Downloaded 43 times


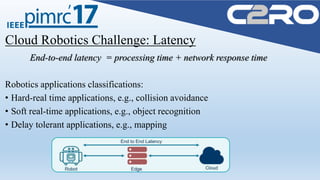
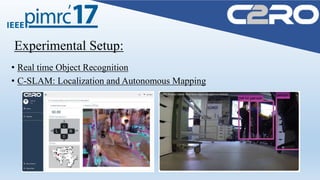

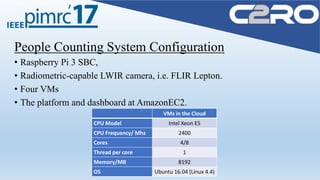




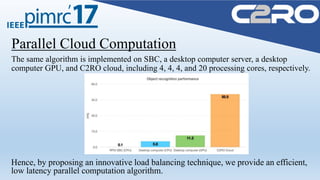

This document discusses real-time cloud robotics and its applications in smart cities. It introduces the C2RO cloud robotics platform, which uses stream processing to connect low-cost robotic devices virtually and process data. The document addresses the challenge of latency in cloud robotics and proposes a hybrid cloud/edge computing model to distribute processing. It provides examples of using C2RO for object recognition and SLAM. The document also describes a people counting project in collaboration with Philips and MIT using C2RO to process data from smart street lights.