From Event to Action: Accelerate Your Decision Making with Real-Time Automation
Theme 78
1. SECTION 1. AERODYNAMICS OF LIFTING SURFACES
THEME 7. AERODYNAMICS OF THE WING HIGH-LIFT DEVICES
Swept wings of rather small area with an airfoil of rather small camber and
relative thickness are applied in modern aircraft with the purpose of flight speed
increasing. Such wings can not provide large lift on landing modes because of early
flow stall. The problem of increasing lifting properties for modern wings at high angles
of attack for shortening of take-off and landing distance is very actual now. For this
purpose wings are equipped with special design elements which allow to increase the
value of C ya max in the area of critical angles of attack α st . These elements working on
modes of takeoff, landing and maneuver are called wing high-lift devices.
The set of effective high-lift devices applied in aircraft is wide enough (table 7.1).
There distinguish rigid, jet, combination high-lift devices and high-lift devices based on
the boundary layer control (BLC).
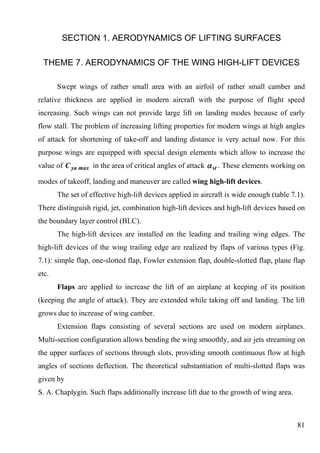
The high-lift devices are installed on the leading and trailing wing edges. The
high-lift devices of the wing trailing edge are realized by flaps of various types (Fig.
7.1): simple flap, one-slotted flap, Fowler extension flap, double-slotted flap, plane flap
etc.
Flaps are applied to increase the lift of an airplane at keeping of its position
(keeping the angle of attack). They are extended while taking off and landing. The lift
grows due to increase of wing camber.
Extension flaps consisting of several sections are used on modern airplanes.
Multi-section configuration allows bending the wing smoothly, and air jets streaming on
the upper surfaces of sections through slots, providing smooth continuous flow at high
angles of sections deflection. The theoretical substantiation of multi-slotted flaps was
given by
S. A. Chaplygin. Such flaps additionally increase lift due to the growth of wing area.
81
2. Fig. 7.1. High-lift devices of the wing trailing edge:
a) - flap ΔC yа h − l .dev . = 0 .7 δ flap = 30 o ; b) - one-slotted flap;
c) - one-slotted extended flap ΔC yа h− l .dev . = 1.1 ;
d) - double-slotted flap ΔC yа h − l .dev . = 1.4 ; e) - Fowler flap;
f) - plane flap ΔC yа h− l .dev . = 0 .8 ÷ 0 .9 δ flap = 60 o .
An angle between chords of main flap section in deflected and non-deflected
positions is called flap setting δ flap . It is measured in a plane, perpendicular to axis of
rotation; δ flap > 0 if flap is deflected downwards.
The flap are used not only for improvement of take-off and landing
characteristics, but also for direct control of lift, rational redistribution of loading which
effects a wing, and also for drag reduction.
The high-lift devices of the wing leading edge are usually made as the deflected
slats (Fig. 7.2): movable slat, Krueger slat, deflecting nose etc.
The slats are intended for prevention of premature flow stalling from wing. It is
reached due to wing camber at the leading edge and jet blowing onto the upper wing
surface through a slot.
An angle characterizing turn of coordinate system related with the slat at its
deflection is called slat setting δ slat .
The slat is the wing-shaped and locates along the wing leading edge. At
increasing of angle α under the influence of sucking force the slat is put forward into
operative location.
82
3. Fig. 7.2. High-lift devices of the wing leading edge:
a) - sliding slat; b) - extended slat ΔC yа h − l .dev . = 0 .6 ÷ 0 .9 ;
c) - deflected nose ΔC yа h− l .dev . = 0 .55 ÷ 0 .75 δ з = 60 o .
