Automatic Skinning of the Simulated Manipulator Robot ARM
Showcase2016_POSTER_MATH_Mar2016
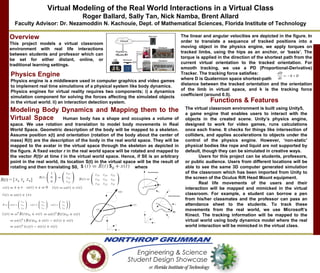
1. The linear and angular velocities are depicted in the figure. In
order to translate a sequence of tracked positions into a
moving object in the physics engine, we apply torques on
tracked limbs, using the hips as an anchor, or ‘basis’. The
torque is applied in the direction of the shortest path from the
current virtual orientation to the tracked orientation. For
smooth tracking, we use a PD (Proportional-Derivative)
Tracker. The tracking force satisfies:
where D is Quaternion space shortest-path
distance between the tracked orientation and the orientation
of the limb in virtual space, and k is the tracking force
coefficient (around 0.5).
Modeling Body Dynamics and Mapping them to the
Virtual Space Human body has a shape and occupies a volume of
space. We use rotation and translation to model body movements in Real
World Space. Geometric description of the body will be mapped to a skeleton.
Assume position x(t) and orientation (rotation of the body about the center of
mass) R(t) are the description of the body in the real world space. They will be
mapped to the avatar in the virtual space through the skeleton as depicted in
the figure. A fixed vector r in the real world space will be rotated and mapped to
the vector R(t)r at time t in the virtual world space. Hence, if S0 is an arbitrary
point in the real world, its location S(t) in the virtual space will be the result of
rotating and then translating S0, where
Virtual Modeling of the Real World Interactions in a Virtual Class
Roger Ballard, Sally Tan, Nick Namba, Brent Allard
Faculty Advisor: Dr. Nezamoddin N. Kachouie, Dept. of Mathematical Sciences, Florida Institute of Technology
Overview
This project models a virtual classroom
environment with real life interactions
between students and professor which can
be set for either distant, online, or
traditional learning settings.
Functions & Features
Physics Engine
Physics engine is a middleware used in computer graphics and video games
to implement real time simulations of a physical system like body dynamics.
Physics engines for virtual reality requires two components; i) a dynamics
simulation component for solving the forces affecting the simulated objects
in the virtual world. ii) an interaction detection system.
The virtual classroom environment is built using Unity5,
a game engine that enables users to interact with the
objects in the created scene. Unity’s physics engine,
designed to work for video games, runs calculations
once each frame. It checks for things like intersection of
colliders, and applies accelerations to objects under the
control of the physics engine. However, ‘non-static’
physical bodies like rope and liquid are not supported by
default, though they can be simulated in creative ways.
Users for this project can be students, professors,
or public audience. Users from different locations will be
able to see the same 3D computer generated simulation
of the classroom which has been imported from Unity to
the screen of the Oculus Rift Head Mount equipment.
Real life movements of the users and their
interaction will be mapped and mimicked in the virtual
classroom. For example, a student can borrow a pen
from his/her classmates and the professor can pass an
attendance sheet to the students. To track these
movements from the real world, we use Microsoft’s
Kinect. The tracking information will be mapped to the
virtual world using body dynamics model where the real
world interaction will be mimicked in the virtual class.