
Recommended
More Related Content
Similar to Root Locus Method - Control System - Bsc Engineering
Similar to Root Locus Method - Control System - Bsc Engineering (20)
Recently uploaded
Recently uploaded (20)
Root Locus Method - Control System - Bsc Engineering
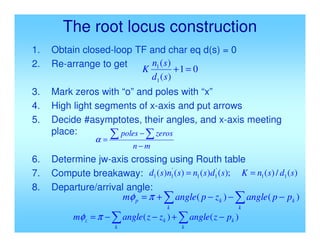
- 1. The root locus construction 1. Obtain closed-loop TF and char eq d(s) = 0 2. Re-arrange to get 3. Mark zeros with “o” and poles with “x” 4. High light segments of x-axis and put arrows 5. Decide #asymptotes, their angles, and x-axis meeting place: 6. Determine jw-axis crossing using Routh table 7. Compute breakaway: 8. Departure/arrival angle: 0 1 ) ( ) ( 1 1 = + s d s n K m n zeros poles − − = α ) ( / ) ( ); ( ) ( ) ( ) ( 1 1 ' 1 1 ' 1 1 s d s n K s d s n s n s d = = − − − + = k k k k p p p angle z p angle m ) ( ) ( π φ − + − − = k k k k z p z angle z z angle m ) ( ) ( π φ
- 2. General controller design G(s) C(s) + - r(s) e y(s) plant controller Goal: for a given plant G(s) a set of desired step response specifications design a controller C(s) such that the closed-loop step response meets the desired specs
- 3. RL based controller parameter selection • Controller form is given • A single parameter needs to be determined – Draw root locus – Select dominant poles in the desired region • Two parameter needs to be determined – Use required specification to reduce degree of freedoms to one – Draw root locus – Select dominant pole in desired region
- 4. Effects of additional pole • One additional R.L. branch shoots out • It increases # asymp. by one – More asymptotes go towards +Re-axis – More likely to be unstable • Poles tend to push R.L. away from them Don’t introduce poles unless required by other concerns
- 6. Effects of additional zero • It sinks one branch of R.L. • It reduces the # asymp. by one – Asymptotes move more towards –Re-axis – More likely to be stable • Zeros attract R.L. – Each zero attracts one branch – If > 1 branches nearby, they go to Re-axis & split, the one branch goes to zero – Never have >= 2 branches go to a zero
- 7. Examples:
- 8. • The dominant pole pair are more negative • But there is one pole (real) close to s = 0, which will settle very slowly (sluggish settling) If we put that additional zero near (0,0):
- 9. Controller design by R.L. Typical setup: C(s) G(s) ( ) ( ) ( ) ( ) 0 1 1 1 = + ⋅ − − s d s n p s z s K L L ( ) ( ) ( ) s d s n s G = ( )( ) ( )( )L L 2 1 2 1 ) ( p s p s z s z s K s C − − − − = Controller Design Goal: 1. Select poles and zero of C(s) so that R.L. pass through desired region 2. Select K corresponding to a good choice of dominant pole pair
- 10. Matlab program template % enter plant transfer function Gp(s) nump = …. ; denp=…. ; % enter desired closed loop step response specification: % you may allow both uppper and lower limits … … % convert from specs to zeta, omegan, sigma, omegad … … %Draw root locus; may need to re-arrange equation based on steady state ess requirements … %adjust window size, x-limit, y-limit, etc using values of omegan, sigma, omegad … % hold the graph, and plot allowable region for pole location on RL graph … … % Computer controller transfer function %if PD or lead needed, design a PD or lead … %if PI or lag needed, design a PI or lag … %design P, or final decision on overall gain … % get controller TF … % obtain closed loop transfer function from Gp(s) and C(s) … … numcl=…; dencl=…; … … % obtain closed-loop step response … … % compute actual step response specs, using your program from before … … % are they good? % compute the actual closed-loop poles, place “x” at those locations … … % are they in the allowable region?
