1. PT. PUPUK SRIWIJAYA PALEMBANG
1 PT. PETROKIMIA GRESIK
A. INFORMASI MESIN/TEKNIS
Mesin : Blower Prilling Tower (3U-GB302)
Power : 480 KW
Speed Motor : 1500 Rpm
Speed Fan : 1500 Rpm
Transmission : Rubber Insert Type Coupling
Standard Vibrasi : max 7.1 mm/s-RMS (ditentukanberdasarkan ISO 10816-3,
terlampir)
Waktu balancing : Rabu 14Mei 2014
Alatakuisis data : CSI-2130® Machinery Analyzer & Balancer serta
Machinery Health Manager® PC Software.
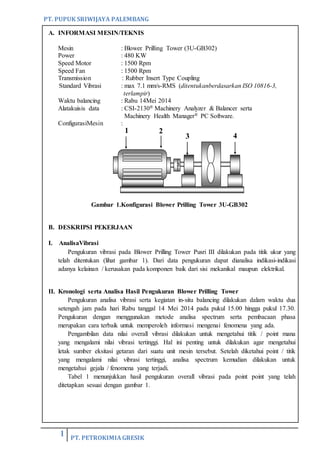
ConfigurasiMesin :
Gambar 1.Konfigurasi Blower Prilling Tower 3U-GB302
B. DESKRIPSI PEKERJAAN
I. AnalisaVibrasi
Pengukuran vibrasi pada Blower Prilling Tower Pusri III dilakukan pada titik ukur yang
telah ditentukan (lihat gambar 1). Dari data pengukuran dapat dianalisa indikasi-indikasi
adanya kelainan / kerusakan pada komponen baik dari sisi mekanikal maupun elektrikal.
II. Kronologi serta Analisa Hasil Pengukuran Blower Prilling Tower
Pengukuran analisa vibrasi serta kegiatan in-situ balancing dilakukan dalam waktu dua
setengah jam pada hari Rabu tanggal 14 Mei 2014 pada pukul 15.00 hingga pukul 17.30.
Pengukuran dengan menggunakan metode analisa spectrum serta pembacaan phasa
merupakan cara terbaik untuk memperoleh informasi mengenai fenomena yang ada.
Pengambilan data nilai overall vibrasi dilakukan untuk mengetahui titik / point mana
yang mengalami nilai vibrasi tertinggi. Hal ini penting untuk dilakukan agar mengetahui
letak sumber eksitasi getaran dari suatu unit mesin tersebut. Setelah diketahui point / titik
yang mengalami nilai vibrasi tertinggi, analisa spectrum kemudian dilakukan untuk
mengetahui gejala / fenomena yang terjadi.
Tabel 1 menunjukkan hasil pengukuran overall vibrasi pada point point yang telah
ditetapkan sesuai dengan gambar 1.
3
1 2
3 4
2. PT. PUPUK SRIWIJAYA PALEMBANG
2 PT. PETROKIMIA GRESIK
Tabel 1.Hasil Pengukuran Overall Vibrasi Blower Prilling Tower 3U-GB302
Tabel 1 menunjukkan bahwa point 3 merupakan titik yang mengalami vibrasi tertinggi.
Nilai ini mengindikasikan bahwa letak sumber eksitasi vibrasi memiliki lokasi yang paling
dekat dengan point 3. Sumber eksitasi tersebut memiliki beberapa kemungkinan yang ada,
diantaranya adalah dari impeller, kopling, bearing, housing bearing, maupun struktur /
pondasi bearing point 3.
Analisa Spektrum merupakan langkah terbaik untuk mengetahui gejala/fenomena yang
terjadi pada point 3. Gambar 2, Gambar 3, serta Gambar 4 menunjukkan spectrum
frekuensi point 3 Horizontal, Vertikal, maupun aksial.
Gambar 2.Spektrum Fan Inboard Horizontal Point 3.
TitikUkur Description
Overall Vibrasi
RMS (mm/s)
Zona Status
1
MOH Motor Outboard Horizontal 4.03 B
MOV Motor Outboard Vertial 1.92 A
MOA Motor Outboard Aksial 2.18 A
2
MIH Motor Inboard Horizontal 4.94 C
MIV Motor Inboard Vertikal 3.14 B
MIA Motor Inboard Aksial 2.48 B
3
FIH Fan Inboard Horizontal 5.87 C
FIV Fan Inboard Vertikal 5.89 C
FIA Fan Inboard Aksial 13.90 D
4
FOH Fan Outboard Horizontal 3.30 B
FOV Fan Outboard Vertikal 5.61 C
FOA Fan Outboard Aksial 4.39 B
3. PT. PUPUK SRIWIJAYA PALEMBANG
3 PT. PETROKIMIA GRESIK
Gambar 3.Spektrum Fan Inboard Vertikal Point 3.
