導入 II
Vapnik の思想[Vapnik, 98]
Nothing is more practical than a good theory.
理論に基づいたアルゴリズム
• カーネル法 (サポートベクターマシン)
• ブースティング (アダブースト)...
このセミナーでは [4] を読んで機械学習の理論的側面に親しみ
たい.
本スライドは [4] の第 1 章のまとめである.
2
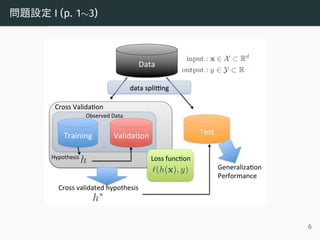
問題設定 I (p.1∼3)
Data
Training Valida,on Test
Cross Valida,on
Cross validated hypothesis
Generaliza,on
Performance
data spli<ng
input : x X Rd
output : y Y R
Observed Data
h
h
Hypothesis
(h(x), y)
Loss func,on
6
8.
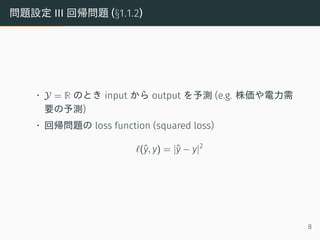
問題設定 II 判別問題(§1.1.1)
• |Y| < ∞ のとき, input data から label を予測する.
• |Y| = 2 : 2 値判別 (e.g. 迷惑メール分類
Y = {“spam”, “nonspam”})
• |Y| ≥ 3 : 多値判別
• 判別問題における loss function (0-1 loss)
ℓ(ˆy, y) = 1[ˆy ̸= y] =
1 if y ̸= ˆy
0 otherwise
=
ℓy if y ̸= ˆy
0 otherwise
損失が真ラベルに依存する場合
7
9.
問題設定 III 回帰問題(§1.1.2)
• Y = R のとき input から output を予測 (e.g. 株価や電力需
要の予測)
• 回帰問題の loss function (squared loss)
ℓ(ˆy, y) = |ˆy − y|2
8
10.
問題設定 IV ランキング問題(§1.1.3)
• 3 つ組 data (x, x′, y) ∈ X2 × Y を観測
y =
+1 if x ≻ x′
−1 if x ≺ x′
• 以下のような仮説 h : X → R を学習
x ≻ x′
⇒ h(x) > h(x′
)
x ≺ x′
⇒ h(x) ≤ h(x′
)
• ランキング問題の loss function (0-1 loss)
ℓ(ˆh, y) =
1 if y(h1 − h2) ≤ 0
0 otherwise
ここで h1 = h(x), h2 = h(x′), ˆh = (h1, h2) ∈ R2.
0 − 1 損失の下でランキング問題は判別として扱える.
9
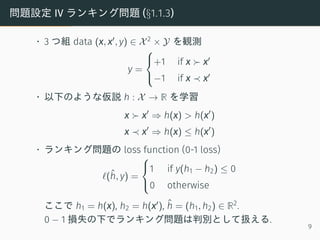
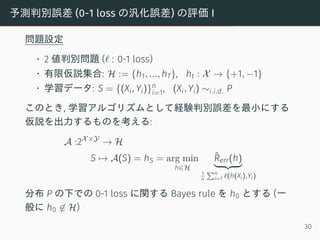
予測損失と経験損失 I
Definition 1(予測 (期待) 損失)
test data (X, Y) の従う分布 D の下での仮説 h の予測損失を以
下で定義
R(h) := E(X,Y)∼D[ℓ(h(X), Y)]
Example 1 (0-1 loss)
0-1 loss の予測損失 (期待判別誤差) は
Rerr(h) = Pr[h(X) ̸= Y] = E[1[h(X) ̸= Y]]
学習の目標
data の真の分布が未知なため直接計算不可能な期待損失を観
測 data のみを用いて小さくする 11
13.
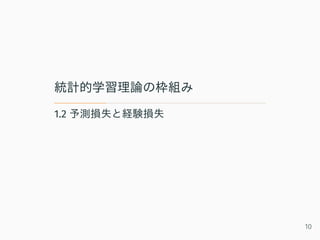
予測損失と経験損失 II
Definition 2(経験損失)
{(Xi, Yi)}n
i=1 : observed data
仮説 h の経験損失を以下で定義
ˆR(h) :=
1
n
n∑
i=1
ℓ(h(Xi), Yi)
経験分布による表現
ˆD : 経験分布 i.e. (X, Y) ∼ D ⇐⇒ Pr[(X, Y) = (Xi, Yi)] = 1
n
とするとき,
ˆR(h) = E(X,Y)∼ ˆD[ℓ(h(X), Y)]
予測損失 R(h) と経験損失 ˆR(h) の違いは期待値を真の分布 D
で取るか, 経験分布 ˆD で取るかの違い
12
14.
