
Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (18)
Similar to 6 bar linkage mechanism for hopper tipper hoisting
Similar to 6 bar linkage mechanism for hopper tipper hoisting (20)
Recently uploaded
Recently uploaded (20)
6 bar linkage mechanism for hopper tipper hoisting
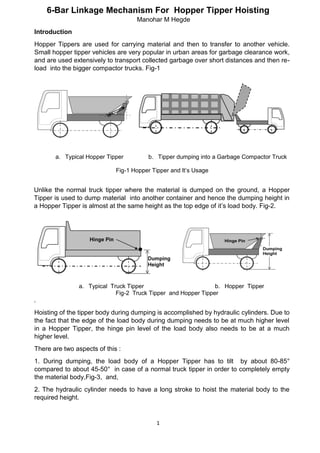
- 1. 1 6-Bar Linkage Mechanism For Hopper Tipper Hoisting Manohar M Hegde Introduction Hopper Tippers are used for carrying material and then to transfer to another vehicle. Small hopper tipper vehicles are very popular in urban areas for garbage clearance work, and are used extensively to transport collected garbage over short distances and then re- load into the bigger compactor trucks. Fig-1 a. Typical Hopper Tipper b. Tipper dumping into a Garbage Compactor Truck Fig-1 Hopper Tipper and It’s Usage Unlike the normal truck tipper where the material is dumped on the ground, a Hopper Tipper is used to dump material into another container and hence the dumping height in a Hopper Tipper is almost at the same height as the top edge of it’s load body. Fig-2. a. Typical Truck Tipper b. Hopper Tipper Fig-2 Truck Tipper and Hopper Tipper . Hoisting of the tipper body during dumping is accomplished by hydraulic cylinders. Due to the fact that the edge of the load body during dumping needs to be at much higher level in a Hopper Tipper, the hinge pin level of the load body also needs to be at a much higher level. There are two aspects of this : 1. During dumping, the load body of a Hopper Tipper has to tilt by about 80-85° compared to about 45-50° in case of a normal truck tipper in order to completely empty the material body,Fig-3, and, 2. The hydraulic cylinder needs to have a long stroke to hoist the material body to the required height.
- 2. 2 a. Typical Truck Tipper Dumping Action b. Hopper Tipper Dumping Action Fig-3 Comparison of Dumping Actions 4-Bar linkage mechanism is the most preferred arrangement to hoist a Hopper Tipper load body, mainly due to it’s simplicity. Hydraulic cylinder acts as a sliding pair. Most commonly used arrangement of linkage in today’s Hopper Tipper is shown in Fig-4 a. 4-Bar Mechanism in Normal Condition b. 4-Bar Mechanism During Dumping Condition Fig-4 Usage of a 4-Bar Mechanism for Hopper Tipper Hoisting Engineers while designing the hoisting system for a Hopper Tipper have to meet multiple objectives. One such objective is to limit the maximum cylinder length within target value. Another objective is to avoid high concentration of forces and stresses. Although a 4-Bar linkage can very well meet the basic functionality of hoisting the load body, and is most commonly used as well, there are situations when design engineers find it inadequate to meet the above mentioned specific design objectives. The configuration of the 4-Bar linkage currently used in most of the Hopper Tippers is not optimised, and results in fairly long cylinder stroke. For example, one popular model of a smallest Hopper Tipper in the
- 3. 3 market has a minimum cylinder length of about 680mm and extended length of about 1030mm. Hence, alternative configurations of hoisting arrangement are desirable for linkage optimisation. In this article, 2 alternative arrangement of 4-Bar linkage are evaluated with respect to two criteria, namely, 1). maximum length of the hydraulic cylinder, and, 2). maximum reaction force on the load body hinge pin. The results are compared with the values obtained on existing 4-Bar arrangement. Further, a 6-Bar mechanism is designed and evaluated, and the results compared with the values obtained on existing and alternative proposals of 4-Bar mechanisms. Existing 4-Bar mechanism and also alternative 4-Bar arrangement are shown in Fig-5 a. Existing b. Alternative-1 c. Alternative-2 Fig-5 Existing and Alternative 4-Bar Mechanisms Problem Statement A very common objective during product design stage is to achieve the most compact equipment size possible. When hydraulic cylinders are used for tipper hoisting, shorter cylinder lengths are preferred. This will result in efficient packaging. This will also improve ease of assembly and ease of maintenance. Tippers are generally used in outdoor atmosphere, and hence are subjected to a lot of wear and tear. The pin