Choice of high-lift devices in each particular case is determined by such criteria,
as increment of the lift coefficient ΔC yа h− l .dev . provided with it (Fig. 7.3, 7.4) and
inevitable drag increment. The high-lift devices type allowing to receive the required
take-off and landing characteristics of the airplane should be got out right at the
beginning of the designing process.
Fig. 7.3. Influence of deflection of split flap, Fig. 7.4. Influence of slat deflection
flap and slotted wing onto C ya = f ( α ) onto C ya = f ( α )
The major factor causing an increasing of a wing C ya factor at deflection of high-
lift devices is the growing of its cross-sections concavity. The growth of C ya is also
promoted by increase of the wing area at using movable flaps.
83
4. Let's consider the influence of high-lift
devices deflection of the trailing edge onto
structure of flow about the wing. Comparison
of pressure factor C p distributions chordwise
at non-deflected and extended flaps (fig. 7.5)
shows, that the flap deflection causes an
essential growth of rarefaction along total
upper wing surface, and not just on its
deflected part. The appreciable increase of
overpressure is observed along the total lower
surface. As a result the lift coefficient
Fig. 7.5. Pressure factor distribution
increases.
along airfoil outline with flap and
For effective realization of factor C ya
without it
increasing it is necessary to provide attached
flow about wing with the extended high-lift devices. As it's known, this is promoted by
boundary layer control (BLC) by increasing of kinetic energy of decelerated air layer
(blown off) or its removal from the flow (suction) (Fig. 7.6). The change of dependence
of lift coefficient is similar to slat application (Fig. 7.4). The control system of
circulation ΔC yа h − l .dev . = 0 .6 ÷ 0 .8 at C μ = 0 .3 , systems with flow blowing-off from
slot on a wing tail part (Fig. 7.7) and system of blower of wing surface by jets from the
engine (Fig. 7.8) are also examples of jet high-lift devices. The intensity of blower
(blowing-off) is characterized by a factor of momentum:
kg ⋅ m
msV j s s ,
Cμ = (7.1)
q∞ S j N 2
2 ⋅m
m
where m s is the air consumption per second, V j is the jet speed, S j is the wing area
maintained by high-lift devices, q∞ is the dynamic pressure.
84
5. Fig. 7.6. Systems for boundary layer control ΔC yа h − l .dev . = 0 .6 ÷ 0 .8 :
a) - suction through a slot, b) - distributed suction through the porous or
punched surface, c) - blow-off from a slot.
Fig. 7.7. Systems with flow blow-off from a slot on wing tail part:
a) - flap with blowing of the upper surface ΔC yа h− l .dev . = 7 ÷ 8 , C μ ≈ 2 ;
b) - jet flap ΔC yа h− l .dev . = 4 ÷ 5 ; c) - ejector flap ΔC yа h− l .dev . = 6 ÷ 7 , C μ ≈ 2 .
Fig. 7.8. A system of wing surface blowing by engine jets:
à) - blowing of the flap upper surface δ flap = π 3 , C μ ≈ 2 , ΔC yа h− l .dev . ≈ 8 ;
b) flap lower surface δ flap = 40 o 60 o , ΔC yа h− l .dev . = 6 ...7 .
The spoilers are panels installed on the wing which can be deflected outside to
spoil the flow over the wing. They are made as rotary or extended (fig. 7.9) and
installed both on the upper and on the lower wing surfaces. Spoiler either turbulizes or
stalls the flow depending on altitude of its moving out. The pressure redistributes both
on the upper and on the lower surfaces.
85
6. Fig. 7.9. Spoilers: a) - rotary; b) - extended.
Spoilers are used for roll control (instead of ailerons).
Spoilers are also applied for shortening of run at landing and aborted takeoff. In
such case they are mounted on the wing upper surface directly ahead of flaps and
deflected simultaneously on both wings. It causes flow stalling from the wing upper
surface and high-lift devices. As a result, the lift coefficient C yа abruptly decreases and
the drag coefficient C xа grows, loading onto wheels also grows, that allows to increase
braking force considerably. Such spoilers are called ground spoilers. For landing angles
of attack ΔC yа h− l .dev . = −0 .7 ...0 .75 .