予測損失と経験損失 III
Fact 1
(Xi,Yi) ∼ D (identically distributed)
=⇒ E[ˆR(h)] = R(h)
i.e. ˆR は R の不偏推定量.
(∵) Dn : (Xi, Yi), i = 1, ..., n の joint distribution とするとき,
EDn [ˆR(h)] = EDn
[
1
n
n∑
i=1
ℓ(h(Xi), Yi)
]
=
1
n
n∑
i=1
ED[ℓ(h(Xi), Yi)]
R(h)
= R(h) 2
13
15.
予測損失と経験損失 IV
経験損失は予測損失の不偏推定量: E[ˆR(h)]= R(h)
• 上の事実は data の独立性を仮定していない. 独立性がある
と, さらに一致性が示せる(大数の弱法則) :
Proposition 1
(Xi, Yi) ∼i.i.d. D のとき, ∀ε > 0,
lim
n→∞
PrDn [|ˆR(h) − R(h)| > ε] = 0
• 様々な学習問題は, 予測損失 R の最小化が目標 (分布 D が
未知なので R も未知)
−→ 代理として経験損失 ˆR の最小化を通して R を小さ
くする
14
References
[1] Olivier Bousquet,Stéphane Boucheron, and Gábor Lugosi.
Introduction to statistical learning theory. In Advanced
lectures on machine learning, pages 169–207. Springer, 2004.
[2] Mehryar Mohri, Afshin Rostamizadeh, and Ameet Talwalkar.
Foundations of machine learning. MIT press, 2012.
[3] Shai Shalev-Shwartz and Shai Ben-David. Understanding
machine learning: From theory to algorithms. Cambridge
university press, 2014.
[4] 金森敬文. 統計的学習理論 (機械学習プロフェッショナルシ
リーズ), 2015.
41
![導入 II
Vapnik の思想 [Vapnik, 98]
Nothing is more practical than a good theory.
理論に基づいたアルゴリズム
• カーネル法 (サポートベクターマシン)
• ブースティング (アダブースト)...
このセミナーでは [4] を読んで機械学習の理論的側面に親しみ
たい.
本スライドは [4] の第 1 章のまとめである.
2](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-3-320.jpg)


![問題設定 II 判別問題 (§1.1.1)
• |Y| < ∞ のとき, input data から label を予測する.
• |Y| = 2 : 2 値判別 (e.g. 迷惑メール分類
Y = {“spam”, “nonspam”})
• |Y| ≥ 3 : 多値判別
• 判別問題における loss function (0-1 loss)
ℓ(ˆy, y) = 1[ˆy ̸= y] =
1 if y ̸= ˆy
0 otherwise
=
ℓy if y ̸= ˆy
0 otherwise
損失が真ラベルに依存する場合
7](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-8-320.jpg)
![予測損失と経験損失 I
Definition 1 (予測 (期待) 損失)
test data (X, Y) の従う分布 D の下での仮説 h の予測損失を以
下で定義
R(h) := E(X,Y)∼D[ℓ(h(X), Y)]
Example 1 (0-1 loss)
0-1 loss の予測損失 (期待判別誤差) は
Rerr(h) = Pr[h(X) ̸= Y] = E[1[h(X) ̸= Y]]
学習の目標
data の真の分布が未知なため直接計算不可能な期待損失を観
測 data のみを用いて小さくする 11](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-12-320.jpg)
![予測損失と経験損失 II
Definition 2 (経験損失)
{(Xi, Yi)}n
i=1 : observed data
仮説 h の経験損失を以下で定義
ˆR(h) :=
1
n
n∑
i=1
ℓ(h(Xi), Yi)
経験分布による表現
ˆD : 経験分布 i.e. (X, Y) ∼ D ⇐⇒ Pr[(X, Y) = (Xi, Yi)] = 1
n
とするとき,
ˆR(h) = E(X,Y)∼ ˆD[ℓ(h(X), Y)]
予測損失 R(h) と経験損失 ˆR(h) の違いは期待値を真の分布 D
で取るか, 経験分布 ˆD で取るかの違い
12](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-13-320.jpg)
![予測損失と経験損失 III
Fact 1
(Xi, Yi) ∼ D (identically distributed)
=⇒ E[ˆR(h)] = R(h)
i.e. ˆR は R の不偏推定量.