- 11. Proportional control design 1. Draw R.L. for given plant 2. Draw desired region for poles from specs 3. Pick a point on R.L. and in desired region • Use ginput to get point and convert to complex # 4. Compute K using abs and polyval 5. Obtain closed-loop TF 6. Obtain step response and compute specs 7. Decide if modification is needed ( ) ( ) 0 1= + s d s n K ( ) ( ) D P G s G K 1 1 = − =
- 12. When to use: If R.L. of G(s) goes through the desired region for c.l. poles What is that region: – From design specs, get desired Mp, ts, tr, etc. – Use formulae for 2nd order system to get desired ωn , ζ, σ, ωd – Identify / plot these in s-plane
- 13. Example: When C(s) = 1, things are okay But we want initial response speed as fast as possible; yet we can only tolerate 10% overshoot. Sol: From the above, we need that means: ( ) 6 1 + s s % 10 ≤ p M 6 . 0 ≥ ζ C(s)
- 21. This is a cone around –Re axis with ±60° area We also want tr to be as small as possible. i.e. : want ωn as large as possible i.e. : want pd to be as far away from s = 0 as possible 1. Enter plant, Draw R.L., draw max Mp cone 2. Since RL pass through desired cone, Pick pd on R.L., in cone, with max | pd | 3. ( ) 25 6 1 = + ⋅ = = d d d p p p G K
- 22. Root Locus Real Axis Imaginary Axis -7 -6 -5 -4 -3 -2 -1 0 1 -5 -4 -3 -2 -1 0 1 2 3 4 5 System: sys Gain: 24.9 Pole: -3 - 3.99i Damping: 0.601 Overshoot (%): 9.43 Frequency (rad/sec): 4.99 n=1; d=[1 6 0]; sys_p = tf(n,d); rlocus(sys_p); [x,y]=ginput(1); pd=x+j*y; Gpd = evalfr(sys_p, pd); K=1/abs(Gpd); K=25
- 23. 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 0 0.2 0.4 0.6 0.8 1 1.2 1.4 System: sys Time (sec): 0.79 Amplitude: 1.09 Step Response Time (sec) Amplitude sys_cl = feedback(K*sys_p,1); mystep(sys_cl);
- 24. Example: Want: , as fast as possible Sol: 1. Draw R.L. for 2. Draw cone ±45° about –Re axis 3. Pick pd as the crossing point of the ζ= 0.7 line & R.L. 4. ( ) ( )( ) 6 2 10 + + = s s s s G % 5 ≤ p M ( ) 1 2 6 10 0.94 P d d d d K p p p G p = = ⋅ + ⋅ + ≈ 7 . 0 % 5 ≥ ≤ ζ p M ( ) 6 ) 2 ( 10 + + s s s C(s) pd=-0.9+j0.9
- 25. -25 -20 -15 -10 -5 0 5 10 -20 -15 -10 -5 0 5 10 15 20 Root Locus Real Axis Im a g in a r y A x is
- 26. 0 1 2 3 4 5 6 7 8 0 0.2 0.4 0.6 0.8 1 Step Response Time (sec) Amplitude Overshoot is a little too much. Re-choose pd =-0.8+j0.8
- 28. -6 -5 -4 -3 -2 -1 0 1 -5 0 5 0.12 0.24 0.38 0.5 0.64 0.76 0.88 0.97 0.12 0.24 0.38 0.5 0.64 0.76 0.88 0.97 1 2 3 4 5 6 Root Locus RealAxis I m a g i n a r y A x i s
- 29. ylim([0,yss*(1+Mp)]) 0 1 2 3 4 5 6 7 0 0.2 0.4 0.6 0.8 1 Step Response Time (sec) Amplitude
- 30. Controller tuning: 1. First design typically may not work 2. Identify trends of specs changes as K is increased. e.g.: as KP , pole 3. Perform closed-loop step response 4. Adjust K to improve specs e.g. If MP too much, the 2. says reduce KP ↑ ↓ ∴ ↑ ↓ ∴ P d M & , , ζ ω σ
- 31. PD controller design • • This is introducing an additional zero to the R.L. for G(s) • Use this if the dominant pole pair branches of G(s) do not pass through the desired region • Place additional zero to “bend” the RL into the desired region ( ) ( ) z s K s K K s C D D P + = + = D P K K z =
- 33. Design steps: 1. From specs, draw desired region for pole. Pick from region, not on RL 2. Compute 3. Select 4. Select: d d j p ω σ + − = ( ) d p G ∠ ( ) ( ) d d p G z p z ∠ − = + ∠ π s.t. ( ) ( ) d d p G z ∠ − + = π ω σ tan i.e. ( ) ⋅ = ⋅ + = D P d d D K z K p G z p K 1 Gpd=evalfr(sys_p,pd) phi=pi - angle(Gpd) z=abs(real(pd))+abs(imag(pd)/tan(phi)) Kd=1/abs(pd+z)/abs(Gpd) Use [x, y] = ginput(1); pd = x+j*y;
- 36. Example: Want: Sol: (pd not on R.L.) (Need a zero to attract R.L. to pd) % 2 sec 2 %, 5 for t M s p ≤ ≤ 7 . 0 % 5 ≥ ≤ ζ p M 2 4 sec 2 ≥ = ≤ s s t t σ 2 2 Choose j pd + − = ( ) 707 . 0 , 2 , 2 = = = ζ ω σ d ) 2 ( 1 + s s C(s)