Generally, a type and span of high-lift devices, wing plan form, panel flap chord
b flap , flap chord b flap , type of wing airfoil and its relative thickness с , etc. influence
ΔC yа h− l .dev . value.
For swept wings the effectiveness of high-lift devices is abruptly reduced at
angles close to α st . Similar effect is caused by aspect ratio decreasing.
86
7. The table 7.1. High-lift devices.
Increase of Angle of
High-lift devices maximum lift basic airfoil at Remarks
max. lilt
Effects of all high-lift devices
depend on shape of basic airfoil.
- 15 °
Basic airfoil
Increase camber. Much drag when
fully lowered. Nose-down pitching
50 % 12 °
Plain or camber moment.
flap
Increase camber. Even more drag
than plain flap. Nose-down pitching
60 % 14 °
moment.
Split flap
Increase camber and wing area.
Much drag. Nose-down pitching
90 % 13 °
moment.
Zap flap
Control of boundary layer. Increase
camber. Stalling delayed. Not so
65 % 16 °
much drag.
Slotted flap
Same as single-slotted flap only
more so. Treble slots sometimes
70 % 18 °
used.
Double-slotted flap
Increase camber and wing area. Best
flaps for lift. Complicated
90 % 15 °
mechanism. Nose-down pitching
Fowler flap moment.
Same as Fowler flap only more so.
Treble slots sometimes used.
100 % 20 °
Double-slotted
Fowler flap
Nose-flap hinging about leading
edge. Reduces lift at small
50 % 25 °
deflections. Nose-up pitching
Krueger slat moment.
87
8. Table 7.1. High-lift devices.
Increase of Angle of
High-lift devices maximum lift basic airfoil at Remarks
max. lilt
Controls boundary layer. Slight
extra drag at high speeds.
40 % 20 °
Slotted wing
Controls boundary layer. Extra drag
at high speeds. Nose-up pitching
50 % 20 °
moment.
Fixed slat
Controls boundary layer. Increases
camber and area. Greater angles of
60 % 22 °
attack. Nose-up pitching moment.
Movable slat
More control of boundary layer.
Increased camber and area. Pitching
75 % 25 °
moment can be neutralized.
Slat and slotted
fl Complicated mechanisms. The best
combination for lift; treble slots may
120 % 28 °
Slat and double- be used. Pitching moment can be
slotted Fowler flap neutralized.
Effect depends very much on details
of arrangement.
80 % 16 °
Blown flap
Depends even more on angle and
velocity of jet.
60 % ?
Jet flap
Note. Since the effects of these devices depend upon the shape of the basic
airfoil, and the exact design of the devices themselves, the values given can only be
considered as approximations. To simplify the diagram the airfoils and the flaps have
been set at small angles, and not at the angles giving maximum lift.
88
9. THEME 8. WING PROFILE DRAG
The profile drag is the sum of surface- friction drag and drag of pressure caused
by pressure redistribution along the streamlined surface due to viscosity influence
(sometimes latter item is called form drag).
It is necessary to mean that surface-friction drag is the main part of profile drag of
streamlined bodies (therefore it is often considered that C xp ≈ C x fr ). This circumstance
is taken into account in approximate methods of C xp calculation. It is possible to adopt,
that C xp does not depend on angles of attack in modes of attached flow and then
calculation of C xp is performed at α = 0 (small change of C xp on angles of attack is
taken into account at definition of induced drag, having put an effective aspect ratio
λ eff , or separate items at polar calculating). In range of Mach numbers less than 4 ...5
all drag components (wave, induced, profile) can be determined separately from each
other. At that the wave and induced drag are well calculated without the account of
viscosity. However at M∞ ≥ 4 ...5 (zone of hypersonic speeds) there are effects of
viscous interaction, which cause the necessity of the account of viscosity and pressure
mutual influence, that makes wave and profile drag inter-related.