(∵) Dn : (Xi, Yi), i = 1, ..., n の joint distribution とするとき,
EDn [ˆR(h)] = EDn
[
1
n
n∑
i=1
ℓ(h(Xi), Yi)
]
=
1
n
n∑
i=1
ED[ℓ(h(Xi), Yi)]
R(h)
= R(h) 2
13](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-14-320.jpg)
![予測損失と経験損失 IV
経験損失は予測損失の不偏推定量: E[ˆR(h)] = R(h)
• 上の事実は data の独立性を仮定していない. 独立性がある
と, さらに一致性が示せる(大数の弱法則) :
Proposition 1
(Xi, Yi) ∼i.i.d. D のとき, ∀ε > 0,
lim
n→∞
PrDn [|ˆR(h) − R(h)| > ε] = 0
• 様々な学習問題は, 予測損失 R の最小化が目標 (分布 D が
未知なので R も未知)
−→ 代理として経験損失 ˆR の最小化を通して R を小さ
くする
14](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-15-320.jpg)
![ベイズ規則とベイズ誤差 II
Bayes rule を具体的に求めてみる.
• ℓ(ˆy, y) : loss 関数
• P : test distribution
とするとき,
R(h) = E(X,Y)∼P[ℓ(ˆy, y)] = EX [EY [ℓ(ˆy, y)|X]]
(∵)
EX[EY [ℓ(h(x), y)|X]
(⋄)
] =
∫
X
{∫
Y
ℓ(h(x), y)dP(y|x)
}
dP(x)
=
∫
X×Y
ℓ(h(x), y)dP(x, y)
= R(h) 2
積分の単調性から (⋄) を小さくする h を選べば予測損失も小さ
くなる 17](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-18-320.jpg)
![Example 1.1 判別問題
• 0-1loss を用いると,
(⋄) =
∑
y∈Y
ℓ(h(X), Y)P(Y = y|X) = 1 − P(Y = h(X)|X)
より,
h0(X) = arg max
y∈Y
P(Y = y|X)
が予測誤差を最小にする仮説 (input に対して最も出現確
率の大きなラベルを出力)
• このときの Bayes error は
R∗
= 1 − EX
[
max
y∈Y
P(Y = y|X)
]
18](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-19-320.jpg)
![Example 1.2 回帰問題
• 2 乗 loss を用い, Y の分散を V[Y] とおくと,
EY[ℓ(h, Y)] = E[h2
− 2hY + Y2
]
= E[h2
] − 2E[hY] + E[Y2
] + E[Y2
] − E[Y]2
= h2
− 2hE[Y] + E[Y]2
+ E[Y2
] − E[Y]2
V[Y]
= (h − E[Y])2
+ V[Y]
第 1 項を最小にする h が Bayes rule
• このとき, Bayes error は
R∗
= R(h0) = EX[EY[ℓ(h0(X), Y)|X]
V[Y|X]
]
= E[V[Y|X]]
条件付き分散が一定値 σ2 ならば, Bayes error も σ2
19](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-20-320.jpg)
![Example 1.3 ランキング問題 II
Definition 4 (true positive rate / false positive rate)
しきい値 a ∈ R に対して,
TPh(a) := Ex+∼D+ [1[h(x+) > a]]
FPh(a) := Ex−∼D− [1[h(x−) > a]]
• TPh(a) : しきい値 a において positive sample を正しく
positive と判定出来ている割合.
• FPh(a) : しきい値 a において negative sample を誤って
positive と判定している割合.
a ∈ R に対して, (FPh(a), TPh(a)) ∈ [0, 1]2
21](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-22-320.jpg)
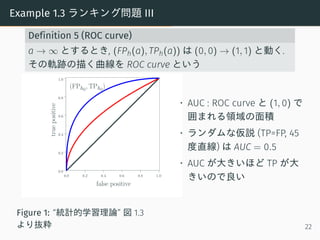
![Example 1.3 ランキング問題 IV
期待損失と AUC との関係
0-1 loss の下で,
R(h) = 1 − Ex±∼D± [1[h(x+) − h(x−) > 0]]
= 1 − Ex−∼D− [Ex+∼D+ [1[h(x+) > h(x−)]]
TPh(h(x−))
]
= 1 − Ex−∼D− [TPh(h(x−))]
AUC(h)
= 1 − AUC(h)
よって x+x− のとき,
• h0 = arg max AUC(h)
• Bayes error = 1 − AUC(h0)
23](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-24-320.jpg)
![学習アルゴリズムの性能評価 II
A の性能の評価指標
1. 予測損失の学習データに関する期待値をとる:
ES∼Dn [R(hS)]
−→ A の平均的な性能を評価
2. 汎化誤差の分布を評価:
Bayes error を R∗ = inf R(h) とおく. ε > 0 と δ ∈ (0, 1) に
対して
Pr[R(hS) − R∗
< ε] > 1 − δ
が成り立つとする.