Gambar 4.Spektrum Fan Inboard Aksial Point 3.
Dari gambar spectrum tersebut tampak bahwa pada titik ukur horizontal, vertical,
maupun aksial didominasi oleh frekuensi 1 X RPM dengan diikuti amplitude kecil
spectrum harmonic hingga 7 X RPM. Spektrum dominan 1 X RPM arah radial
menunjukkan indikasi adanya beberapa fenomena yang terjadi yaitu Unbalance, Non-
Rotating Looseness, serta misalignment. Sedangkan spectrum dominan 1 X RPM arah
aksial menunjukkan indikasi adanya fenomena bent shaft serta angular misalignment.
Untuk mengetahui fenomena-fenomena tersebut diperlukan analisa lebih lanjut yaitu
pembacaan phasa. Gambar 5 menunjukkan pembacaan phasa dimana sensor accelerometer
diletakkan antara Motor Inboard point 2 dengan Bearing Inboard point 3.
Gambar 5.Pembacaanphasa point 2 dengan point 3
PhasaarahVertikal : 32o
PhasaarahHorizontal : 38o
PhasaarahAksial: 56o
4. PT. PUPUK SRIWIJAYA PALEMBANG
4 PT. PETROKIMIA GRESIK
Pembacaan phasa diatas menunjukkan bahwa kondisi misalignment baik secara pararel
misalignment maupun angular misalignment tidak terjadi pada unit blower prilling tower
3U-GB302. Semua sambungan kopling masih dalam kondisi In-Phase (0-60o) dan tidak
dalam kondisi Out-Of-Phase (± 180o).
Pararel Misalignment ditandai dengan adanya amplitudo spectrum 2 X RPM pada arah
radial yang lebih tinggi dibandingkan dengan spectrum 1 X RPM.Gambar spectrum arah
radial (Gambar 2 & Gambar 3) menunjukkan bahwa amplitudo spectrum 1 X RPM jauh
lebih dominan daripada amplitude 2 X RPM, sehingga dapat dipastikan bahwa fenomena
pararel misalignment tidak terjadi pada unit tersebut.
Angular Misalignment ditandai dengan adanya nilai vibrasi yang tinggi pada arah aksial
dimana amplitude spectrum 2 X RPM memiliki nilai minimal ± 1/3 dari amplitude
spectrum 1 X RPM. Spectrum frekuensi arah aksial (Gambar 4) menunjukkan bahwa nilai
amplitude 2 X RPM jauh dibawah nilai 1/3 dari amplitude 1 X RPM sehingga dapat
dipastikan bahwa fenomena angular misalignment tidak terjadi pada unit tersebut.
Rotating Looseness ditandai dengan adanya amplitude spectrum harmonic yang tinggi
pada arah radial maupun aksial diikuti dengan peningkatan level noise floor. Gambar
spectrum arah radial maupun aksial menunjukkan adanya spectrum harmonic hingga 8 X
RPM, namun tidak diikuti dengan peningkatan pada noise floor sehingga dapat dipastikan
bahwa rotating looseness tidak terjadi pada unit 3U-GB302.
Bent-Shaft ditandai dengan adanya nilai vibrasi tinggi arah aksial dengan spectrum
dominan 1 X RPM diikuti dengan spectrum 2 X RPM. Gambar 4 diatas menunjukkan
bahwa spectrum frekuensi arah aksial memiliki bentuk yang mirip dengan ciri-ciri seperti
bent shaft. Hal ini perlu dikonfirmasi lebih lanjut dengan menggunakan pembacaan phasa
(lihat gambar 6). Ternyata beda phasa 32o arah aksial masih dalam kondisi in phase (0 –
60o) sehingga dapat dipastikan tidak terjadi bent shaft.
Rotor Rub ditandai dengan adanya spectrum harmonic hingga 5 X RPM dimana tidak
terjadi peningkatan pada noise floor. Rotor Rub juga dapat diakibatkan oleh fenomena
unbalance. Gaya unbalance menghasilkan gaya sentrifugal yang besar sehingga dapat
menyebabkan impeller akan begerak ke arah luar dan dapat menyebabkan fenomena seperti
rotor rub. Untuk memastikan fenomena unbalance, maka analisa phasa serta menggunakan
program balance pada akuisisi data CSI-2130 merupakan cara yang terbaik. Penggunaan
program balance merupakan langkah terakhir untuk memastikan bahwa fenomena
unbalance terjadi pada unit tersebut, karena program ini dapat memfilter fenomena 1 X
RPM yang tidak diakibatkan oleh gejala unbalance seperti looseness, misalignment dan
sebagainya.