joints used in a tipper mechanism are prone to rapid wear which leads to quicker failures of these joints. The maximum load on the pin and the amount of rotation are the major factors affecting the rate of wear. In a typical tipper hoisting mechanism, several pins are used (body hinge pin, cylinder anchor pins,etc) but the body hinge pin is the one which goes through the maximum rotation( 80-85° in case of Hopper Tippers). Hence, design engineers have to look for ways of keeping the static loads on the rotating pins, especially the load body hinge pin as low as possible in order to improve the life of the pins. This article focuses on the ways of reducing the force on the load body hinge pin. Methodology The location of the Center of Gravity (C.G.) of the loaded body was estimated based on the shape of the load body and type of material it carried. (Generally, urban refuse will have comparatively lesser density, and this needs to be taken into account while estimating the location of C.G.). The total load during hoisting (payload and weight of the
- 4. 4 load body) was taken as acting through this C.G. Kinematic model of the hoisting linkage mechanism was set-up, and the design parameters were arrived at by iterations, to achieve the desired tipper body rotation. A total rotation of 85° was considered for the load body during hoisting, and the instantaneous values of length of the hydraulic cylinder(L) and vertical position of C.G.(H) were determined with respect to the angular orientation (θ) of the load body using kinematic relationships. Once the linkage dimensions were achieved, force analysis was carried out to determine the pin forces and the cylinder force. The methodology was verified by calculating the minimum and maximum cylinder lengths of an existing popular Hopper Tipper (using measured lengths of it’s links) and then comparing these values with the actual cylinder minimum and maximum lengths measured. Calculation of hinge pin force was then carried out to establish the reference value. The main objective of the investigation was to seek an alternative 4- Bar linkage mechanism resulting in lower levels of load body hinge pin force, while meeting the kinematic requirement (continuous movement of the load body with respect to the cylinder stroke). Secondary objective was to have shorter cylinder lengths. In addition, feasibility of using a 6-Bar mechanism, and the pros and cons of the same are also investigated. Analysis of existing 4-Bar linkage Fig-6 shows Hopper Tipper load body during normal and dumping conditions, and the corresponding orientations of the 4-Bar hoisting mechanism. a. Hopper Tipper in Normal and Dumping Conditions b. Orientation of 4-Bar Mechnaism Used for Hoisting Fig-6 4-Bar Mechanism Analysis Scheme
- 5. 5 The following parameters, obtained from the measurement of an existing Hopper Tipper, were used for the analysis of existing 4-Bar mechanism : Sl No Parameter Symbol Value Unit Remarks 1 Total weight of body with material WLB 500 Kgs Fixed design parameter(Input) 2 Angular orientation of load body from normal position θ 0-85 Degrees Design parameter- Independent variable 3 Initial position of CG from hinge pin level H1 (-50) mm Dependent variable 4 Final position of CG from hinge pin level H2 (1100) mm Dependent variable 5 Distance between CG and body hinge pin (C.G. moment arm) R 1110 mm Fixed design parameter 6 Dimension – Horizontal distance between body hinge pin and cylinder anchor point on chassis xc 85 mm Primary design parameter 7 Dimension - Vertical distance between body hinge pin and cylinder anchor point on chassis yc 240 mm Primary design parameter 8 Dimension - Side of the triangle formed between C.G., body hinge pin and cylinder force application point on the load body. b 575 mm Secondary design parameter 9 Dimension - Side of the triangle formed between C.G., body hinge pin and cylinder force application point on the body. c 870 mm Secondary design parameter 10 Application Force in the hydraulic cylinder required to hoist load body Fc N Calculated (Output) 11 Reaction Force in the hinge pin of the load body. Fr N Calculated (Output) Table-1 Mathematically, cylinder stroke, cylinder force and pin reaction force are represented as: L= ʄ (θ,xc,yc,R,b,c) ; Fc = ʄ (WLB,L,θ,xc,yc,R,b,c) ; Fr = ʄ (WLB,Fc,L,xc,yc,R,b,c) The steps involved in calibrating the calculations are as follows : 1. Measure and record the linkage dimensions, dimensions of the load body, minimum and maximum cylinder lengths during normal and dumping conditions. 