→ 十分大きい確率 1 − δ に対して ε を十分小さく取れれば
Bayes error に近い予測損失を達成する仮説が求まる
26](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-27-320.jpg)
![学習アルゴリズムの性能評価 III
Fact 2 (評価指標 1 と 2 の関係)
PS∼Dn [R(hS) − R∗
≥ ε] ≤
ES∼Dn [R(hS)] − R∗
ε
• 予測損失と Bayes error の差が ε 以上である確率は, 予測損
失の期待値と Bayes error の差で上から抑えられる
(∵) Markov’s inequality :
P(|X| ≥ a) ≤
E[|X|]
a
, a > 0
より, |X| = R(hS) − R∗, a = ε とおくと直ちに従う 2
27](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-28-320.jpg)
![学習アルゴリズムの性能評価 IV
Definition 7 (統計的一致性)
∀D : distribution, ∀ε > 0 に対して, 学習アルゴリズム
A : S → hS が統計的一致性をもつ
:⇐⇒ lim
n→∞
PS∼Dn [R(hS) − R∗
≤ ε] = 1
“data が多ければ最適な仮説を達成する” という良い学習アル
ゴリズムの性質
28](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-29-320.jpg)
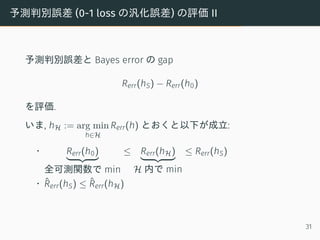
![予測判別誤差 (0-1 loss の汎化誤差) の評価 III
Rerr(hS) − Rerr(h0)
= Rerr(hS) − ˆRerr(hS) + ˆRerr(hS) − Rerr(hH) + Rerr(hH) − Rerr(h0)
≤ Rerr(hS) − ˆRerr(hS) + ˆRerr(hH) − Rerr(hH) + Rerr(hH) − Rerr(h0)
≤ max
h
|ˆRerr(h) − Rerr(h)| + max
h
|ˆRerr(h) − Rerr(h)| + Rerr(hH) − Rerr(h0)
= 2 max
h
|ˆRerr(h) − Rerr(h)| + Rerr(hH) − Rerr(h0) − (⋄)
ここで (⋄) の第 1 項に Hoeffding’s inequality を使う
Lemma 1 (Hoeffding’s inequality)
Z : [0,1]-valued r.v. で Z1, ..., Zn ∼i.i.d. PZ のとき, ε > 0,
P
[
1
n
n∑
i=1
Zi − E[Z] ≥ ε
]
≤ 2e−2nε2
32](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-33-320.jpg)
![予測判別誤差 (0-1 loss の汎化誤差) の評価 IV
Hoeffding’s inequality の Z として 1[h(X) ̸= Y] を取ると,
P
[
2 max
h∈H
|ˆRerr(h) − Rerr(h)| ≥ ε
]
≤
∑
h∈H
P
[
|ˆRerr(h) − Rerr(h)| ≥
ε
2
]
≤2e−2nε2/4
≤ 2|H|e−nε2/2
ここで, δ = 2|H|e−nε2/2 とおくと, 学習データ S が given の下で
P
[
Rerr(hS) − Rerr(h0) ≤ Rerr(hH) − Rerr(h0) +
√
2
n
log
2|H|
δ
]
≥ 1 − δ
が成立.