Gambar 6.Pembacaanphasa Horizontal-Vertikal Point 3 dan Point 4
PembacaanVertikaldanHoriz
onal Point 3 : 65o
PembacaanVertikaldanHoriz
onal Point 4 : 132o
Pembacaanphasaarahaksialan
tara point 3 dengan point 4 :
32o
5. PT. PUPUK SRIWIJAYA PALEMBANG
5 PT. PETROKIMIA GRESIK
Dari pembacaan phasa pada gambar 6 tersebut terlihat bahwa phasa arah radial
mendekati 90o, sehingga dapat dipastikan fenomena unbalance terjadi pada unit tersebut.
Selanjutnya sensor accelerometer diletakkan pada arah horizontal point 3 untuk mengetahui
nilai unbalance murni dengan menggunakan program balance di alat CSI-2130. Nilai
bacaan unbalance murni yang didapat sebesar 5.35 mm/s. Tindakan In-situ balancing
merupakan jalan terbaik untuk menurunkan vibrasi secara signifikan.
II. Kronologi In-Situ Balancing 3U-GB302 Pusri III
Gambar 7. Proses Balancing Pada Diagram Vektor
Reference Run : 5.35 mm/s SudutPhasa : 345o
1st Trial Weight : 166 gram, Posisi : 345o (Pembacaan phasa original) + 100o = 445o /
85odarititiknol (titik nol adalah posisi dari reflector).
First Run : 4.97 mm/s SudutPhasa : 358o
2nd Trial Weight : 660 gram, Posisi : 85o + 66o = 151o dari titi knol
Second Run : 1.75 mm/s SudutPhasa : 247o
3rd Trial Weight : 600 gram, Posisi 151o – 18o = 133o dari titik nol
Final Run : 0.9 mm/s Sudut Phasa : 55o
66o
18o
Or
igi
na
l
(O
)
2n
d
Tr
ial
(T
)
O + T
1stTrial (T)
O
+
T
6. PT. PUPUK SRIWIJAYA PALEMBANG
6 PT. PETROKIMIA GRESIK
Tabel 2.Nilai Overall Vibrasi Sebelum dan Setelah dibalancing
Dari table diatas, terlihat bahwa nilai overall vibrasi sebelum dan setelah balancing
dapat turun secara signifikan. Pembacaan vibrasi point 3 arah aksial merupakan nilai
vibrasi tertinggi dimana zona status D (Rough) dapat turun menjadi B (Fair) sehingga
berdasarkan standar ISO 10816-3 dapat dijalankan secara aman.
Gambar 8 dan Gambar 9 menunjukkan spectrum frekuensi arah horizontal dan arah
aksial point 3. Pada spectrum frekuensi arah horizontal menunjukkan bahwa amplitude 1 X
RPM sebelum balancing 5.43 mm/s telah turun menjadi 1.87 mm/s setelah dilakukan
balancing. Selain spectrum 1 X RPM yang telah turun, gejala rotor rub juga dapat turun
secara signifikan. Hal ini ditandai dengan turunnya amplitude dibawah 1 mm/s pada
spectrum harmonic (2 X – 7 X RPM).
Spectrum frekuensi arah aksial menunjukkan bahwa amplitude 1 X RPM sebelum
balancing 11.89 mm/s telah turun menjadi 3.48 mm/s setelah dilakukan balancing. Selain
spectrum 1 X RPM yang telah turun, gejala rotor rub jugadapat turun secara signifikan. Hal
ini ditandai dengan turunnya amplitude dibawah 1 mm/s pada spectrum harmonic (2 X – 7
X RPM). Frekuensi 1 X RPM arah aksial masih tinggi bukan dari gejala unbalance lagi.
Frekuensi tersebut bias dari kemungkinan adanya clearance aksial tinggi pada rumah
bearing atau munculnya angular misalignment akibat adanya fenomena unbalance selama
beberapa hari setelah dilakukan alignment.