Below we shall consider the method of calculation for streamlined bodies at
M∞ ≤ 4 ...5 (without the account of viscous interaction).
The most widespread engineering method of C xp calculation is method CAGI.
According to this method the profile drag is determined as surface-friction drag of a flat
plate with introduction of correction multipliers which are taking into account an
additional part of drag from pressure forces. According to CAGI method the wing
profile drag is determined by the formula
C xp = 2С f η c η м (8.1)
where С f is the drag coefficient of friction of one side of a flat plate in a flow of
incompressible fluid at identical to wing: Reynolds number Re and position of a point
of laminar boundary layer transition into turbulent x t ; the factor double value takes into
89
10. account flow about the upper and lower surfaces; η м is the multiplier which is taking
into account a compressibility (Mach number M ∞ ); η c is the factor taking into
account contribution of pressure forces into profile drag.
Generally С f , η c and η м are also the function of x t , Re , с , M i.e.
V∞ l
С f = f ( Re, x t ) ; ηc = f (c , x t ) ; η м = f ( M , x t ) . At that Re = , where length
ν∞
of a mean aerodynamic chord bA is used as characteristic length l . It is convenient to
write Reynolds number as a function dependent on Mach number and flight altitude
Re = Vb A ν = M b A f ( H ) , (8.2)
where f ( H ) = a∞ ν∞ , a∞ is the speed of a sound and ν∞ is the kinematic factor of
viscosity are determined under the tables of standard atmosphere depending on flight
altitude. Or
f ( H ) = 2 .33⎛ 1 − H + H
⎜
⎝ 12
2 ⎞ ⋅ 107 , m − 1
⎟
535⎠ [ ] (8.3)
The most complex and insufficiently investigated is the definition of position of
transition point x T . From the standpoint of drag decreasing it is desirable to have the
body (wing) streamlined completely by laminar flow (i.e. x t = 1 ). Only profile C xp and
induced C xi drags exist in subsonic flow. Polar formula is written as
2
C xa = C x 0 + AC ya , where C x0 = C xp . The parameter K max is determined as
1
K max = and at this mode C xa = 2C x 0 = 2C xp , i.e. the profile drag is a half of
2 AC x 0
full drag). However it practically can not be achieved. Any irregularities, rivets, welded
seams etc. are a source of turbulence. As a rule, at a preliminary designing stage the
precise value of x t is not known. Usually one assumes that the body (wing) is
streamlined completely by turbulent flow ( x t = 0 ), that overestimates full drag and
required thrust of the power plant. At actual value ( x t > 0 ) the excess of a thrust
(power) is received which can go onto increasing of maneuverable properties of the
90
11. airplane. Nevertheless, it is necessary to note deep researches, which are being
performed on decreasing of C xp . In case of x т = 0 it is possible to assume the
following computational formulae for C xp definition:
0 ,087 2 1 + 5c 2 M
Cf = ; ηc = 1 + 2c + 9 c ; η м = . (8.4)
( lg Re − 1,6 ) 2 1 + 0 .2 M 2
If the value x t ≠ 0 is known, then it is necessary to address to the diagrams. It is
also possible to use approximate formulae (at x t ≤ 0 .5 ):
0 ,087
Cf = (1 − x t ) + 1,Re
33
xt ;
( lg Re − 1,6 ) 2
ηc = 1 + 2ce − 2 ,4 x t + 9 c 2 e − 4 x t ; (8.5)
⎛ ⎞
⎜
ηм = ⎜
1
⎜ 1 + 0 ,2 M 2
2 ⎟
(
+ 0 ,055 x t M ⎟ 1 + 5 c 2 M .
⎟
)
⎝ ⎠
If there are various sources of turbulence on a streamlined surface (design
superstructures, joints of skin sheets, riveted and welded seams, slot of high-lift devices
of the wing leading edge etc.), then it is necessary to locate the point of transition in a
place of source presence.
91