33](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-34-320.jpg)
![予測判別誤差 (0-1 loss の汎化誤差) の評価 V
P
[
Rerr(hS) − Rerr(h0) ≤ Rerr(hH) − Rerr(h0) +
√
2
n
log
2|H|
δ
]
≥ 1 − δ
(∵)
δ = 2|H|e−nε2/2
⇐⇒
δ
2|H|
= e−nε2/2
⇐⇒ log
δ
2|H|
=
−nε2
2
⇐⇒ ε2
=
2
n
log
2|H|
δ
より,
P
[
2 max
h∈H
|ˆRerr(h) − Rerr(h)| ≥ ε
]
≤ 2|H|e−nε2/2
⇐⇒ P
[
2 max
h∈H
|ˆRerr(h) − Rerr(h)| ≤
√
2
n
log
2|H|
δ
]
≥ 1 − δ
34](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-35-320.jpg)
![予測判別誤差 (0-1 loss の汎化誤差) の評価 VI
(⋄) の第 1 項を上の評価で置き換えると,
Rerr(hS) − Rerr(h0) ≤
√
2
n
log
2|H|
δ
+ Rerr(hH) − Rerr(h0) w.p. 1 − δ
が言える 2
• 仮説集合 H が Bayes rule を含むとき (hH = h0 のとき) :
Rerr(hH) − Rerr(h0) = 0
=⇒ Rerr(hS) −→ Rerr(h0) as n → ∞
• 確率オーダー表記 (cf 例 2.1):
Rerr(hS) = Rerr(h0) + Op
(√
log |H|
n
)
i.e. lim
z→∞
lim sup
n→∞
P[|Rerr(hS)|/
√
log |H|/n > z] = 0
35](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-36-320.jpg)
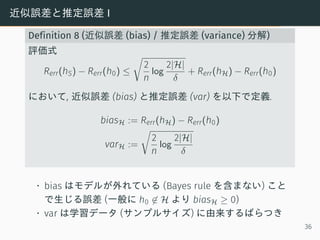
![近似誤差と推定誤差 III
予測誤差を小さくする仮説集合 Hˆm として, 以下を満たすもの
が良さそう
ˆm = arg min
1≤m≤M
[biasHm + varHm ]
• bias が data 分布に依存するため上手い基準ではない
→ 正則化
38](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-39-320.jpg)
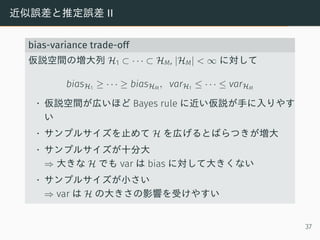
![正則化 I
アイデア: 大きな仮説集合から仮説を選ぶことに対してペナル
ティを課す
Definition 9 (ペナルティ関数)
仮説集合の増大列 H1 ⊂ · · · ⊂ HM. Φ : Hm → R≥0 が仮説 h に
対するペナルティ関数
:⇐⇒ m1 < m2 に対して, h ∈ Hm1 , h′ ∈ Hm2 Hm1 ⇒
Φ(h) ≤ Φ(h′)
Example 2 (大きい仮説集合ほどペナルティも大きい)
H0 = ∅ として, 0 < w1 < · · · < wM に対して
Φ(h) =
M∑
m=1
wm1[h ∈ HmHm−1]
39](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-40-320.jpg)
![References
[1] Olivier Bousquet, Stéphane Boucheron, and Gábor Lugosi.
Introduction to statistical learning theory. In Advanced
lectures on machine learning, pages 169–207. Springer, 2004.
[2] Mehryar Mohri, Afshin Rostamizadeh, and Ameet Talwalkar.
Foundations of machine learning. MIT press, 2012.
[3] Shai Shalev-Shwartz and Shai Ben-David. Understanding
machine learning: From theory to algorithms. Cambridge
university press, 2014.
[4] 金森敬文. 統計的学習理論 (機械学習プロフェッショナルシ
リーズ), 2015.
41](https://image.slidesharecdn.com/sltsec1-181004081130/85/1-42-320.jpg)

![[DL輪読会]Scalable Training of Inference Networks for Gaussian-Process Models](https://cdn.slidesharecdn.com/ss_thumbnails/mainslideshare1-190927025239-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]近年のエネルギーベースモデルの進展](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-200124020855-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]NVAE: A Deep Hierarchical Variational Autoencoder](https://cdn.slidesharecdn.com/ss_thumbnails/nvaeadeephierarchicalvariationalautoencoder-201113004930-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...](https://cdn.slidesharecdn.com/ss_thumbnails/20190426akuzawa-190426020057-thumbnail.jpg?width=640&height=640&fit=bounds)
























![[DL輪読会]Deep Learning 第5章 機械学習の基礎](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearning5-180601021956-thumbnail.jpg?width=640&height=640&fit=bounds)













