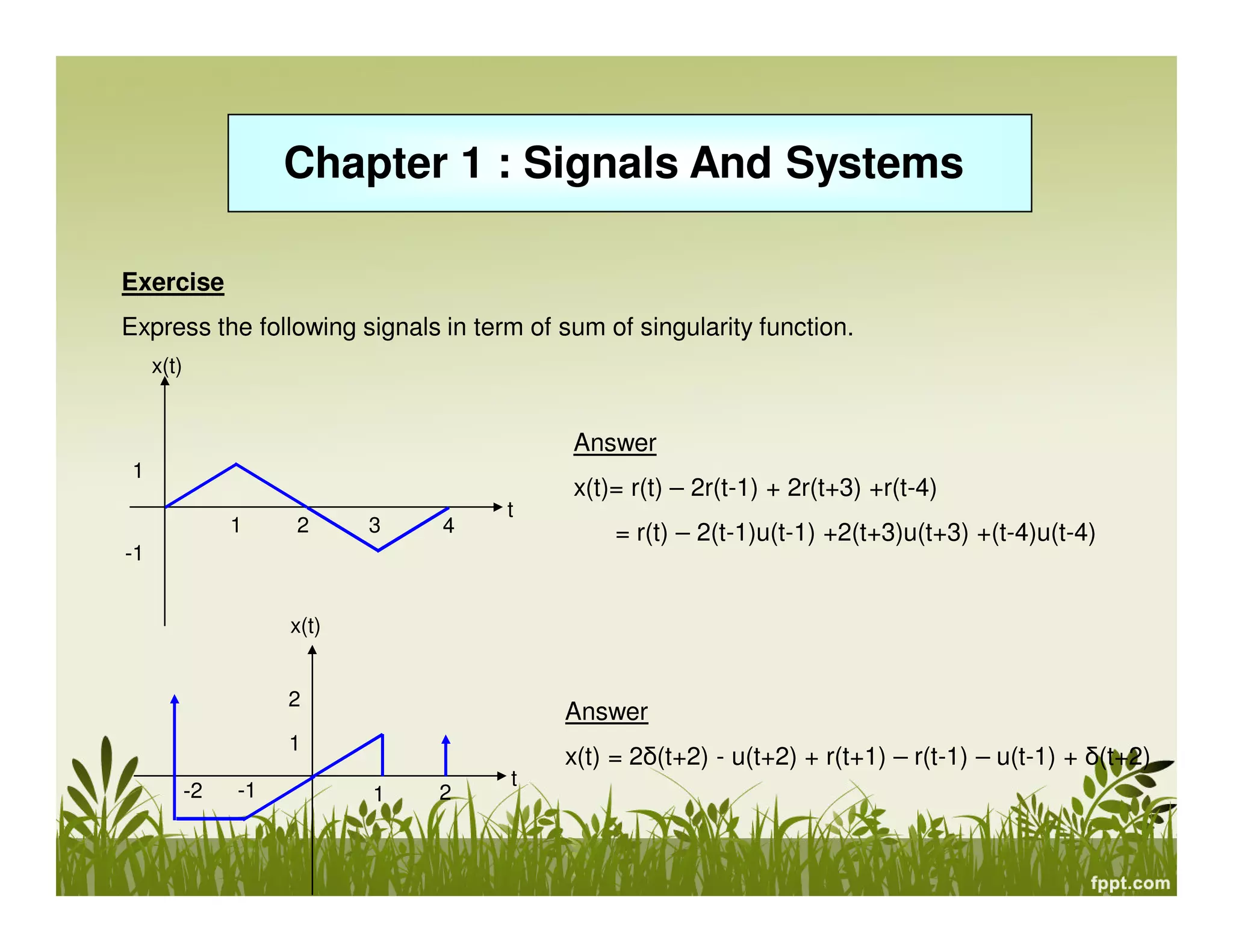
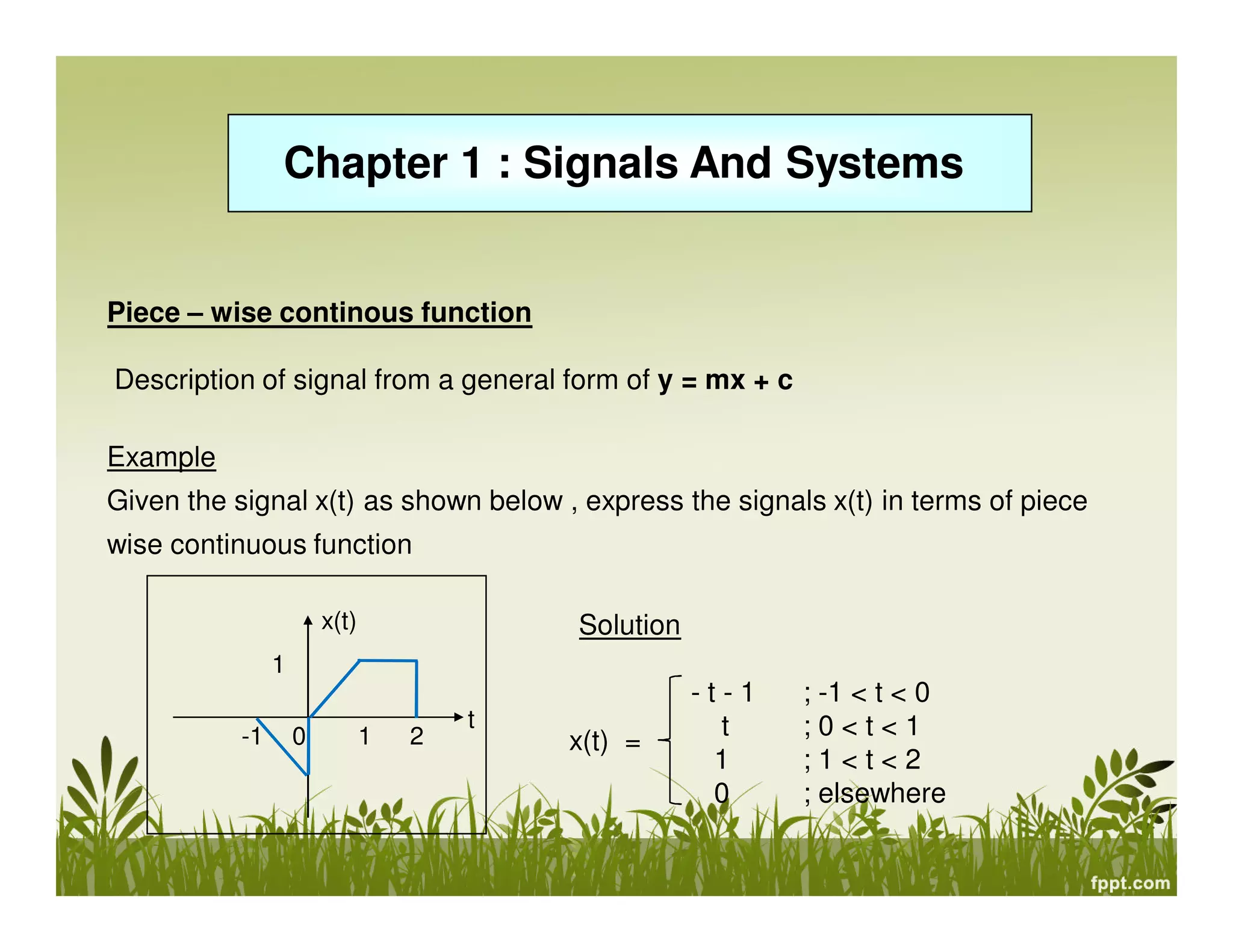
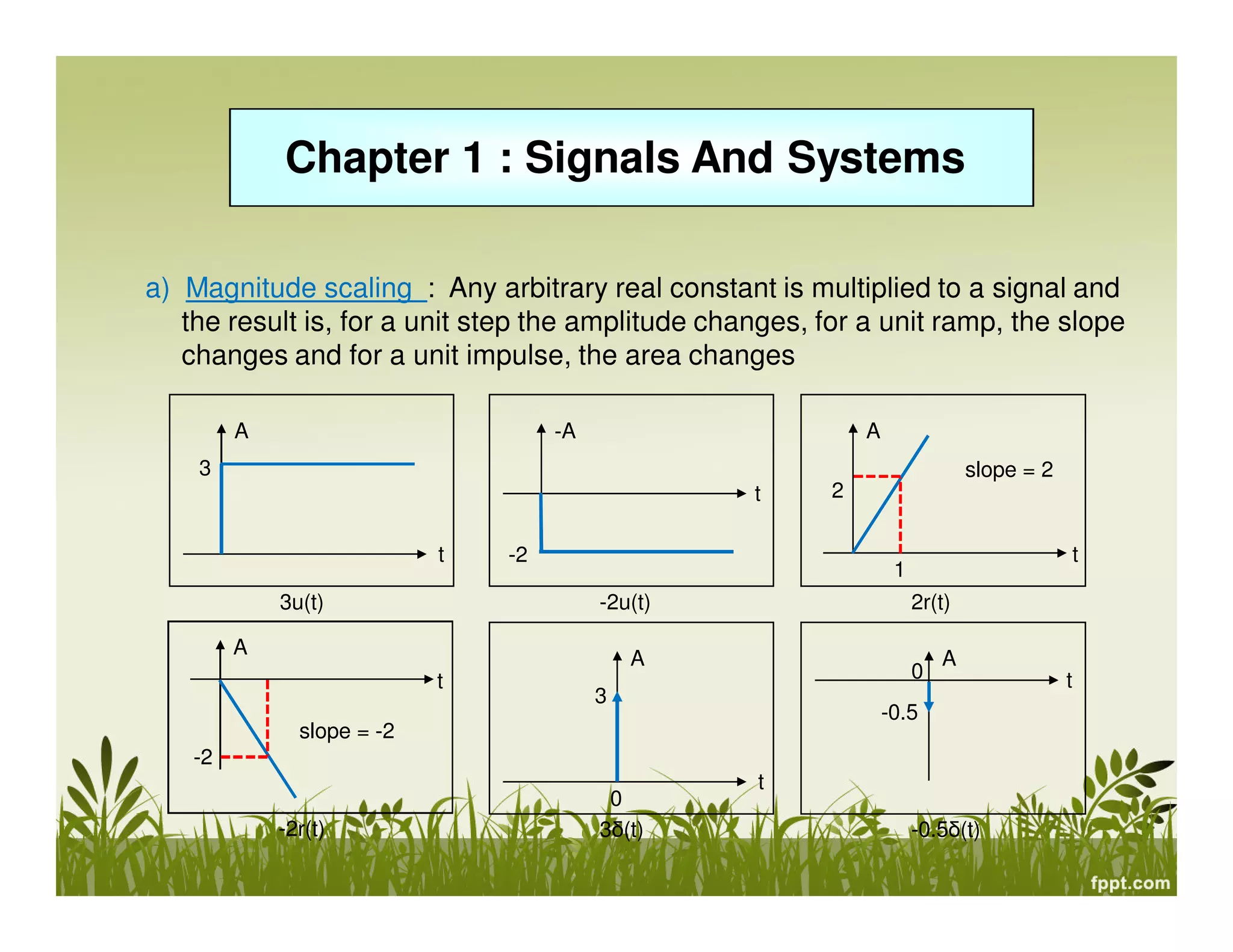
This document provides an overview of signals and systems. It defines key terms like signal, system, continuous and discrete time signals, analog and digital signals, periodic and aperiodic signals. It also discusses different types of signals like deterministic and probabilistic signals, energy and power signals. The document then classifies systems as linear/nonlinear, time-invariant/variant, causal/non-causal, and with/without memory. It provides examples of different signals and properties of signals like magnitude scaling, time shifting, reflection and scaling. Overall, the document introduces fundamental concepts in signals and systems.

































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)


![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)