TitikUkur Description
Sebelum
Balancing
RMS (mm/s)
Setelah
Balancing
RMS (mm/s)
Zona Status
1
MOH Motor Outboard Horizontal 4.03 2.20 B→A
MOV Motor Outboard Vertial 1.92 0.77 A→A
MOA Motor Outboard Aksial 2.18 1.27 B→A
2
MIH Motor Inboard Horizontal 4.94 1.92 C→A
MIV Motor Inboard Vertikal 3.14 1.58 B→A
MIA Motor Inboard Aksial 2.48 1.04 B→A
3
FIH Fan Inboard Horizontal 5.87 2.19 C→A
FIV Fan Inboard Vertikal 5.89 2.00 C→A
FIA Fan Inboard Aksial 13.90 4.07 D→B
4
FOH Fan Outboard Horizontal 3.30 2.03 B→A
FOV Fan Outboard Vertikal 5.61 1.85 C→A
FOA Fan Outboard Aksial 4.39 3.62 B→B
7. PT. PUPUK SRIWIJAYA PALEMBANG
7 PT. PETROKIMIA GRESIK
Gambar 8. Spektrum Frekuensi Horizontal Point 3 Sebelum dan Sesudah Balancing
Gambar 9. Spektrum Frekuensi Aksial Point 3 Sebelum dan Sesudah Balancing
C. KESIMPULAN DAN SARAN
Nilai unbalance murni dengan menggunakan program balance pada akuisisi data CSI-
2130 sebesar 5.35 mm/s phasa 345o. Setelah dilakukan In-Situ Balancing, nilai
pembacaan unbalance murni turun secara signifikan dari 5.35 menjadi 0.9 mm/s phasa
55o.
Setelah dilakukan balancing, nilai overall vibrasi paling tinggi yang muncul sebesar 4.07
mm/s (lihat tabel 2). Berdasarkan standar ISO 10816-3, nilai overall vibrasi tersebut
masih layak untuk mengoperasikan suatu unit mesin dalam jangka waktu yang panjang.
Spektrum dominan 1 X RPM arah radial maupun arah aksial telah turun secara signifikan
setelah dilakukan proses Insitu balancing. Selain spectrum dominan 1 X RPM, spectrum
harmonic (2X – 8X RPM) juga telah turun secara signifikan sehingga dapat disimpulkan
bahwa gaya unbalance juga dapat menyebabkan rotor rub.
Rotor Rub turunsecarasignifikan
(Setelah Balancing).
Rotor
rubmasihtinggi(Sebelu
mBalancing).
Rotor rubmasihtinggi
(SebelumBalancing).
Rotor rubturunsecarasignifikan
(SetelahBalancing).
8. PT. PUPUK SRIWIJAYA PALEMBANG
8 PT. PETROKIMIA GRESIK
Amplitudo spectrum dominan 1 X RPM arah aksial masih sebesar 3.48 mm/s walaupun
penyebab gejala unbalance murni telah dihilangkan.Penyebab amplitude dominan 1 X
RPM masih tinggi bisa diakibatkan karena clearance axial bearing masih ada maupun
adanya angular misalignment yang mulai muncul. Untuk memastikan kemunculan gejala
tersebut, dapat dilakukan analisa thermography dengan menggunakan kamera
thermography sehingga dapat diketahui dengan pasti terjadinya gejala tersebut (lihat
lampiran halaman 12).
9. PT. PUPUK SRIWIJAYA PALEMBANG
9 PT. PETROKIMIA GRESIK
LAMPIRAN
Un-Balance
Unbalance Centerhung Rotor :
Misalignment Rotor :
Beda Phasaterbaca ± 90o
10. PT. PUPUK SRIWIJAYA PALEMBANG
10 PT. PETROKIMIA GRESIK
Looseness :
Typical Spectrum Phase Relationship
Type 'A'
Type 'B'
Mechanical Looseness is indicated by either type A, B or C spectra. Type 'A' is caused by structural
looseness/weakness of machine feet, baseplate or foundation, also by deteriorated grouting, loose hold-
down bolts at the base and distortion of the frame or base (i.e. Soft Foot). Phase analysis may reveal
approx. 180° phase difference between vertical measurements on the machine foot, baseplate and base
itself. Type 'B' is generally caused by loose pillow block bolts, cracks in the frame structure or bearing
pedestal. Type 'C' is normally generated by improper fit between component parts which will cause many
harmonics due to nonlinear response of loose parts to dynamic forces from the rotor. Causes a truncation
of time waveform. Type 'C' is often caused by a bearing liner loose in its cap, excessive clearance in
either a sleeve or rolling element bearing or a loose impeller on a shaft. Type 'C' phase is often unstable
and may vary widely from one measurement to the next, particularly if the rotor shifts position on the shaft
from one start-up to the next. Mechanical looseness is often highly directional and may cause noticeably
different readings if you compare levels at 30° increments in the radial direction all the way around one
bearing housing. Also note that looseness will often cause sub harmonic multiples at exactly 1/2 or 1/3 x
rpm (.5x, 1.5x, 2.5x etc.)