Đề tài: Mạch vòng tốc độ theo hai tiêu chuẩn module tối ưu, HOT
Hệ thống quản lí năng lượng cho rotary wing uav
1. Mô tả hệ thống quản lí năng lượng (PMS) cho
Rotary-wing UAV
UAV Team
1. Các yêu cầu của hệ thống
- Khối lượng tải (payload): 50 kg
- Thời gian bay (Endurance): chưa biết
- Sử dụng động cơ xăng để cung cấp năng lượng
- Loại UAV: quad-copter (rotary-wing) có ? động cơ (sử dụng động cơ BLDC):
chưa biết dùng động cơ BLDC loại nào ? (số động cơ sử dụng phụ thuộc vào tải)
- Bay được trong điều kiện thời tiết: gió cấp bao nhiêu
- Hệ thống thiết kế trên mạch PCB
2. Sơ đồ khối của hệ thống
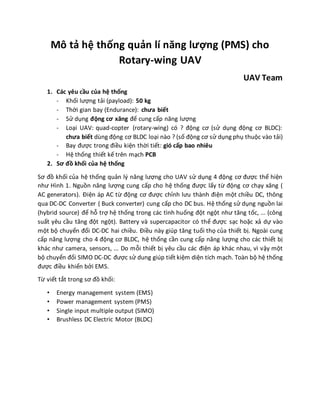
Sơ đồ khối của hệ thống quản lý năng lượng cho UAV sử dụng 4 động cơ được thể hiện
như Hình 1. Nguồn năng lượng cung cấp cho hệ thống được lấy từ động cơ chạy xăng (
AC generators). Điện áp AC từ động cơ được chỉnh lưu thành điện một chiều DC, thông
qua DC-DC Converter ( Buck converter) cung cấp cho DC bus. Hệ thống sử dụng nguồn lai
(hybrid source) để hỗ trợ hệ thống trong các tình huống đột ngột như tăng tốc, ... (công
suất yêu cầu tăng đột ngột). Battery và supercapacitor có thể được sạc hoặc xả dự vào
một bộ chuyển đổi DC-DC hai chiều. Điều này giúp tăng tuổi thọ của thiết bị. Ngoài cung
cấp năng lượng cho 4 động cơ BLDC, hệ thống cần cung cấp năng lượng cho các thiết bị
khác như camera, sensors, ... Do mỗi thiết bị yêu cầu các điện áp khác nhau, vì vậy một
bộ chuyển đổi SIMO DC-DC được sử dung giúp tiết kiệm diện tích mạch. Toàn bộ hệ thống
được điều khiển bởi EMS.
Từ viết tắt trong sơ đồ khối:
• Energy management system (EMS)
• Power management system (PMS)
• Single input multiple output (SIMO)
• Brushless DC Electric Motor (BLDC)
2. AC-DC
CONVERTERS
DC-DC
CONVERTERS
EMS
BIDIRECTIONAL
DC-DC
CONVERTERS
BATTERYS
SUPERCAPACITORS
SIMO DC-DC
CONVERTERS
AC GENERATORS
CAMERA, SENSORS,
MICRO PROCESSOR,
OTHER DEVICES,...
BIDIRECTIONAL
DC-DC
CONVERTERS
DC BUS
DC
BUS
DC BUS
DC
BUS
Hình 1. Sơ đồ khối của hệ thống quản lí năng lượng cho UAV sử dụng 4 động cơ
Đối tượng, phạm vị thiết kế: thiết kế các khối DC-DC converter, bidrectional DC-DC
converter, SIMO DC-DC converter.
Do chỉ tập trung vào thiết kế các bộ chuyển đổi điện áp DC-DC nên các khối còn lại không
cần quá đi chi tiết. Tuy nhiên cần biết khoảng điện áp đầu vào ra, công suất, ... để làm
spec cho thiết kế DC-DC converter.
Cần phải làm rõ các thông tin dưới đây:
1.1 Kịch bản bay (Hoàng + Phú)
- Cần làm rõ công suất yêu cầu đối với các chế độ bay
- Xem xét ảnh hưởng của thời tiết đến UAV => Công suất cản của gió
3. 1.2 Khối AC-GENERATORS (Minh)
- Cần tìm hiểu qua về cấu trúc, làm rõ nhiên liệu đầu vào, điện áp AC ra, công suất ra,
hiệu suất,...
- Tìm hiểu về cơ chế hoặt động của pin, siêu tụ và động cơ đốt. (Động cơ sẽ không
chạy liên tục mà chỉ nạp điện cho pin khi pin còn dưới 50%. Lúc này thì pin sẽ ngưng
cấp ra động cơ sẽ vừa sạc cho pin và cấp nguồn cho UAV hoạt động).
1.3Động cơ BLDC ( Quân + Hải)
- Tìm hiểu xem với UAV có khối lượng khoảng 50 kg (cả tải) thì nên dùng loại động cơ
nào (Ví dụ BLDC 12V. Phân tích về sức nâng, số vòng quay trên phút, khối lượng, công
suất, kích thước, điện áp, giá thành rồi suy ra số động cơ tối thiểu cần dùng).
- Tìm hiểu về khối điều khiển động cơ (inverter, motor drive). Xác định điện áp vào,
điện áp ra, công suất. (tìm đầu vào đầu ra và công suất và không nên đi chi tiết vì theo
anh Quyết bảo khối này sẽ được mua).
1.4 DC-DC converter (Phương + Hoàng)
Survey các bài báo xem họ dùng cấu trúc gì, các vấn đề gặp phải khi thiết kế khối này,
phương pháp control dùng là gì, hiệu suất đạt được là bao nhiêu ?
1.5 SIMO DC-DC converter (Nam + Thịnh)
Survey các bài báo tìm hiểu cấu trúc SIMO basic, các vấn đề gặp phải khi thiết kế khối
này, phương pháp control dùng là gì, hiệu suất đạt được là bao nhiêu ?