2. Using the measured values calculate the theoretical minimum and maximum lengths of the cylinder (Lmin, Lmax) 3. Check if the calculated values of Lmin and Lmax match with the measured values. 4. Once the calculation has been verified with the actual measured values, then, using the weight of the loaded body acting at the CG as input, carry out force resolution in the linkages to calculate the cylinder force and force at the load body hinge pin. For the example taken, the comparison between the measured and calculated values of cylinder lengths are given below : Sl No Parameter Measured value Calculated value 1 Minimum length of the cylinder, mm 680 684 2 Maximum length of the cylinder, mm 1030 1028 3 Maximum Hinge pin force, N Not applicable 30518 Table-2
- 6. 6 The comparison shows that the methodology used for kinematic analysis is appropriate for the given purpose. Variation of load body hinge pin reaction force with respect to the rotation of the load body is shown in the graph Fig-7: Fig-7 Variation of Resultant Hinge Pin Force With Respect to Load Body Rotation Synthesis of new 4-Bar linkages and their analysis : Keeping the basic arrangement of link elements same, by changing the cylinder connection points two alternative 4 bar linkage arrangements were arrived at for evaluation.Fig-8 a. Existing a. Alternative-1 b. Alternative-2 Fig-8 Existing and Proposed Alternative 4-Bar Linkage Mechanisms The synthesis and analysis of new mechanisms were carried out as given below : 1. Parameters Xc and Yc were changed to move the anchor point of the cylinder. Similarly, keeping R and the relative position of C.G. in the load body same,parameters b and c were changed to alter the connection point of the cylinder with the load body. 2. For each set of the above parameters, cylinder minimum and maximum lengths were calculated to achieve 85° rotation of the load body. 3. Kinematic compatibility, like the ratio and/or difference between minimum and maximum cylinder lengths, minimum and maximum angles between adjacent links,etc, was considered. 4. By iteration, two feasible sets of parameters satisfying the kinematic compatibility were arrived at(Alternative-1 and Alternative-2). 0 5000 10000 15000 20000 25000 30000 35000 0 20 40 60 80 100 Force,N→ Load Body Tilt in Degrees
- 7. 7 5. Force resolution was carried out for the final configurations to arrive at the cylinder force and the load body hinge pin force The results were compiled in the following table : Sl No Parameter Existing (calculated) Alternative-1 Alternative-2 1 Minimum length of the cylinder, mm 684 591 271 2 Maximum length of the cylinder, mm 1028 1014 420 3 Maximum Hinge pin force, N 30518 10963 36898 Table-3 Variation of load body hinge pin reaction force with respect to the rotation of the load body is shown in the graph.Fig-9 : Existing 4-Bar Linkage Alternative-1,4-Bar Linkage Alternative-2, 4-Bar Linkage Fig- 9 Comparison of Variation of Hinge Pin Force with Respect to Load Body Rotation Synthesis of a new 6-Bar linkage and it’s analysis : A 6-Bar linkage was conceived for adaptation, considering functionality, simplicity of kinematics and space utilisation. a. Watt II Mechanism b. Adaptation on Vehicle c. Kinematic Representation and Analysis Scheme Fig -10 6-Bar Mechanism Analysis Scheme 0 10000 20000 30000 40000 0 50 100 Force,N→ Load Body Tilt in Degrees 0 2000 4000 6000 8000 10000 12000 0 50 100 Force,N→ Load Body Tilt in Degrees 0 10000 20000 30000 40000 0 50 100 Force,N→ Load Body Tilt in Degrees