- 41. 2. 3. 4. ( ) 4 tan π ω σ d z + = ( ) ( )( ) 2 2 2 2 2 1 + + − + − ∠ = ∠ j j d p G ( ) 2 2 2 j j ∠ − + − −∠ = 4 3 4 5 2 4 3 π π π π = − = − − = 4 1 2 2 = + = ( )( ) = ⋅ = = + + − ⋅ + − + + − = − 8 2 2 2 2 2 2 4 2 2 1 1 D P D K z K j j j K ( ) s s C 2 8+ = ( ) 4 4 3 π π π π = − = ∠ − d p G
- 42. 0 0.5 1 1.5 2 2.5 3 0 0.2 0.4 0.6 0.8 1 Step Response Time (sec) Amplitude ts is OK But Mp too large To redesign: Reduce ωd pd=-2+j1.5
- 43. Gpd = evalfr(sys_p, pd) Gpd = - 0.1600 + 0.2133i phi = pi - angle(Gpd) phi = 0.9273 z = abs(real(pd)) + abs(imag(pd)/tan( phi)) z = 3.1250 Kd = 1/abs(pd+z)/abs(Gpd) Kd = 2 Kp = z*Kd Kp = 6.2500 sys_c=tf([Kd Kp], 1); sys_cl=feedback(sys_c*sys_p, 1) Transfer function: 2 s + 6.25 ---------------- s^2 + 4 s + 6.25 step(sys_cl); ylim([0 yss*(1+2*Mp)])
- 44. 0 0.5 1 1.5 2 2.5 3 0 0.2 0.4 0.6 0.8 1 Step Response Time (sec) Amplitude
- 45. Drawbacks of PD • Not proper : deg of num > deg of den • High frequency gain → ∞: • High gain for noise since noise is HF Saturates circuits Cannot be implemented physically as P D K K jω ω + → ∞ → ∞ Q ∴
- 46. Lead Controller • Approximation to PD • Same usefulness as PD • • It contributes a lead angle: ( ) 0 > > + + = z p p s z s K s C ( ) ( ) z p p C d d + ∠ = ∠ φ = ( ) p pd + ∠ −
- 47. Lead Design: 1. Enter G, Draw R.L. for G 2. Enter specs, draw region for desired c.l. poles 3. Select pd from region 4. Let Pick –z somewhere below pd on –Re axis Let Select ( ) d d j p ω σ + − = ( ) d p G ∠ − = π φ ( ) φ φ φ φ − = + ∠ = 1 2 1 , z pd ( ) 2 s.t. φ = + ∠ p p p d ( ) 2 tan i.e. φ ω σ d p + = C(s) G(s)
- 48. • There are many choices of z, p • More neg. (–z) & (–p) → more close to PD & more sensitive to noise, and worse steady-state error • But if –z is > Re(pd), pd may not dominate ( ) ( ) d d d d p d p z d p p G z p p p p G K ⋅ + + = ⋅ = + + 1 Let ( ) p s z s K s C + + = : is controller Your
- 49. Example: Lead Design MP is fine, but too slow. Want: Don’t increase MP but double the resp. speed Sol: Original system: C(s) = 1 Since MP is a function of ζ, speed is proportional to ωn 5 . 0 2 2 , 2 = = = ζ ζω ω n n 4 2 2 4 TF c.l. + + = s s C(s) ) 2 ( 4 + s s
- 51. Draw R.L. & desired region Pick pd right at the vertex: (Could pick pd a little inside the region to allow “flex”) 5 . 0 new want we Hence ≥ ζ 4 new ≥ n ω 3 2 2 j pd + − =
- 53. Clearly, R.L. does not pass through pd, nor the desired region. need PD or Lead to “bend” the R.L. into region. (Note our choice may be the easiest to achieve) Let’s do Lead: ( ) ( ) 2 + ∠ + ∠ + = − = d d d p p p G π π φ ∴ 6 2 3 2 π π π π = + + =
- 54. Pick –z to the left of pd 4 , 4 Pick = − = − z z ( ) 3 4 1 π φ = + ∠ = d p 6 6 3 then 1 2 π π π φ φ φ = − = − = ( ) 2 tan then φ ω σ d p + = 8 3 2 2 3 1 = + = ( ) 7 2 4 1 ≈ = + ⋅ + + d p d p p d p z d p K ( ) 8 4 7 + + = ∴ s s s C
- 55. 0 0.5 1 1.5 2 2.5 3 0 0.2 0.4 0.6 0.8 1 1.2 Step Response Time (sec) Amplitude Speed is doubled, but over shoot is too much.
- 56. 0 0.5 1 1.5 2 2.5 3 0 0.2 0.4 0.6 0.8 1 1.2 Step Response Time (sec) Amplitude ( ) 8 4 7 + + = s s s C ( ) 10 4 6 + + = s s s C Change controller from to To reduce the gain a bit, and make it a little closer to PD
- 57. Particular choice of z : ( ) ( ) ( ) 2 2 2 1 φ φ φ + ∠ = + ∠ = − ∠ = − ∠ = + ∠ = d d d d d p A Bp A p z p z O z p ( )= + ∠ = p pd 2 φ ( ) ∞ + ∠ = ∠ O p O Ap d d d p ∠ = O Ap Bp d d ∠ bisect s.t. B Choose A Bp OBp d d ∠ = ∠ ∴ O Apd ∠ = 2 1 d p ∠ = 2 1 2 2 φ − ∠ = d p
- 58. ( ) 1 tan φ ω σ d z + = ( ) 2 tan φ ω σ d p + = 3 2 2 : example prev. In j pd + − = 3 2 , 2 = = d ω σ get we procedure, above Follow ( ) 46 . 5 93 . 2 73 . 4 + + = s s s C 359 . 0 , % 21 : step c.l. = = r p t M repeat. , 5 . 2 to 2 change = σ 375 . 0 , % 1 . 16 : step c.l. = = r p t M