サマーセミナー2016: 画像を用いた物体検出・認識に基づくロボット動作の生成
•Download as PPTX, PDF•
0 likes•723 views

日常生活環境でロボットが動作するために必要となる物体検出・認識を実現する画像処理・機械学習に関する知識を学びます。

Recommended
More Related Content
More from 奈良先端大 情報科学研究科
More from 奈良先端大 情報科学研究科 (20)
Recently uploaded
Recently uploaded (7)
サマーセミナー2016: 画像を用いた物体検出・認識に基づくロボット動作の生成
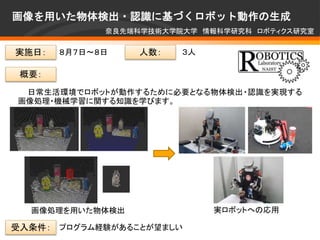
- 1. 画像を用いた物体検出・認識に基づくロボット動作の生成 奈良先端科学技術大学院大学 情報科学研究科 ロボティクス研究室 日常生活環境でロボットが動作するために必要となる物体検出・認識を実現する 画像処理・機械学習に関する知識を学びます。 概要: 実施日: 8月7日〜8日 人数: 3人 受入条件: プログラム経験があることが望ましい 画像処理を用いた物体検出 実ロボットへの応用