- 8. 8 Synthesis of a 6-Bar linkage to suit an application is more challenging since the number of design variables required for the solution are more. Keeping this in mind, a standard Watt II type linkage was adapted for this application. The increased complexity of analysis is reflected in the mathematical expression for cylinder stroke, cylinder force, and pin reaction force : L= ʄ (θ,xc,yc,xp,yp,R,b,c,l,m,n,p) ; Fc = ʄ (WLB,L,θ,xc,yc, xp,yp,R,b,c,l,m,n,p) Fr = ʄ (WLB,L,θ,xc,yc, xp,yp,R,b,c,l,m,n,p) A brief description of mechanism synthesis and analysis procedure is given below : 1. A standard Watt II linkage is adapted. The mechanism consists of 2 ternary links,one binary link and a sliding pair(hydraulic cylinder), and the machine chassis forming the common fixed link. Fig-10. Parameters Xc ,Yc ,Xp and Yp were decided on the basis of space available on vehicle chassis for the fixed hinges. Similarly, keeping R and the relative position of C.G in the load body same,parameters b and c were changed to alter the connection point of the cylinder with the load body. 2. For each set of the above parameters, cylinder minimum and maximum lengths were calculated to achieve the required 85° rotation of the load body. 3. Kinematic compatibility, like the ratio and/or difference between minimum and maximum cylinder lengths, minimum and maximum angles between adjacent links,etc were ensured. 4. By iteration, two feasible sets of parameters satisfying the kinematic compatibility were arrived at. 5. Force resolution was carried out for the final configuration to arrive at the cylinder force and the hinge pin reaction force Variation of load body hinge pin reaction force with respect to the rotation of the load body when a 6-Bar linkage is adapted is shown in the graph. Fig-11 : Fig-11 6-Bar Linkage. Variation of Resultant Hinge Pin Force with Respect to Load Body Rotation 0 5000 10000 15000 20000 25000 0 20 40 60 80 100 Force,N→ Load Body Tilt in Degrees
- 9. 9 Result : The results of the 4-Bar and 6-Bar linkage were compiled in the following table : Sl No Parameter Existing 4-Bar (calculated) Alternative-1 4-Bar Alternative-2 4-Bar Alternative-3 6-Bar 1 Minimum length of the cylinder, mm 684 591 271 255 2 Maximum length of the cylinder, mm 1028 1014 420 432 3 Maximum hinge pin force, N 30518 10963 36898 21383 Table-4 Discussion : There are several ways in which a 4-Bar linkage can be used to accomplish the task of hoisting a load body in a Hopper Tipper. The two alternative linkage arrangement proposed are found to be functionally satisfactory (hoisting to a rotation of 85°). However, looking at the tabulated results and the performance graphs, it is clear that design engineers who want to meet the twin objectives of compact cylinder size and lower hinge pin reaction force will have to compromise on at least one of them. Hence, exploring other options, like a 6-Bar linkage arrangement for hoisting is desirable. In this investigation only one arrangement of a 6-Bar linkage to replace the 4-Bar linkage was studied. Comparing the results of analysis with those of 4-Bar linkages, it is evident that, both the design goals could be achieved with a 6-Bar linkage. It may be noted here that, prima-facie, a 6-Bar linkage has more number of parts, and hence costs more compared to a 4-Bar linkage. However, two aspects of a 6-Bar linkage still make it worth considering as an option –1). possibility of optimising the link sizes to achieve shorter cylinder sizes and lower pin forces compared to what has been shown in this article, and,2). to use variants of the 6-Bar linkage to make the Hopper Tipper versatile. Conclusion : 1. Most popular Hopper Tippers used today have 4-Bar linkage with hydraulic cylinder for load body hoisting. Although the linkage arrangement is functionally adequate, it results in longer cylinder and also higher hinge pin reaction force. . 2. Out of the two alternative 4-Bar linkages considered, one (alternative-1) achieves a reduced hinge pin reaction force, using almost same cylinder length as the existing arrangement. 3. The second alternative gives the most compact packaging arrangement due to shorter cylinder, but results in much higher hinge pin reaction force.. 4. A 6-bar linkage arrangement results in shorter cylinder length as well as lower hinge pin reaction force. But, on the flip side,a 6-Bar arrangement requires more number of components.. 5. Scope for further study - 1). A careful optimisation study can result in even more efficient design - occupying lesser space, shorter cylinder length and lesser pin reaction force. 2). Development of variants of 6-Bar mechanisms to use in Hopper Tippers targeting new applications.